 机械设计 压床连杆机构的设计及运动分析方案二.docx
机械设计 压床连杆机构的设计及运动分析方案二.docx
- 文档编号:23861977
- 上传时间:2023-05-21
- 格式:DOCX
- 页数:14
- 大小:152.92KB
机械设计 压床连杆机构的设计及运动分析方案二.docx
《机械设计 压床连杆机构的设计及运动分析方案二.docx》由会员分享,可在线阅读,更多相关《机械设计 压床连杆机构的设计及运动分析方案二.docx(14页珍藏版)》请在冰豆网上搜索。
机械设计压床连杆机构的设计及运动分析方案二
机械原理课程设计编程说明书
设计题目:
压床连杆机构的设计及运动分析(方案二)
指导教师:
郝志勇席本强
设计者:
马丽丽
学号:
0907240112
班级:
液压09-1班
2011年7月1日
辽宁工程技术大学
机械原理课程设计任务书(三)
姓名马丽丽专业液压班级09-1学号12
一、设计题目:
压床连杆机构的设计及运动分析
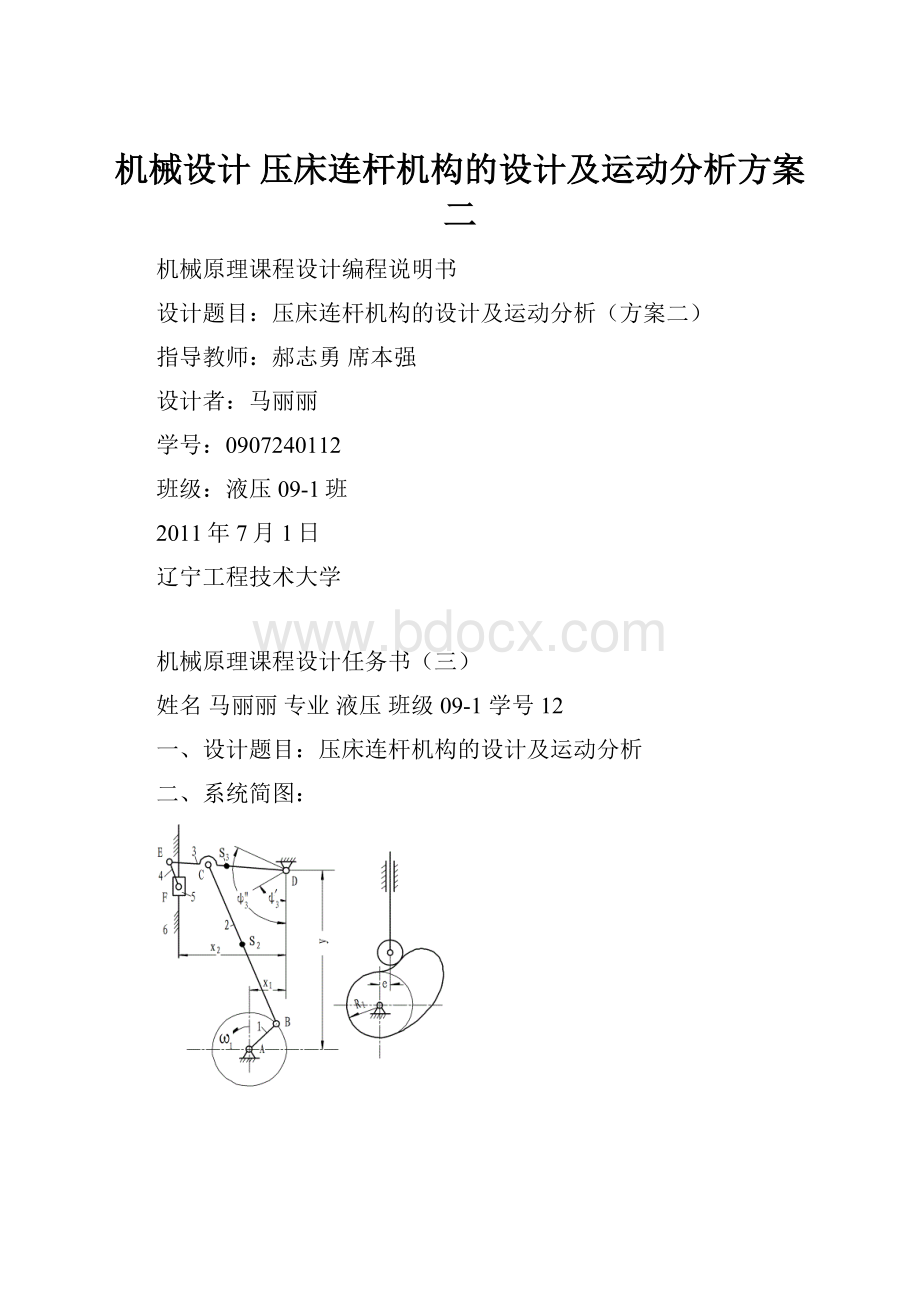
二、系统简图:
三、工作条件
已知:
中心距
、
、
,构件3的上、下极限角
、
,滑块的冲程H,比值
、
各构件重心S的位置,曲柄每分钟转数
。
四、原始数据
连杆机构的设计及运动分析
°
60
170
260
60
120
180
1/2
1/4
90
1/2
1/2
五、要求:
1)设计连杆机构,作机构运动简图(选择适当的比例尺)、机构两个位置的速度多边形和加速度多边形、滑块的运动线图(位移、速度和加速度曲线)。
2)用C语言编写程序对机构进行运动分析,并打印出程序及计算结果。
3)编写出设计计算说明书。
指导教师:
郝志勇席本强
开始日期:
2011年6月26日完成日期:
2011年7月1日
目录
一设计任务及要求…………………………………………
二数学模型的建立…………………………………………
三程序框图…………………………………………
四程序清单及运行结果………………………………
五设计总结……………………………………………
六参考文献……………………………………………
七附录(中期检查报告)…………………………
一设计任务及要求
任务:
连杆机构的设计及运动分析
已知:
中心距X1=60mm,X2=170mm,Y=260mm。
构件3的上、下极限Φ=60、Φ/=120,滑块的冲程H=180mm,比值CE/CD=1/2,EF/DE=1/4,各构件S重心的位置,曲柄每分钟转速N1=90r/min。
要求:
1)建立数学模型;
2)用C语言编写计算程序、并运行;
3)绘制从动件运动规律线图,并进行连杆机构的动态显示;
4)用计算机打印出计算说明;
二数学模型的建立
(1)
按复数式可以写成
由于
,上式可简化为
(2)
根据
(2)式中实部、虚部分别相等得
(3)
(4)
由(3)、(4)式联立消去
得
(5)
令:
则(5)式可简化为
(6)
解得之
(7)
同理,根据(3)、(4)式消去
可解得
(8)
其中:
(7)(8)式为c、b杆的角位移方程。
由于
、
都是时间的函数,为简便,将(3)、(4)式对时间求导,得
,
(9)
将
(2)式对时间数得
,(10)
,(11)
曲柄可近似看成匀角速度转动,即
三程序框图
输入a,b,c,d,
输入N
作循环,For(i=0;i 依次计算 将计算的 结果分别存入数组或文件中 按格式输出所有计算结果 初始化图形系统 绘制直角坐标系 直角坐标系下分别绘出角位移、角速度、角加速度图象 四程序清单及运行结果 #include #include #include #include #include #definePi3.1415926 #defineN100 voidinit_graph(void); voidinitview(); voiddraw(); floatsita1[N+1],sita2[N+1],sita3[N+1], omigar2[N+1],omigar3[N+1],epsl2[N+1],epsl3[N+1]; floatLab=60,Lbc=276,Lcd=126,Lad=300,omiga1=9.42,ipsl1=0; main() { inti; floatl1,l2,m1,m2,n1,n2; floattheta1,detat; floattheta2,theta3,omiga2,omiga3,ipsl2,ipsl3; detat=10*Pi/(N*omiga1); for(i=0;i { theta1=omiga1*detat*i; /*系数计算*/ l1=2*Lab*Lcd*cos(theta1)-2*Lcd*Lad; m1=2*Lab*Lcd*sin(theta1); n1=Lab*Lab+Lcd*Lcd+Lad*Lad-Lbc*Lbc-2*Lab*Lad*cos(theta1); l2=2*Lab*Lbc*cos(theta1)-2*Lbc*Lad; m2=2*Lab*Lbc*sin(theta1); n2=Lcd*Lcd-Lab*Lab-Lbc*Lbc-Lad*Lad+2*Lab*Lad*cos(theta1); /*printf"l1=%f\tm1=%f\tn1=%f\n",l1,m1,n1);*/ /*计算转角*/ theta2=asin(n2/sqrt(l2*l2+m2*m2))-asin(l2/sqrt(l2*l2+m2*m2)); theta3=asin(n1/sqrt(l1*l1+m1*m1))-asin(l1/sqrt(l1*l1+m1*m1)); /*printf("theta2: %f\t%f",n2/sqrt(l1*l1+m2*m2),l2/sqrt(l2*l2+m2*m2)); printf("theta3: %f\t%f",n1/sqrt(l1*l1+m1*m1),l1/sqrt(l1*l1+m1*m1));*/ /*计算角速度*/ omiga2=omiga1*Lab*sin(theta3-theta1)/(Lbc*sin(theta2-theta3)); omiga3=omiga1*Lab*sin(theta1-theta2)/(Lcd*sin(theta3-theta2)); /*计算角加速度*/ /*ipsl2*/ ipsl2=Lab*ipsl1*sin(theta1-theta3)+Lab*omiga1*omiga1*cos(theta1-theta3); ipsl2+=Lbc*omiga2*omiga2*cos(theta3-theta2)-Lcd*omiga3*omiga3; ipsl2=ipsl2/(Lbc*sin(theta3-theta2)); /*ipsl3*/ ipsl3=-Lab*ipsl1*sin(theta1-theta2)-Lab*omiga1*omiga1*cos(theta1-theta2); ipsl3-=Lbc*omiga2*omiga2+Lcd*omiga3*omiga3*cos(theta2-theta3); ipsl3=ipsl3/(Lcd*sin(theta2-theta3)); /*计算结果存入数据组中*/ sita1[i]=theta1; sita2[i]=theta2; sita3[i]=theta3; omigar2[i]=omiga2; omigar3[i]=omiga3; epsl2[i]=ipsl2; epsl3[i]=ipsl3; } /*输出运算结果*/ for(i=0;i<=N;i++) { printf("i=%d\n,sita1[i]=%f\t,sita2[i]=%f\t,sita3[i]=%f\t,omigar2[i]=%f\t,omigar3[i]=%f\t,epsl2[i]=%f\t,epsl3[i]=%f\n\n",i,sita1[i],sita2[i],sita3[i],omigar2[i],omigar3[i],epsl2[i],epsl3[i]); } init_graph();/*初始化图形系统*/ initview();/*建立坐标系*/ /*话构件2的角位移、角速度、角加速度*/ draw(sita2,150,50); setcolor(WHITE); setlinestyle(1,1,1); draw(omigar2,150,20); setcolor(RED); setlinestyle(2,1,1); draw(epsl2,150,1); setcolor(YELLOW); /*画构件3的角位移、角速度、角加速度*/ draw(sita3,300,20); setcolor(WHITE); setlinestyle(1,1,1); draw(omigar3,300,10); setcolor(RED); setlinestyle(2,1,1); draw(epsl3,300,1); } voidinit_graph() { intgd=DETECT,gmode; initgraph(&gd,&gmode,"c: \\turboc2"); } voidinitview() { inti,j,px,py; cleardevice(); setfillstyle(SOLID_FILL,BLUE); bar(100,0,500,479); setcolor(YELLOW); for(i=0;i<=1;i++) { px=100; py=150+150*i; setcolor(YELLOW); line(px,py,px+300,py); line(px,py-100,px,py+100); line(px,py-100,px-3,py-100+5); line(px,py-100,px+3,py-100+5); line(px+300,py,px+300-5,py+3); line(px+300,py,px+300-5,py-3); setcolor(YELLOW); settextstyle(1,HORIZ_DIR,2); outtextxy(px+300,py,"t"); } } voiddraw(array,py,scale)/*array要作图的数组,py起始y位置,scale纵向放大倍数*/ floatarray[N+1]; intpy,scale; { inti; floatf,x,y; moveto(100,200); for(i=0;i<=N;i++) { x=100+300*i/N; y=py+array[i]*scale; lineto(x,y); } } _ 设计结果 1连杆运动示意图 2连杆参数的计算结果 i=97 sita1[i]=30.473450,sita2[i]=0.284469,sita3[i]=1.569408,omigar2 [i]=-1.256991,omigar3[i]=-4.401760,epsl2[i]=-25.005093,epsl3[i]=24.149 408 i=98 sita1[i]=30.787609,sita2[i]=0.333648,sita3[i]=1.496754,omigar2 [i]=-1.896683,omigar3[i]=-4.008224,epsl2[i]=-17.495123,epsl3[i]=41.845 966 i=99 sita1[i]=31.101767,sita2[i]=0.397849,sita3[i]=1.479345,omigar2 [i]=-2.262758,omigar3[i]=-3.320374,epsl2[i]=-7.802946,epsl3[i]=54.819 057 i=100 sita1[i]=0.000000,sita2[i]=0.000000,sita3[i]=0.000000,omigar2 [i]=0.000000,omigar3[i]=0.000000,epsl2[i]=0.000000,epsl3[i]=0.0000 3位移、加速度、角速度曲线的绘制 五设计总结 通过本次机械原理课程设计,我学到了许多知识。 在设计初级阶段,我学会了数学建模的基本方法,在编程的时候学会了更多C语言知识,在画运动简图时,我熟识了画法。 重要的是这次设计将我们学的书本知识和实际相结合,加深了对知识的理解。 但是,由于时间只有一周,许多知识都是现学现用,在设计过程中不免遇到许多困难。 通过同学们的帮助,一一解决,因此,我发现了在实践过程中集体力量的伟大。 不过自己能力的欠缺是一定存在的,我要在以后的学习生活中继续努力,尽量将自己的所学运用到实践中。 六参考文献 《机械原理课程设计指导书》徐萃萍冷兴聚 《机械原理》孙恒陈作模 《C程序设计》谭浩强 《C语言典型零件CAD》王占勇 《计算机图形学》罗笑南王若梅


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械设计 压床连杆机构的设计及运动分析方案二 连杆机构 设计 运动 分析 方案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《公务员财产申报制度》.docx
《公务员财产申报制度》.docx
-
《儿童口腔病学》汇总题库集.docx
-
《建筑施工组织与管理》教案教学内容.docx
-
《班委选举细则》.docx
-
《光伏组件监造技术标准》.docx
-
《年终表彰大会讲话稿 表彰大会致辞稿》.docx
-
《听颖师弹琴》《李凭箜篌引》分别鉴赏及对比鉴赏加练习人教版高一选修.docx
-
《鹬》分镜头脚本.docx
-
5套打包宜昌市小学四年级语文上期中考试单元测试题及答案.docx
-
16开纸田字格word字帖模板.docx
-
315食品安全活动策划书.docx
-
CFG桩基础施工方案详解.docx
-
08人机工程学中英文资料外文翻译文献.docx
-
《读古典名著口百味人生》获奖精品省优获奖教案 部编版语文精品.docx
-
《功课很重要》教案1学习资料.docx
-
《冷拼工艺》教案.docx
-
《唐人街探案3》电影观后感《唐人街探案3》心得作文5篇.docx
-
《C语言程序设计》习题.docx
-
《幼儿园课程游戏化的实践研究》.docx
-
4现场管理档案.docx
-
13级西医专业基础综合测评答.docx
-
100部校园电影全.docx
-
CAD制图标准.docx
-
《分数除法一.docx
-
edb72192ac02de80d4d8d15abe23482fb5da0291.docx
-
H236车联网资料路尚行业版OMP操作手册服务商0618.docx
-
jarlasscon门机.docx
-
《百分百责任学习心得》.docx
-
《管理学基础》习题18章单凤儒.docx
-
《旅游专业日语》课程实施方案.docx
-
《铁路旅客运输服务》学习指导书.docx
-
《预算会计》课程标准.docx
-
煤矿矿井初步设计毕业设计说明书文档格式.docx
-
人教版小学数学五年级上册口算题卡全册Word格式.docx
-
天津市中考英语写作指导Word文档下载推荐.docx
-
汽车个人车辆抵押借款合同文档Word格式.docx
-
申论6075分经验Word格式文档下载.docx
-
前台收银员工作职责内容范文3篇Word格式文档下载.docx
-
三角形的证明讲义Word文档下载推荐.docx
-
莫言演讲稿全文讲故事人三篇Word格式文档下载.docx
-
上期学校德育工作计划Word文档下载推荐.docx
-
农产品优质企业网站建设及运营推广可行性方案Word格式.docx
-
四年级数学教学工作总结五篇Word下载.docx
-
权威普洱茶营销分析Word文档下载推荐.docx
-
童装店创业计划书Word文档格式.docx
-
山东高考英语考试说明样题及其解答Word下载.docx
-
社区低保工作总结文档格式.docx
-
山东省济南市中考语文试题图片版含答案Word文件下载.docx
-
三措一案线路文档格式.docx
-
外研版英语句子结构与成分专项及解析Word格式.docx
-
师恩难忘作文30篇Word格式文档下载.docx
