 堆取料机斗轮机防碰撞控制系统.docx
堆取料机斗轮机防碰撞控制系统.docx
- 文档编号:23860755
- 上传时间:2023-05-21
- 格式:DOCX
- 页数:8
- 大小:563.95KB
堆取料机斗轮机防碰撞控制系统.docx
《堆取料机斗轮机防碰撞控制系统.docx》由会员分享,可在线阅读,更多相关《堆取料机斗轮机防碰撞控制系统.docx(8页珍藏版)》请在冰豆网上搜索。
堆取料机斗轮机防碰撞控制系统
堆取料机(斗轮机)防碰撞定位控制系统
中海达定位技术有限公司(编制)
2015年5月16日星期六
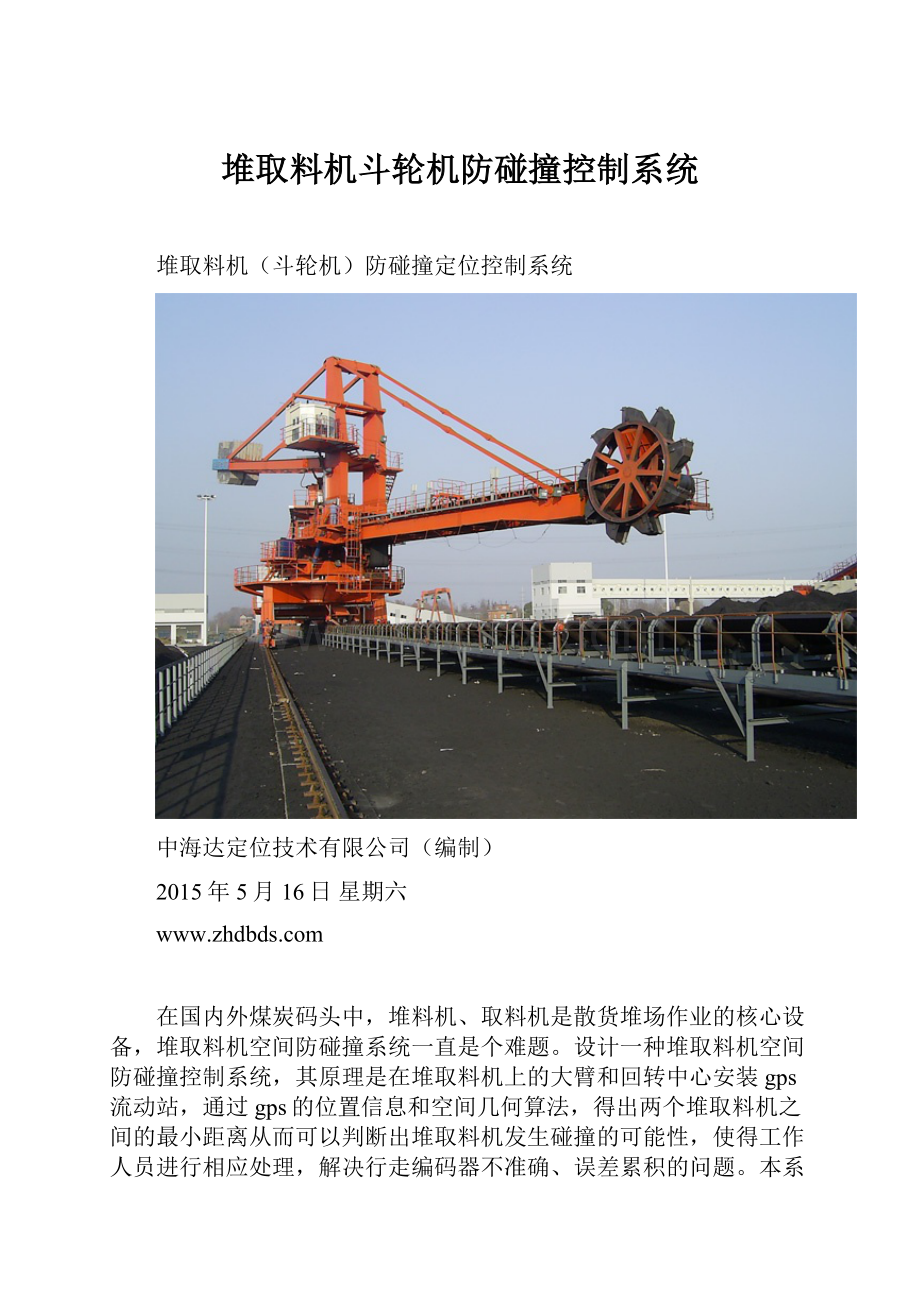
在国内外煤炭码头中,堆料机、取料机是散货堆场作业的核心设备,堆取料机空间防碰撞系统一直是个难题。
设计一种堆取料机空间防碰撞控制系统,其原理是在堆取料机上的大臂和回转中心安装gps流动站,通过gps的位置信息和空间几何算法,得出两个堆取料机之间的最小距离从而可以判断出堆取料机发生碰撞的可能性,使得工作人员进行相应处理,解决行走编码器不准确、误差累积的问题。
本系统可以实时计算出堆取料机大臂的相对位置和距离,可实现两台甚至多台堆取料机在同一个场垛中安全作业。
1背景技术
堆取料作业过程中,在一个堆场中经常需要使用多个堆取料机进行作业。
避免空间碰撞事故。
在一个堆场中可能有多个堆取料机,沿着行走轨道进行行走作业,在行走过程中,多个堆取料机的大臂之间有可能会发生碰撞。
目前国内没有有效来提前预知堆取料机之间是否将要发生碰撞,堆取料机空间防碰撞是堆取料作业过程中的难题。
具体来说,现有的防碰撞方法中需要结合堆取料机的行走数据,而现有的方法获取的堆取料机的行走数据经常不准,由于堆取料机的行走距离很长,都在1500m以上,而用于获取堆取料机的行走数据的行走编码器都安装在行走轮上,堆取料机的行走轨道与堆取料机的行走轮之间的摩擦力不均,一旦堆取料机的行走轮出现打滑现象,行走数据就会出现不准确的情况,长时间累积会造成误差越来
越大,即使通过行走定点校正对编码器进行修正,但不准确因素仍无法彻底克服。
其次,对大臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、回转3个编码器的数值进行空间建模,而这3个编码器都有不同程度的误差,这就造成累积误差,故大臂空间坐标的准确性不高。
另一种现有的防碰撞方法是根据2个堆取料机是否处于一个场垛进行判断,如果2个堆取料机不在同一个场垛就可以正常作业。
2个堆取料机进入一个场垛进行作业时,就对两个堆取料机都进行锁定,使其不能工作,由此避免堆取料机之间发生碰撞,这严重影响了堆取料机的同场作业。
由于以上原因,现有的防碰撞方法无法有效避免堆取料机空间防碰撞问题,使得2个堆取料机无法同时在同一个堆场中安全作业,严重影响效率。
故当前一般都采用人工监控的方法来避免空间碰撞事故。
2具体设计方案
堆取料机空间防碰撞系统,该系统包括:
大臂位置反馈系统、空间数据计算系统、空间防碰撞控制系统。
现在分别介绍其详细设计。
2.1大臂位置反馈系统
通常的大臂空间位置反馈都是采用行走、回转、俯仰三个编码器的数值计算得出的,本设计采用当今世界上最先进的定位手段-RTKGPS测量系统。
RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分(Real-timekinematic)方法,是GPS应用的重大里程碑。
高精度的GPS测量必须采用载波相位观测值,RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。
流动站不仅通过数据链接收来自基准站
的数据,还要采集GPS观测数据,并在系统内组成差分观测值
进行实时处理,同时给出厘米级定位结果,历时不到一秒钟。
基准站的位置可以根据具体需要设置在任意位置,在本系统中,选取中控室安装一台基准站,每台堆取料机上安装两台流动站,分别安装在大机回转中心点和大臂头部中心点处,流动站安装位置如下图所示:
在图中,1为1号流动站,2为2号流动站。
两个流动站实时检测空间的三维坐标信息,并通过以太网传输给中控室的plc主机,这样根据“两点确定一条直线”原理,中控plc就可以实时的知道堆取料机的大机回转中心和堆取料机的大臂头部中心所在轴线的位置了。
通过使用流动站和基准站来检测的大臂位置信息可以精确到厘米级,并且不受堆取料机自身行走轮打滑和其他编码器累积误差的影响,因此比现有的防碰撞方法更加准确高效。
克服了现有技术中由于大臂空间位置反馈都是采用行走、回转、俯仰三个编码器的数值计算得出的,而造成的误差累积问题。
2.2空间数据计算系统
空间数据计算系统的主要任务是根据采集到的各堆取料机臂的大臂位置信息来计算任意两台堆取料机大臂的空间最小距离。
可以通过多种方法来根据位置信息确定多个堆取料机中任意两个堆取料机的大臂之间的最小距离,由于堆取料机的大臂较长,两个堆取料机之间的距离可以近似看作是两个堆取料机的大臂之间的距离。
所以两个堆取料机之间的最小距离为:
一堆取料机的大机回转中心和堆取料机的大臂头部中心所构成的线段、与另一堆取料机的大机回转中心和堆取料机的大臂头部中心所构成的线段之间的最小距离。
其中当两个堆取料机的大臂共面时,最小距离为一堆取料机的大臂头部中心到另一个大机回转中心和大臂头部中心所构成的线段的垂直距离或两个堆取料机的大臂头部中心之间的最小距离;当两个堆取料机的大臂异面时,最小距离为一堆取料机的大机回转中心和堆取料机的大臂头部中心所构成的线段、与另一堆取料机的大机回转中心和堆取料机的大臂头部中心所构成的线段的公垂线段的距离或两个堆取料机的大臂头部中心之间的最小距离。
2.3空间防碰撞控制系统
根据上述过程得出最小距离后,可以将最小距离与第一预定距离和第二预定距离进行比较;当最小距离小于第一预定距离,判断碰撞可能性为较高;当最小距离小于第一预定距离而大于第二预定距离时,判断碰撞可能性为中等;当最小距离大于第二预定距离时,判断碰撞可能性为较低。
当判断可能性为较高时,进行碰撞报警,使得工作人员得知堆取料机之间即将发生碰撞,可以进行停机等处理;当判断可能性为中等时,进行减速报警,使得工作人员得知堆取料机之间可能要发生碰撞,需要减慢堆取料机运行速度;当判断可能性为较低时,不进行报警,堆取料机可以安全地进行作业。
2.4多台堆取料机的防碰撞控制
为了合理利用堆场,通常一个堆场上会出现多台堆取料机作业的情况,现以三台堆取料机同时工作为例,进行多台堆取料防碰撞控制的分析。
设三台堆取料机分别为A、B、C。
则作为A堆取料机,需要同时计算与B堆取料机、C堆取料机之间的最小距离,即Mindist1AB(共面)、Mindist1AC(共面)、Mindist2AB(异面)、Mindist2AC(异面),然后分别与B堆取料机、C堆取料机的第一和第二预定距离进行比较,根据对比情况进行相应的报警。
同理,作为B堆取料机和C堆取料机采用同样地方法进行计算对比,由此可实现多台堆取料机的防碰撞控制。
3项目实现与成效
根据本设计提供的堆取料机空间防碰撞系统,黄骅港堆取料机进行了多台大机防碰撞试验,即分别在两天取料机和一台堆料机的回转中心和悬臂头部安装了gps数据模块,并进行了数据采集和空间几何算法计算,再将计算结果传给plc进行防碰撞控制的计算与报警,效果显著。
本项目不但解决了行走打滑的问题,而且不需要使用编码器数据,降低了误差;同时,计算过程相对简单、精度高,可以实现多个堆取料机同场作业,并且能够实时检测各个大臂之间的最小距离,提高了安全性和作业效率,可以用于多种类型的堆取料机,可以提高同场作业效率70%,值得推广。
中海达介绍
广州中海达卫星导航技术股份有限公司(以下简称中海达)于2011年2月15日在深圳创业板上市(股票代码:
300177),是国内测绘地理信息技术装备领域第一家,也是迄今为止唯一一家上市企业。
中海达成立于1999年,始终专注测绘与地理信息领域,长期致力于GNSS核心技术研发,积累了大量的自主知识产权和软件著作权,是国家高新技术企业和优秀软件企业,多年来一直以前瞻的技术引领整个行业的革新和发展。
公司设有业内唯一的企业博士后工作站,与中科院水声研究所、武汉大学、西南交通大学、中南大学等科研院所建立联合实验室等研发机构。
公司的双频GPS接收测量技术、高精度GIS数据采集处理技术、超声波测深测量技术等被评定为“国内领先,国际先进水平”。
中海达拥有GNSS产品、GIS产品、海洋产品、移动测量系统等核心业务,成长为国内GNSS龙头企业。
公司上市后,积极拓展光电产品、三维激光、农机自动导航、机械精密控制、室内定位、空间数据等新兴业务领域。
目前,中海达已经拥有广州市中海达测绘仪器有限公司、广州中海达定位技术有限公司、苏州迅威光电科技有限公司、武汉海达数云技术有限公司、广州都市圈网络科技有限公司、南京声宏毅霆网络科技有限公司、郑州联睿电子科技有限公司、江苏中海达海洋信息技术有限公司、广州都市圈信息技术服务有限公司、浙江中海达空间信息技术有限公司等多个子公司,同时,建立起了覆盖全国的销售和服务网络,竭诚为广大用户提供服务,并能根据用户需求量身定制,提供全面、系统的解决方案。
中海达,始终秉持专注、创新、坚韧的企业精神,掌握核心技术,推动中国卫星导航产业国际化,致力于成为卫星导航领域全球第一品牌。
广州中海达定位技术有限公司介绍
广州中海达定位技术有限公司(以下简称中海达定位)是广州中海达卫星导航技术股份有限公司(股票代码:
300177)全资子公司。
中海达定位主要承担着利用集团产品进行新的行业应用拓展的使命和任务,目前已在全国建立起完善的渠道和销售服务体系,依托分支机构和合作伙伴,共同为客户提供服务。
中海达定位主营“中海达”品牌的系统工程业务,率先在行业推出“安全卫士”系列在线监测系统,广泛应用在尾矿库、水库大坝、滑坡、桥梁、深基坑边坡监测,精密机械控制等,为用户提供最完善的系统服务,为工程安全和科学决策提供技术支撑。
中海达定位将中海达独有的GNSS技术和产品优势率先引入工程应用领域,领先国内同行。
凭借成熟的GNSS技术以及强大的团队实力、工程设计、工程实施、人员培训和后期支持等,形成全方位的专业技术与工程应用综合解决方案。
关注定位应用(微信:
dingweiyingyong)随时掌握国内高精度定位应用行业头条资讯。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 堆取料机斗 轮机 碰撞 控制系统
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《公务员财产申报制度》.docx
《公务员财产申报制度》.docx
-
《儿童口腔病学》汇总题库集.docx
-
《建筑施工组织与管理》教案教学内容.docx
-
《班委选举细则》.docx
-
《光伏组件监造技术标准》.docx
-
《年终表彰大会讲话稿 表彰大会致辞稿》.docx
-
《听颖师弹琴》《李凭箜篌引》分别鉴赏及对比鉴赏加练习人教版高一选修.docx
-
《鹬》分镜头脚本.docx
-
5套打包宜昌市小学四年级语文上期中考试单元测试题及答案.docx
-
16开纸田字格word字帖模板.docx
-
315食品安全活动策划书.docx
-
CFG桩基础施工方案详解.docx
-
08人机工程学中英文资料外文翻译文献.docx
-
《读古典名著口百味人生》获奖精品省优获奖教案 部编版语文精品.docx
-
《功课很重要》教案1学习资料.docx
-
《冷拼工艺》教案.docx
-
《唐人街探案3》电影观后感《唐人街探案3》心得作文5篇.docx
-
《C语言程序设计》习题.docx
-
《幼儿园课程游戏化的实践研究》.docx
-
4现场管理档案.docx
-
13级西医专业基础综合测评答.docx
-
100部校园电影全.docx
-
CAD制图标准.docx
-
《分数除法一.docx
-
edb72192ac02de80d4d8d15abe23482fb5da0291.docx
-
H236车联网资料路尚行业版OMP操作手册服务商0618.docx
-
jarlasscon门机.docx
-
《百分百责任学习心得》.docx
-
《管理学基础》习题18章单凤儒.docx
-
《旅游专业日语》课程实施方案.docx
-
《铁路旅客运输服务》学习指导书.docx
-
《预算会计》课程标准.docx
-
山东省普通高校招生春季考试英语试题图片版.docx
-
初中文言文阅读精选.docx
-
木门窗安装施工方案1.docx
-
民用建筑设计通则GB50352.docx
-
最新新旧版《评审准则》的对比及区别.docx
-
桥梁桩基钢筋笼加工及焊接作业指导书.docx
-
初中部1819学年上学期八年级期中考试英语试题附答案.docx
-
讨论如何弘扬我国传统民族音乐艺术增强大学生的文化自信音乐论文艺术论文.docx
-
人教新版高中地理必修一 第一章《宇宙中的地球》单元检测题 21含答案解析.docx
-
牛津译林版英语7BUnit5精品教学案Word版共10课时.docx
-
造价员考试大纲安装造价员.docx
-
中心浚中心城区综合防灾专项规划设计.docx
-
为某购物中心设置一个促销方案.docx
-
25万吨年双峰工艺BORSTAR聚乙烯装置中石化.docx
-
《长征》教学设计.docx
-
作为幼儿园学生家长代表发言.docx
-
最新人教版三年级下册数学第六单元 年月日 全单元教案含教学反思.docx
-
仙三攻略.docx
-
WindowsServer网络操作系统教程参考.docx
