 基于VB60的慧鱼机械手模型监控系统.docx
基于VB60的慧鱼机械手模型监控系统.docx
- 文档编号:23833769
- 上传时间:2023-05-21
- 格式:DOCX
- 页数:44
- 大小:392.75KB
基于VB60的慧鱼机械手模型监控系统.docx
《基于VB60的慧鱼机械手模型监控系统.docx》由会员分享,可在线阅读,更多相关《基于VB60的慧鱼机械手模型监控系统.docx(44页珍藏版)》请在冰豆网上搜索。
基于VB60的慧鱼机械手模型监控系统
基于VB的机械手爪“慧鱼模型”远程监控
机械设计制造及其自动化专业
[摘 要]制造业的快速发展使得设备远程在线工程支持和远程操作成为一个热点研究的问题。
以设备控制器为终端、PC机为控制端的主从式计算机实时监控系统在现代工业设备中得到了广泛的应用。
许多设备和计算机都可以通过串口对外设进行检测与控制。
本课题在慧鱼创意组合模型的基础上进行了机械手爪的远程控制研究,建立了远程控制系统。
该系统的硬件构成为:
Fischertechnik智能接口板为基于慧鱼模型的机械手底层控制器,PC机通过串口与Fischertechnik智能接口板上的RS232口相连,构成上层控制器。
研究中通过分析不同控制状态下Fischertechnik智能接口板与PC机串口的通讯数据,提取出其通信协议。
在此基础上,采用VB6.0中的MSComm控件对串口进行编程,通过读串口检测到Fischertechnik智能接口板发出的状态信号,通过写串口实现对模型的运动控制,从而脱离了慧鱼软件LLWin直接控制其模型设备。
依据机械手爪的动作要求,采用VB6.0编制了机械手爪的控制界面,实现了在计算机上对模型中各运动的点动调整、循环运行,同时还能实时监控与显示模型中各运动件的执行状态。
[关键词]慧鱼模型;机械手爪;串行通信;远程监控;VB
RemoteControlofFischertechnikManipulatorModelBasedonVB6.0Software
MechanicalDesign,ManufacturingandAutomationMajor LiLi-xin
Abstract:
Withtherapiddevelopmentofmanufacturing,remotetechnicalsupportingonlineofequipmentanditsoperationarebecomingahotstudyfield.Computerontimemonitoringwithmaster-slavecontrolmodethatequipmentcontrollerworksasterminalandpersonalcomputerworksasacontrollerfindawidelyuseinmodernindustryequipments.ManyequipmentsManyequipmentscancommunicatewithcomputerbyserialportinordertodetectandcontrol.ThepaperstudiedremotecontrolofmanipulatorbasedonFischertechnikmodel.Remotecontrolsystemwassetup.ThesystemhardwareincludeFischertechnikboardwhichworksasthebasecontrollerandcomputerwhichworksasuppercontroller.ComputerlinkwithRS232portofFischertechnikboardbyserialport.Bymeansofanalysiscommunicationdateondifferentcontrolstatus,communicationprotocolbetweenFischertechnikboardandcomputerserialportisextracted.Onthebase,programtheserialportwithMSCommcontrolinVB6.0software,detectstatussignalsentbyFischertechnikboardbyreadingserialportandwritetheserialport,themodelmotionisthusundercontrol.ThismakethemodelcontrollingbreakawayfromtheLLWinsoftware.Accordingtomanipulatorcontrolrequirement,ancontrolinterfacewasprogrammedwithVB6.0.Itcancontrolthemodelrunninginlooporcrawlingwiththecomputer.Besides,monitoringanddisplayingofthemodelmotionstatuscanbeeasilyaccomplishedbythisinterface.
Keywords:
Fischertechnikmodel;manipulator;serialcommunication;remotemonitoring;VB
目录
1前言1
1.1本课题所涉及的问题在国内(外)的研究现状综述1
1.2本课题的任务及要求1
1.3可行性分析1
2数据交换2
2.1串行通信(SerialCommunication)优势2
2.2计算机与设备的数据交换3个步骤2
3慧鱼创意组合模型3
3.1慧鱼创意组合模型3
3.2关于fischertehnik的接口板4
3.2.1fischertehnik的接口板4
3.2.2单片机硬件系统5
4Mscomm控件6
4.1Mscomm控件介绍6
4.1.1MSCOMM控件的主要属性6
4.1.2MSCOMM控件的事件6
4.1.3MSCOMM控件进行串行通信的一般步骤6
4.1.4MSCOMM控件通信方式的选择7
4.2利用MSCOMM控件接收数据7
4.3用MSCOMM控件发送数据8
5控制实现的原理与方法9
5.1监控对象9
5.1.1监控对象慧鱼模型9
5.1.2机械手爪E端数字输入量与M端控制电机输出的相关动作9
5.1.3机械手爪时序图10
5.1.4机械手爪程序流程图11
5.2慧鱼接口板与PC机的通信协议12
5.2.1慧鱼接口板12
5.2.2PC-RS232通信协议的实现过程13
5.3慧鱼模型控制工程的建立14
5.3.1慧鱼智能接口板控制程序14
5.3.2工程的建立15
6机械手爪“慧鱼模型”控制程序16
6.1串行口初始化16
6.2数字输入量的编程16
6.3机械手爪“慧鱼模型”控制程序19
结束语30
参考文献31
附录32
致谢33
1前言
1.1本课题所涉及的问题在国内(外)的研究现状综述
随着制造业的快速发展,制造全球化是当今制造也的一个发展趋势,远程在线工程支持和远程操作的研究正成为信息时代制造业研究的一个热点问题。
目前制造业的一些复杂的加工设备和产品,也都设有良好的用于远程通讯控制的扩展接口和与上机位进行通讯的完整协议,这些都为实现产品和设备的远程访问、操作与控制提供了良好的基础和条件。
柔性制造技术逐渐应有与生产制造中,机械手爪是柔性制造系统中的基本加工单元,本课题利用慧鱼创意组合模型搭建机械手爪模型,针对该模型建立控制系统,实时地传输控制信息和反馈信息。
通过对硬件和软件两个方面的研究对立式铣削加工中心系统的设计、仿真和控制系统进行一些创新与探索。
采用基于VB的远程控制软件完成服务器和客户端程序设计,实时地传输控制信息和反馈信息,同时也可根据反馈数据重新对远程“慧鱼模型”发送控制信号,以实现对模型的正确控制。
1.2本课题的任务及要求
1)基于VB的加工中心远程控制程序(监控)。
2)基于VB远程控制的系统模拟。
1.3可行性分析
VB是Windows环境下简单、易学、高效的可视化编程语言开发系统,以其所见所得的可视化界面设计风格和面向对象的程序设计等特点,在人员开发实际的工程应用中得到了广泛的应用,是很多计算机软件开发的工具。
它不但提供了良好的界面开发环境,而且具有功能强大的通信控件MicrosoftCommunicationsControl(MSComm),提供了很强的串口通信能力。
VB中的MSComm控件的实用性强、功能完善,是实现计算机与外部设备数据交换的强有力工具。
该控件可设置用来发送和接收二进制数据或ASCII码数据,可对串口状态及串口通信的信息格式进行设置,实现对下位机地址和数据的接收和发送,达到多机通信的目的。
2数据交换
2.1串行通信(SerialCommunication)优势
计算机通信可以分为并行通信(ParallelCommunication)和串行通信(SerialCommunication)两种方式。
并行通信即多个数据位同时传输,传输速度快、效率高,但要求传输成本高,并且传输距离近,所以不适合大批量远距离传输。
串行通信虽然传输速度较慢,但以其传输成本低、距离远、实现简单等特点,在工业、通信、监控等方面得到了广泛的应用。
尤其是以单片机为终端,PC机为控制端的主从式计算机实时监控系统应用较多。
串行通讯技术具有简单且易实现的特性,在系统控制领域中一直扮演着极其重要的角色,它不仅没有被时代的进步而淘汰,反而在规格上越来越先进,应用也越来越广泛,成为计算机上的标准配置。
实验室和工业应用中,受信道成本限制,串口常常作为计算机与外部串行设备之间的首选数据传输通道,而且由于串行通信方便易行,许多设备和计算机都可以通过串口对外设进行控制、检测。
串口通讯日益成为计算机和外设进行通讯、获取由外设采集到的监测数据的一个非常重要的手段。
2.2计算机与设备的数据交换3个步骤
(1)设备要求传送数据时,计算机会传送一个字符串过去。
通常此字符串的第一个字符是所谓的前导码,设备借此前导码辨识是否应该读取此字符串以及用什么样的格式去解读此字符串。
前导码不会是一般的数字,通常是一些不可见的字符位于ASCII码的前30个或极少被使用的符号字符,目的在于避免数据字符与前导码一样而发生误判。
在前导码之后是站号,通常以两个字符代表,单纯以RS232连接的单一设备一般不需要站号.(设为00即可)。
(2)当设备收到要求字符串,并经判读确定后,便会送出计算机所要求的数据。
同样,数据被送出时会在其之前加上前导码与站号,计算机以此前导码和站号来判断数据来自何处。
(3)计算机接收到设备传送回来的字符串会进行解读检查动作。
当检查完成后,便再送一个确定的字符串给设备,用以说明计算机端已成功接收到字符串若传送失败,计算机也会再次传送字符串中要求设备传送的数据。
以上个步骤就是计算机与设备数据传送的一般情况。
不同的设备会有不同的数据传送程序,实际情况和步骤须参考设备的使用说明书,但它们的程序都很类似。
另外,数据传送时,一般都会加上校验码,来确认传送数据的正确性。
3慧鱼创意组合模型
3.1慧鱼创意组合模型
慧鱼创意组合模型是一种拼装类型的创新教学系统,它由机械构件、微型电机、传感器(光敏、热敏、磁敏、触敏等)、气动元件、电脑接口板及控制软件等组成,所有构件均采用优质的尼龙塑胶,采用燕尾槽插接方式连接,基本机械零件有连杆、链条、履带、齿轮、齿轴、齿条、蜗轮、蜗杆、弹簧等;基本电器元件包括直流电机、传感器、继电器、可调直流变压器等。
采用电脑控制模型时,采用ROBOPro编程。
按照功能不同,常见的慧鱼创意组合模型有传感器技术组(编号(30491)、机械与结构组(93291)、气动技术组(77791)、电子技术(90183)、简易机器人(18353)、工业机器人(96782)、气动机器人(34948)、移动机器人(96808)、仿生机器人(57486)。
慧鱼创意组合模型基本结构设计独特,六面都可拼接,可实现无限多的组合变化。
例如利用慧鱼创意模型的传感器技术组可实现自动烘手机、自动印号机、物体运送机、自动称重机、自动取款机、磁性物质分选机等模型;利用机械与结构组可实现塔式吊车、齿轮减速箱等模型;利用电子技术组可实现闪光灯、自动车库门等模型;利用简易机器人组可实现交通岗中可控制的红绿灯、自动移动门、温度控制器、冲压机等模型;利用工业机器人组可实现单轴焊接机器人、双轴焊接机器人、三自由度机械手等模型;利用气动机器人组可实现分别为发射机、自动滑行门、管道搬运车、挖掘机等模型;利用移动机器人组可实现寻找光源机器人、追踪轨迹机器人、躲避障碍机器人等模型。
慧鱼创意组合模型主要具有以下特点:
(1)组合性,所有底层设备模块可以任意构建组合;
(2)模块化,软、硬件都采用模块化设计,方便设计及调试;(3)可塑性,该系统可以反复拆建,随时可以修正设计缺陷,完成新的系统设计;(4)创新性,该系统给学生充分发挥创意的空间,锻炼学生的动手能力;(5)趣味性,用搭建积木的方式构建系统,提高了工作过程的趣味性,使学生体会到“在玩中学、在学中做、在做中学”的乐趣。
而且慧鱼模型涉及到机、电、控制、传感技术、计算机技术等多方面知识,可使学生得到跨学科综合能力的培养,进一步提高他们的创新能力和竞争能力。
学生通过想象、感觉、表达、改进模型的过程,促进创造力的成长,在培养自信心、耐心、独立自主能力及团队精神的同时,强调个性的发展。
因此,慧鱼创意组合模型在各类学校的教学过程中发挥了很大的作用。
3.2关于fischertehnik的接口板
3.2.1fischertehnik的接口板
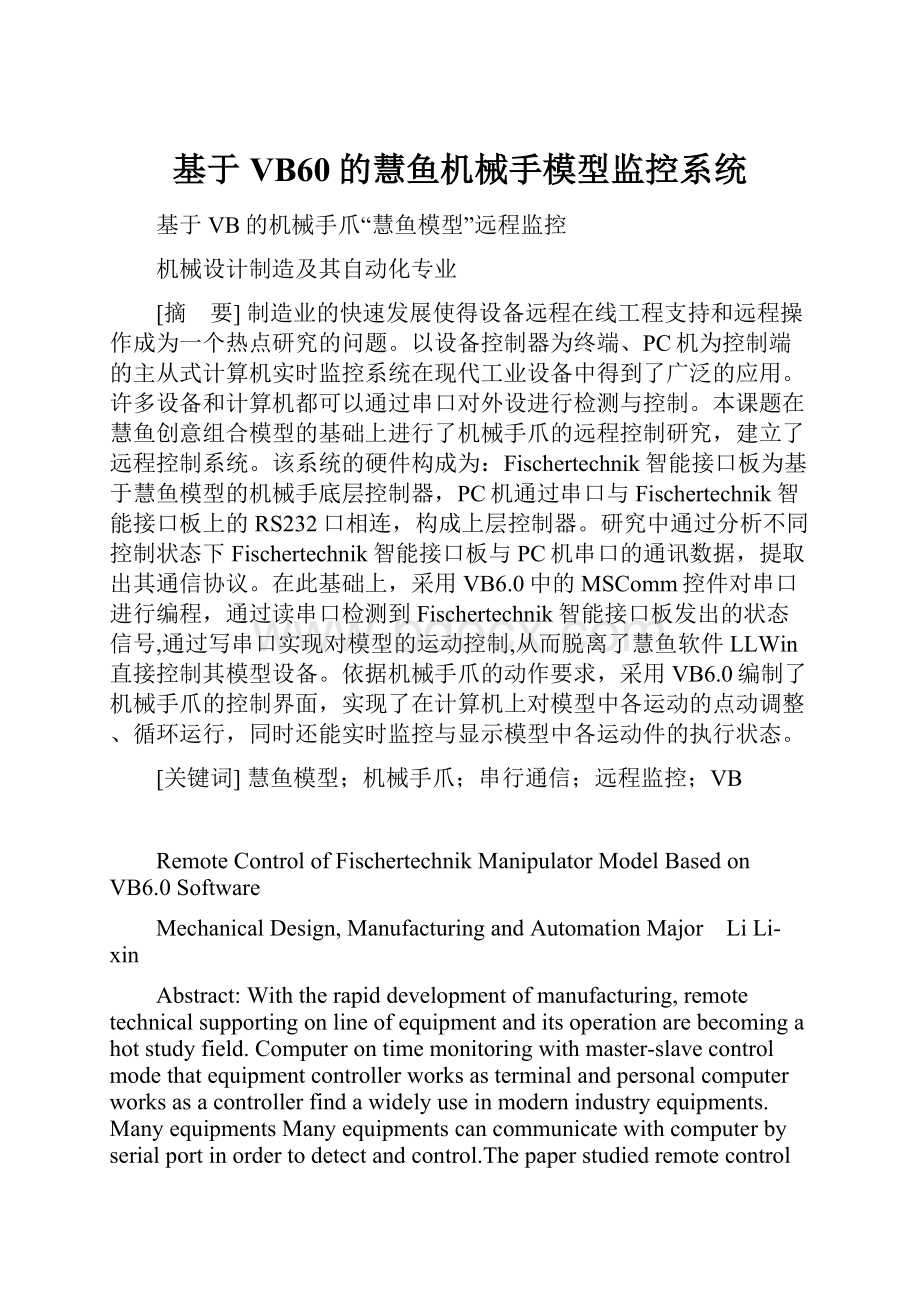
fischertehnik的接口板如图3.1所示
RS232
电源接口
E1~E2
E3~E8
EX~EY
图3.1fischertehnik的接口板
智能接口板是连接计算机与模型的接口,自带有微处理器,通过RS232串口连接到电脑的串口上(COM1或COM2),智能接口板的输入接收模型传感器传来的信号,输出则驱动模型中的马达运动,在电脑上对智能接口板进行编程可以控制模型运动以达到设计的控制要求。
数字量的输出主要通过M1~M4,可以连接4个马达(可正、反向),四个马达的控制数据是通过电脑串口传送的,每两位数据控制一个马达(开ö关,顺时针ö逆时针),因此一共有八位数据传送至接口板,必须在计算机内开辟缓冲区来保存所有马达的当前状态,输出字的每个位顺序传到DATA2OUT线上,输出开始于有效位(M)。
每当CLOCK线由低向高跳变时导致输出的这位移至接口的移位寄存器中,DATA-OUT又出现新的一位,于是CLOCK脉冲再产生,如此往复,直到8位全部移完。
数字量输入E1~E8是用来连接传感器(例如行程开关等)。
E1~E8的输入信号的读入方法与输出口输出控制方法相类似,仅转换方向相反。
一个LOADIN脉冲使得在输入口的数值传送至移位寄存器,然后在CLOCK脉冲控制下顺序送入计算机(E8是第一位待传送的,E1则是最后一位),这些位值在计算机内被重组。
模拟量输入EX和EY连接电位计或者是热光传感器。
模拟信号输入含两个单跳变电路,电阻作为电路的定时元件接至EX或EY。
电阻值越高,COUNTIN输出维持的低电平时间就越长。
在模拟信号输入中对应于特定的电阻,程序中计算循环的次数取决于处理器工作速度及软件速度。
电阻值与循环次数总是为线性关系。
3.2.2单片机硬件系统
fischertehnik的接口板是一个单片机系统。
单片机硬件系统是一个典型的信号采集系统,系统结构框图如图3.2所示。
PC机控制端先给单片机发送“开始指令”和有关系统测量参数,单片机接受到后硬件系统开始工作,进行数据采集,采集到的信号经放大和A/D变换后送入单片机,单片机把处理后的数据按每个字节为一棘整理成帧,然后通过RS232接口(RS232串行通信因为采用的设备简单,也比较容易实现,常被用于自动控制、数据采集、智能仪表等系统中PC机与外部设备的数据通信。
RS232接口分布图如图3.3所示)传到计算机。
计算机首先对单片机发过来的每一帧数据进行正确的接收,并对数据进行实时显示,然后再进行必要的处理,以达到实时监控的目的。
PC机也可以随时向单片机发送指令,使单片机根据指令的要求执行相应的动作。
图3.2单片机硬件系统结构框图
图3.3RS232接口分布图
4Mscomm控件
用VisualBasic6.0进行串行通信程序的设计有两种方式,一是直接调用WindowsAPI,另一种方式是使用通信控件,但后一种方式实际上是通过通信组件间接的调用了WindowsAPI函数,其过程要比直接调用API要复杂,但是在程序的实现上要比前一种方式简单的多。
4.1Mscomm控件介绍
4.1.1MSCOMM控件的主要属性
CommPort:
用于设置或返回通信连接端口号码。
Settings:
用于设置或返回初始化参数,即波特率、奇偶校验位、数据位和停止位。
PortOpen:
用于设置或返回返回通信连接端口的状态使用前必须将要使用的串行接口先行打开,而在使用完毕之后,也必须执行关闭操作.
Input:
用于从输入缓存区返回并删除字符程序靠该命令将对方传到输入缓存区中的字符读进来,并清除缓存区中已被读取的字符.在设计阶段时无效,运行阶段时为只读.
InputLen:
确定被Input属性读取的字符数.
Output:
用于将一个字符串写入输出缓存区.在设计阶段时无效,运行阶段时为只读.
InputMode:
用于设置或返回Input属性取回的数据形态.该属性值有0或1,分别对应文本形式或二进制式.
CommEvent:
在通信错误或事件发生时都会产生
OnComm事件,CommEvent属性存有该错误或事件的数值码.(这也是此控件唯一的事件).
InBufferCount:
用于返回在接收缓存区中的字符数。
属性在设计阶段无法使用,如果把该属性值设置为0,以清除接收缓存区.
4.1.2MSCOMM控件的事件
OnComm事件:
当CommEvent属性的值发生变化时,就触发此事件,标志发生了一个通信事件或错误,如果
CommEvent属性值发生了变化,而通信事件又未发生,就必然出现错误.CommEvent属性中含有触发OnComm事件的真正错误或事件的标识代码.
4.1.3MSCOMM控件进行串行通信的一般步骤
MSCOMM控件进行串行通信的一般步骤为:
1)设置通信对象通信端口号及其他属性;
2)设定通信协议;
3)打开通信端口;
4)进行数据的传送;
5)关闭通信端口.
4.1.4MSCOMM控件通信方式的选择
MSComm提供了两种处理通信问题的方法,一是事件驱动方法,一是查询法.
②事件驱动法
在使用事件驱动法设计程序时,每当有新字符到达端口状态改变,或发生错误时,MSComm控件将触发OnComm事件,而应用程序在捕获该事件后,通过检查MSComm控件的ommEvent属性可以获知所发生的事件或错误,从而采取相应的操作。
这种方法的优点是不需要一直让程序处于检查的状态,只要事先将程序代码写好,一有事件发生,就会执行相应的程序代码,响应及时,可靠性高.
②查询法
查询法适合于较小的应用程序,在这种情况下,每当应用程序执行完某一串行口操作后,将不断检查MSComm控件的CommEvent属性,以检查执行结果或检查某一事件是否发生。
查询方式实质上还是事件驱动,但在有些情况下,这种方式显得更为便捷。
在程序的每个关键功能之后,可以通过检查CommEvent属性的值来查询事件和错误。
如果应用程序较小,并且是自保持的,这种方法可能是更可取的。
4.2利用MSCOMM控件接收数据
利用MSCOMM控件的Input属性可以接收数据,Input属性从接收缓冲区中返回一串数据,它在设计阶段是无效的,在运行阶段也只能读,Input属性的返回类型为Variant.
InputLen属性用于指定由串行端口读入的字符串长度。
如果InputLen值为0(默认值),此值会使Input命令一次读取所有输入缓冲区中的数据.InputMode属性决定Input属性返回值的数据类型.如果InputMode的值设置为ComInputModeText,则可利用Input属性返回文本数据;如果InputMode的值设置为ComInputModeBinary,则返回Byte。
数组中的二进制数据.的示例程序是利用Input属性接收缓存中的数据:
PrivateSubCommand1_Click()
‘用户单击按钮Command1后读取输入缓冲区中的内容
DimInsasString
MSCOMM1.InputLen=0
MSCOMM1.PortOpen=True
Ins=MSCOMM1.input
Text1.text=Ins
MSCOMM1.PortOpen=False
EndSub
4.3用MSCOMM控件发送数据
MSCOMM控件提供了一个Output属性,它能简化对数据的发送Output属性可以往发送缓冲区中写入一串数据,它在设计阶段是无效的,在运行阶段也只能写入,其引用方法如下:
MSCOMM1.Output=Value
其中Value,参数表示一串要写入到发送缓冲区中的字符Output属性可以发送文本数据,也可以发送二进制数据.如果要发送文本数据Value,就必须是含有字符串的Variant数据;如果要发送二进制数据Value,就必须是含有Byte,数组的Variant数据.
下面的示例程序是利用
MSCOMM控件的Output属性发送数据:
PrivateSubText1_KeyPress(KeyAsciiAsInteger)
‘将键盘输入的值传递给Text1和MSCOMM1控件
imOutSasvariant
MSCOMM1.Commport=1
MSCOMM1.portOpen=True
OutS=Chr(KeyAscii)
MSCOMM1.Output=OutS
MSCOMM1.portOpen=False
EndSub
5控制实现的原理与方法
5.1监控对象
5.1.1监控对象慧鱼模型
机械手爪(如图5.1)在工作台之间行走,根据需要运行至具体位置,实现上料和下料具体动作。
E2
M2
M4
E3
M3
E5
M1
图5.1机械手爪
5.1.2机械手爪E端数字输入量与M端控制电机输出的相关动作
数字信号
作用
电机
相关动作
E1
启动
M1
手爪的左移及右移
E2
左限位
M2
手爪的上移及下移
E3
上限位
M3
手爪的前移及后移
E4
复位
M4
手爪的闭合及张开
E5
右限位
表5.1E端数字输入量与M端控制电机输出的相关动作
机械手爪工


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 VB60 机械手 模型 监控 系统
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《酒店人力资源管理》教案.docx
《酒店人力资源管理》教案.docx
-
《马克思主义基本原理概论》选择题复习题.docx
-
《全国100所名校示范卷》高三生物人教版西部卷一轮复习 第十五单元 《稳态与环境》综合检测.docx
-
《1吨有多重》教学设计反思及评点2篇.docx
-
《红飘带狮王》读书笔记.docx
-
《教综》真题答案.docx
-
《企业管理》复习题发学生.docx
-
《提高数学学困生的学习兴趣研究》课题工作总结报告.docx
-
《蟋蟀的住宅》的教学设计.docx
-
《园林建筑设计》教案.docx
-
《中西医结合内科学》精华笔记.docx
-
2三轴向加速度传感器长春汽车工业高等专科学校.docx
-
04装修工程施工合同.docx
-
5套打包四年级数学上期中考试单元综合练习题含答案解析.docx
-
《食品安全法》知识竞赛题目及答案.docx
-
《24式简化太极拳》简案.docx
-
《金融理论与实务》复习大纲.docx
-
《旅游地理》学案.docx
-
《企业集团财务管理》综合练习题参考答案11春.docx
-
《实践论》原文毛泽东.docx
-
《项目管理软件》课程复习题.docx
-
《员工手册》电子版范文.docx
-
《中小学布局整改措施》.docx
-
5旋风分离器安装.docx
-
10kV跨越架搭设施工方案设计.docx
-
#市关爱儿童服务中心暨救助站改造工程项目建议书.docx
-
《毛概》课程标准.docx
-
《人民日报》学习贯彻党的十七届四中全会精神系列.docx
-
《我的军训生活》作文800字.docx
-
《研发人员绩效考核奖励办法》.docx
-
1 《道路交通安全法》规定任何单位或者个人不得收缴机.docx
-
02电气检修规程.docx
-
1散步教案.docx
-
2钢筋作业指导书.docx
-
液氨储罐区安全检查标准待审稿.docx
-
一二九运动演讲稿大全与一二九运动演讲稿范文汇编.docx
-
5篇广东东部华侨城的导游词导游词.docx
-
09年秋期地域文化课程期末复习指导.docx
-
15成人药剂《药品生产质量管理》复习题.docx
-
一年级语文阅读训练专项习题.docx
-
医疗机构执业许可证校验空白本.docx
-
医学名称错词库doc.docx
-
医院护工管理.docx
-
220kV架空线路强条执行记录表.docx
-
512护士发言稿.docx
-
4136砌石基础及毛石挡墙护坡施工措施技4136.docx
-
英文演讲稿如何减肥.docx
-
英语短语固定结构.docx
-
小型配料搅拌装置电气系统设计毕业论文最终完成版本解析.docx
-
医技科室医疗质量绩效考核评分表.docx
-
主治医师考试中药学笔记完整版.docx
