 机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立.docx
机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立.docx
- 文档编号:23886562
- 上传时间:2023-05-21
- 格式:DOCX
- 页数:12
- 大小:98.58KB
机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立.docx
《机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立.docx》由会员分享,可在线阅读,更多相关《机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立.docx(12页珍藏版)》请在冰豆网上搜索。
机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立
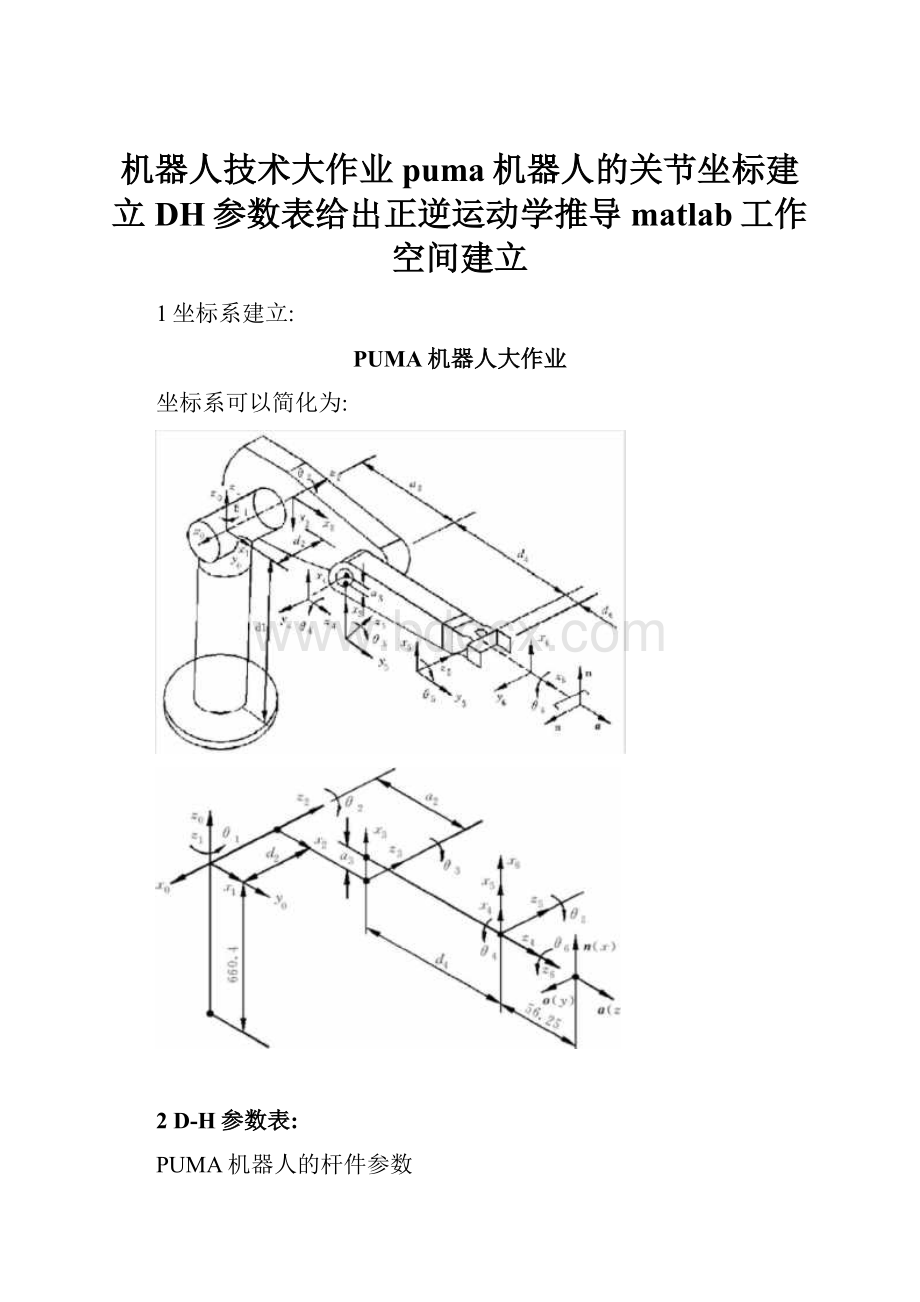
1坐标系建立:
PUMA机器人大作业
坐标系可以简化为:
2D-H参数表:
PUMA机器人的杆件参数
d10.6604m,d20.14909m,d40.43307m,d60.05625m,a20.4318m
a30.02032m
关节i
i
i
ai1
di
运动范围
1
90
0
0
0
-160。
~1600
2
0
-90
0
d20.14909m
-225°~45o
3
-90
0
a20.4318m
0
-45o~225o
4
0
-90
a30.02032m
d40.43307m
-110o~170
o
5
0
90
0
0
-100o~100
o
6
0
-90
0
d60.05625m
-266o~266
o
3正运动学推导
ci
si
0
a1
,ii
SiCi1
CiCi1
si1
disi1
由式Ti
可得
sisi1
cisi1
Ci1
diCi1
0
0
0
1
机械手变换矩阵
nxoxaxpx
0T6
nyoyaypynzozazpz0001
nx
c23(c6c5c4c1s6s4c1)s23c6s5c1
c6c5s4s1
ny
c23(c6c5c4s1s6s4s1)s23c6s5s1
c6c5s4c1
nz
s23(c6c5c4s6s4)c23c6s5
ox
c23(s6c5c4c1c6s4c1)s23s6s5c1
s6c5s4s1
oy
c23(s6c5c4s1c6s4s1)s23s6s5s1
s6s4c5c1
oz
s23(s6c5c4s6s4)c23c6s5
ax
c23s5c4c1s23c5c1s5s4s1
ay
c23s5c4s1s23c5s1s5s4c1
az
c23c5s23s5c4
px
a3c23c1a2c2c1d4s23c1d2s1
py
a3c23s1a2c2s1d4s23s1d2c1
pz
d4c23a3s23a2s2
s6c4s1
s6c4c1
c6c4s1
c6c4c1
4逆运动学推导
1.求1
用逆变换0Ti1左乘方程%0Ti工2T33T44T55T6两边:
0Ti10T6
Ci
Si
S!
0
0
Ci
0
0
0
0
1
0
0
0
0
1
nx
Ox
ax
得SiPx
C|Py
三角代换
Px
式中,
ny
nz
0
Oy
Oz
0
ay
az
0
Px
Py
Pz
1
d2
cos
Py
sin
22
-PxPy
atan2(Px,Py)
得到1的解
1atan2(py,px)atan2(d2,届p:
d;)
2•求3
10T6
平方和为:
d4S3a3C3
222,2,222
其中k
PxPyPzd2d4a2a3
2a2
解得:
3atan2(a3,d4)atan2(k,_d:
afk2)
C1C23
S1C23
S23
a2C3
nx
Ox
ax
Px
C|S23
SiS23
C23
a2S3
ny
Oy
ay
Py3T6
Si
C1
0
d2
nz
Oz
az
Pz
0
0
0
1
0
0
0
1
方程两边的元素(
1,4)
和(3,
4)
分别对应相等,得
C1C23P:
xIC23Py
S23Pza3
a2C3
0
ClS23P〉
C23P za2S3 d4 0 联立,得 S23和C23 Q a2Ssd4 GPx SPy Pz a? C3 a3 23 PxC1 2 PyS1 2 Pz a2C3a3 GPx S1Py Pz a2S3 d4 23 PxC1 2 PyS1 2 Pz S23和C23表达式的分母相等,且为正,于是 23 23atan2QqSsqPxdPy Pza2p3a3,a2C3 根据解1和3的四种可能组合,可以得到相应的四种可能值23,于是可得到 xSlpypza2S3d4 2的四种可能解 2233 式中2取与3相对应的值。 5.求5 0T410T6 c1c4c23s1s4 s1c4c23c1s4 s23c4 c3c4a2 d2s4 c4a3 nx ox ax Px s4c1c23s1c4 s4s1c23c1c4 s23s4 c3s4a2 d2c4 s4a3 ny oy ay Py 4T6 c1s23 s1s23 c23 s3a2d4 nz oz az Pz 0 0 0 1 0 0 0 1 6.求6 0T510T65T6 根据矩阵两边元素(2,1)和(1,1)分别对应相等,可得 nxc1c4c5c23 nyc4s1c5c23 s1s5s23s4c1c5 从而求得 6atan2s6,c6 5Matlab编程得出工作空间 可以将连杆6的原点做为机器人的动点,连杆 6原点相对于坐标系0就是°丁6的Px、Py、Pz,已 知: Px a3c23c1 a2c2c1 d4s23c1 Py a3c23s1 a2c2s1 d4s23s1 Pz d4c23 a3s23 a2s2 d2s1 d2c1 Matlab程序如下: clc,clear length2=431.8;length3=20.32; d2=149.09;d4=433.07; a=pi/180; fora1=-160*a: 20*a: 160*a fora2=-225*a: 20*a: 45*a a3=-45*a: 20*a: 225*a fork=1: length(a3) px(k)=cos(a1)*(length2*cos(a2)+length3*cos(a2+a3(k))-d4*sin(a2+a3(k)))-d2*sin(a1) py(k)=sin(a1)*(length2*cos(a2)+length3*cos(a2+a3(k))-d4*sin(a2+a3(k)))+d2*cos(a1) pz(k)=-a3(k)*sin(a2+a3(k))-length2*sin(a2)-d4*cos(a2+a3(k)) end plot3(px,py,pz),title('机器人的工作空间'),xlabel('xmm'),ylabel('ymm'),zlabel('zmm') holdon gridon end end 机器人工作空间——三维空间: 机営人師工三间 1000 T 4 bou 400 200 300 ■600 500 0 0 -503 ymm -tDOD,kqo iiinn ciTirh THANKS! ! ! 致力为企业和个人提供合同协议,策划案计划书,学习课件等等 打造全网一站式需求


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机器人 技术 作业 puma 关节 坐标 建立 DH 参数表 给出 运动学 推导 matlab 工作 空间
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《酒店人力资源管理》教案.docx
《酒店人力资源管理》教案.docx
-
《马克思主义基本原理概论》选择题复习题.docx
-
《全国100所名校示范卷》高三生物人教版西部卷一轮复习 第十五单元 《稳态与环境》综合检测.docx
-
《1吨有多重》教学设计反思及评点2篇.docx
-
《红飘带狮王》读书笔记.docx
-
《教综》真题答案.docx
-
《企业管理》复习题发学生.docx
-
《提高数学学困生的学习兴趣研究》课题工作总结报告.docx
-
《蟋蟀的住宅》的教学设计.docx
-
《园林建筑设计》教案.docx
-
《中西医结合内科学》精华笔记.docx
-
2三轴向加速度传感器长春汽车工业高等专科学校.docx
-
04装修工程施工合同.docx
-
5套打包四年级数学上期中考试单元综合练习题含答案解析.docx
-
《食品安全法》知识竞赛题目及答案.docx
-
《24式简化太极拳》简案.docx
-
《金融理论与实务》复习大纲.docx
-
《旅游地理》学案.docx
-
《企业集团财务管理》综合练习题参考答案11春.docx
-
《实践论》原文毛泽东.docx
-
《项目管理软件》课程复习题.docx
-
《员工手册》电子版范文.docx
-
《中小学布局整改措施》.docx
-
5旋风分离器安装.docx
-
10kV跨越架搭设施工方案设计.docx
-
#市关爱儿童服务中心暨救助站改造工程项目建议书.docx
-
《毛概》课程标准.docx
-
《人民日报》学习贯彻党的十七届四中全会精神系列.docx
-
《我的军训生活》作文800字.docx
-
《研发人员绩效考核奖励办法》.docx
-
1 《道路交通安全法》规定任何单位或者个人不得收缴机.docx
-
02电气检修规程.docx
-
北京成人英语三级考试真题及答案.docx
-
《实验十二NAT配置》实验参考答案思科530.docx
-
北京版小学英语单词必会1600个分类整理.docx
-
sap发票流程.docx
-
保险保障基金管理规定.docx
-
必修一期中测试题卷.docx
-
并粗细工艺设计.docx
-
北师大高一必修1《我爱这土地》仝美红PPT课件教案 一等奖新名师优质课获奖教学设计.docx
-
叉车日常保养维护管理系统规定.docx
-
产品质量法讲义.docx
-
城市规划师《城市规划管理与法规》模拟试题一.docx
-
变电站土建工程监理质量旁站方案.docx
-
成本法土地案例共20页文档.docx
-
诚信的主题班会教案.docx
-
初中生物教师教学工作总结6篇.docx
-
单位子单位工程安全的功能检验资料核查及主要功能抽查记录.docx
-
道路施工实习日记.docx
-
大学校园内冷饮系列产品营销对策分析总结报告.docx
-
二级建造师继续教育必修第五章复习题.docx
链接地址:https://www.bdocx.com/doc/23886562.html
