 两自由度系统的振动.docx
两自由度系统的振动.docx
- 文档编号:23654510
- 上传时间:2023-05-19
- 格式:DOCX
- 页数:24
- 大小:647.39KB
两自由度系统的振动.docx
《两自由度系统的振动.docx》由会员分享,可在线阅读,更多相关《两自由度系统的振动.docx(24页珍藏版)》请在冰豆网上搜索。
两自由度系统的振动
第5章两自由度系统的振动
应用单自由度系统的振动理论,可以解决机械振动中的一些问题。
但是,工程中有很多实际问题必须简化成两个或两个以上自由度,即多自由度的系统,才能描述其机械振动的主要特征。
多自由度系统的振动特性与单自由度系统的振动特性有较大的差别,例如,有多个固有频率、主振型、
主振动和多个共振频率等。
本章主要介绍研究两自由度系统机械振动的基本方法。
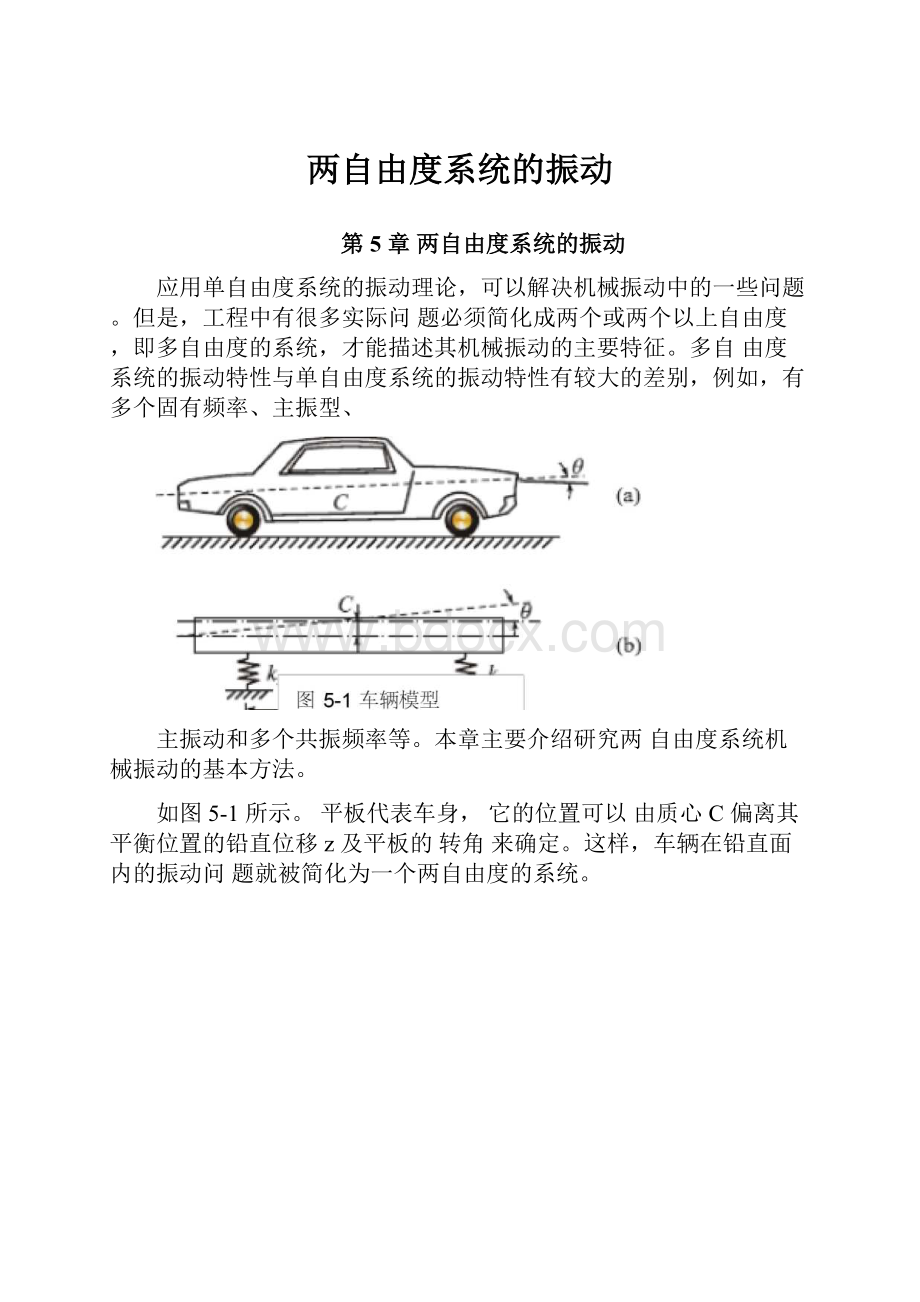
如图5-1所示。
平板代表车身,它的位置可以由质心C偏离其平衡位置的铅直位移z及平板的转角来确定。
这样,车辆在铅直面内的振动问题就被简化为一个两自由度的系统。
5.1双质量弹簧系统的自由振动
5.1.1运动微分方程
5.1.2
图5-2两自由度的弹簧质量系统
图5-2(a)表示两自由度的弹簧质量系统。
略去摩擦力及其它阻尼,以它们各自的静平衡位置为坐标x1、x2的原点,物体离开其平衡位置的位移用x1、x2
表示。
两物体在水平方向的受力图如图5-2(b)所示,
由牛顿第二定律得
m1x1(k1k2)x1k2x20
m2x2k2x1k2x20
(5-1)
(5-2)
这就是两自由度系统的自由振动微分方程。
习惯上写成下列形式x1ax1bx2x2cx1dx2
显然此时
5.1.3固有频率和主振型
根据微分方程的理论,设方程(5-2)的解,即两自由度无阻尼自由振动系统的解为x1A1sin(pt)
(5-3)
11
x2A2sin(pt)或写成以下的矩阵形式
(5-4)
x1A1
sin(pt)
x2A2
将式(5-4)代入式(5-2),可得代数齐次方程组
展开后为
(5-6)
p4(ad)p2adbc0
式(5-6)唯一确定了频率p满足的条件,通常称为频率分程或特征方程。
它是p2的二次代数方程,它
的两个特征根为
(5-7)
由于式(5-7)确定的p2的两个正实根仅取决于系统本身的物理性质,与运动的初始条件无关,因此p
称为系统的固有频率。
较小的一个称为第一阶固有频率,较大的一个称为第二阶固有频率。
5.2.2主振型
将固有频率p1和p2分别代入式(5-5)的任一式,可得到对应于它们的振幅比
以上二式说明,虽然振幅的大小与振动的初始条件有关,但当系统以任一阶固有频率作同步谐振动
时,振幅比却和固有频率一样只决定于系统本身的物理性质。
同时联系到式(5-3)不难看出两个质量
其它各点的位移则都可以由x1和x2所决定。
这样在振动过程中,系统各点位移的相对比值都可由振
p1对应的振幅比1
幅比确定。
也就是说,振幅比决定了整个系统的振动形态,因之称为主振型。
与称为第一阶主振型,与p2对应的振幅比2称为第二阶主振型。
将式(5-7)中的p1、p2之值带入式(5-8),得
ad2
2
(5-10)
(5-12)
(5-13)
第二阶主振动为
x1
(2)A1
(2)sin(p2t2)
x2
(2)A2
(2)sin(p2t2)2A1
(2)sin(p2t2)
可见系统作主振动时,各点同时经过平衡位置和最大偏离位置,以确定的频率和振型作简谐振动。
但必须指出,并非任何情况下系统都可能作主振动。
(5-1)的通解,是它的两个主振动的线性
根据微分方程理论,两自由度系统的自由振动微分方程
组合,即
x1(t)x1
(1)x1
(2)A1
(1)sin(p1t1)A1
(2)sin(p2t2)
(1)x
(2)
22
x2(t)x2
(1)x(22)1A1
(1)sin(p1t1)2A1
(2)sin(p2t2)
上式可以写成如下的矩阵形式,即
x1x2
in(p1t1)
A1
(2)
2A1
(2)
sin(p2t2)
(5-14)
式中A1
(1),A1
(2),1,2由运动的初始条件确定。
所以一般情况下,系统的自由振动是两个不同频率
的主振动的叠加,其结果不一定是简谐振动。
例5-1试求图5-3(a)所示两个自由度系统振动的固有频率和主振型。
已知各弹簧的弹簧常量k1
=k2=k3=k,物体的质量m1=m,m2=2m。
解:
(1)建立运动微分方程式分别以两物体的平衡位置为坐标原点,取两物体离开其平衡位置的距离x1、x2为广义坐标,两物体沿x方向的受力图如图5-3(b)所示,它们的运动微分方程分别为
mx12kx1kx202mx2kx12kx20若写成(5-2)的标准形式,则
2kka,b,mm
所以
2
p1,2
ad
图5-3两自由度系统
a2dbc
k
c
2m
3k
2m
2m
)2
k2
2m2
3k3k
2m2m
k
解出,p120.634k,
m
2k
p222.366k。
因此,系统的第一阶和第二阶固有频率为m
p1
0.634k
m
p2
2.366k.
(3)求主振型
将p12、p22分别代入式(5-26),得
图5-4振型图
A2
(1)
1A12
(1)
A2
(2)
2A1
(2)
2
ap11
b0.732
2
ap21
b2.732
主振型为
系统的振型图如图5-4所示。
图(a)表明在第一主振型中二物体的振动方向是相同的;图(b)表明
在第二主振型中二者的振动方向是反相的,并且弹簧上的A点是不动的,这样的点称为节点。
例5-2在图示5-3所示系统中,已知m1m2m,k1k3k,k24k,求该系统对以下两组初始条件的响应:
(1)t=0,x10=1cm,x20x10x200;
(2)t0,x101cm,
解:
系统的的运动微分方程分别为
mx15kx14kx20
mx24kx15kx20
若写成(5-2)的标准形式,则
5k4kad,bc
mm
所以
解出,p12k,p229k。
mm
对应的两个主振型为
将初始条件
(1)代入式(5-10),解得
x10A1
(1)sin1A1
(2)sin21x201A1
(1)sin12A1
(2)sin20x10A1
(1)p1cos1A1
(2)p2cos20x20A1
(1)1p1cos1A1
(2)2p2cos20
所以
x1(t)cosp2tcos3t(cm),x2(t)cosp2tcos
图5-5双摆拍振
程,当1、2角位移很小时,得到摆做微小振动的微分方程
ml21mgl1ka2(21),ml22mgl2ka2(21)
用与前面类似的分析方法,得到系统的第一阶和第二阶固有频率为
m
系统的第一阶和第二阶主振型为
于是得到第一主振动
1
(1)
(1)sin(p1t1),2
(1)
(1)sin(p1t1)
第二主振动
1
(2)
(2)sin(p2t2),2
(2)
(2)sin(p2t2)
在任意初始条件下,系统振动的一般解
11
(1)1
(2)
(1)sin(p1t1)
(2)sin(p2t2)
2(21)(22)
(1)sin(p1t1)
(2)sin(p2t2)
如果初始条件是:
t=0时,1(0)0,2(0)1(0)2(0)0,代入上式得到
因此得到双摆作自由振动的规律
如果弹簧的刚度k很小,即
这时p1,p2相差很少,将上式写成
p2p1
令Δpp2p1pa21则上式为
2
这表明,两个摆的运动可以看作是频率为pa的简谐运动,但其振幅不是常数,而是缓慢变化的简谐函数0cosΔpt和0sinΔpt,这种现象称为拍振。
22
就是
称为拍的周期。
由于Δp较小,所以拍的周期一般较长。
此外,两个拍振之间相位角差为说,当t=0时,左边的摆以0开始摆动,右边的不动;随后,左边摆的振幅逐渐减小,右边摆的振
11
幅逐渐增大。
当tTB时,左边的摆停止,右边的摆达到0,再经过TB,即tTB时,右边的
22
摆停止,左边的摆达到0。
这种循环,每隔一个拍振周期重复一次。
可以看到,两个摆的动能也从
一个摆传递到另一个摆,循环传递,使它们持续地振动。
图5-6双摆拍振1cos0.05tcos2.05t,2sin0.05tsin2.05t的时间历程
5.3坐标的耦联
5.3.l耦联与非耦联
如前所述,一般情况下两自由度系统的振动微分方程组的形式为
x1ax1bx20
x2cx1dx20
可见在质点m1和m2的运动方程式中,都含有坐标x1和x2。
这表明,两个质点的运动不是互相独立的,它们彼此受另一个质点的运动的影响。
像这样表示振动位移的两个以上坐标出现在同一个运动方程式中时,就称这些坐标之间存在静力耦联或弹性耦联。
另外,与上式情况不同,当一个微分方程式中出现两个以上的加速度项时,称为在坐标之间有
动力耦联或惯性耦联。
某个系统中是否存在耦联取决于用以表示运动的坐标的选择方法,而与系统本身的特性无关。
一般说来,为了表示多质点系的运动状态,可以选用的独立坐标系,即广义坐标,可能有几种。
根据选择坐标的不同,系统可以是静力耦联,动力耦联、静力兼动力耦联,或非耦联的(即完全无耦联的)。
5.3.2主坐标
q1(t),q2(t)为广义坐标可写成如
(A)
从上一节的分析可以知道,两质点无阻尼系统的运动方程式以下最一般的形式
M11q1M12q2K11q1K12q20
M21q1M22q2K21q1K22q20
式中Mij和Kij(i≠j)分别表示动力和静力耦联项。
然而,如果坐标选择得当,可使式(A)中的耦联项为Mij=0,Kij=0(i≠j)。
即总是可以使微分方程式不联立,在每个式子中分别只含一个未知数而与另一未知数无关。
如果能得到这种独立的运动方程式,则作为方程解求出的系统各个分量的运动与其它各分量的运动无关,分别作具有各自固有的振幅、频率和相位的单自由度振动,即谐和振动,问题就大大简化了。
主坐标。
这种经特别选择的、可使方程式写成既无动力耦联又无静力耦联形式的坐标称为
例5-7试由双摆作微小摆动的微分方程,寻求系统的主坐标。
解:
双摆作微小摆动的微分方程为
1(gka22)1ka2220
lmlml
将以上两式相加、相减便得到
令112,212,上式变为
1g10
1l1
2(gka2)20
2lml22可见,1,2就是系统的主坐标,所以该系统的两个固有频率为
5.4双质量弹簧系统的受迫振动
在图5-3所示的两自由度系统力学模型中,若两个物块受到激振力的作用,F1(t)F1sint,F2(t)F2sint,可列出该系统的受迫振动微分方程,其矩阵形式为
m1x1(k1k2)x1k2x2F1sint
m2x2k2x1(k2k3)x2F2sint
则得
代入原方程组后得
(a)B1bB2f1
cB1(d2)B2
(5-17)
由此解出受迫振动的振幅
则得到
应的主振型。
振动测量中常利用这一规律来测量系统的固有频率,并根据共振时系统的振动形态来判断该固有频率的阶次。
例图5-3所示系统中已知各弹簧的弹簧常量k1=k2=k,k32k;物体的质量m1=m,m2=
2m。
若在质量m1上作用一激振力F1(t)F1sint而F2(t)0。
(1)
故系统的响应为
k)(红色)和无量纲频率p之间的关系曲线表明有两次共振。
每次共振时,两个质量块的振幅都同时达到最大值。
当激励频率为3k2m时,m1的振幅为零,这种现象通常称为反共振。
当激励频率3k2m时,两个质量块的运动方
向相同;当激励频率3k2m时,两个质量块的运动方向相反。
当p2时,两个质量块的振幅都非常小而趋于零。
5.5动力减振器
上节已经指出,对一个两自由度系统,当其中的一个质量块受到外界激励时,它却有可能不动而使另一个质量块运动。
根据这个原理,可以制成工程上常用的动力减振器。
图5-8所示梁上装有一电动机,运转时由于转子的偏心而诱发强迫振动。
这可用质量为m1、弹
簧刚度为k1的单自由度系统的受迫振动来描述。
在某一确定的电机转速下可能由于共振而引起强烈振动。
为此在梁上附加一个质量为m2、弹簧刚度为k2的弹簧质量系统,从而构成了一个两自由度
的系统。
a)
b)
图5-8动力减振器
F1sint
根据上节的讨论,此系统的振动微分方程为:
m1x1(k1k2)x1k2x2
m2x2k2x1k2x20
其强迫振动的振幅为
(d2)f1
B12
(2)
cf1
B212
2
(2)
式中
不难看出,当2d
(2)(a2)(d2)bc,k1k2k2
a,b
m1
m1
ck2d,f1m2
F1
m1
k2时,
m2
B10
f1
B21
2b
F1
这就是说,主系统不动而减振器以
k2
F1
x2B2sint1sint作受迫振动。
减振器弹簧在下端受到
22k2
的作用力为
k2x2F1sint在任何瞬时,都与激振力F1sint相平衡,因此使主系统的振动转移到减振器上来。
图当k2m21,m21时无量纲振幅B1和无量纲频率之间的关系曲线。
k1m1m1(F1k1)(k2m2)
5-9给出了
m2)1时,B1
动,而是以较小的振幅振动。
此外还可以看出在
由曲线可以看出,当
(Fk)0。
当考虑系统的阻尼时,主系统不是完全不
k2m2附近有两个共振峰值。
如果m2、k2选
择不当,可能引起新的共振。
为此必须控制附加动力减振器后的两自由度系统的固有频率。
5.6阻尼对强迫振动的影响
为了把问题简化,以上的分析都没有考虑系统的阻尼。
本节以图5-10所示系统为例,讨论阻尼对两自由度系统受迫振动的影响。
这个系统是在上节的动力减振器的两个质量块之间增加一个阻尼
器而成。
其运动微分方程为
m1x1(k1k2)x1k2x2c(x1x2)F1sintm2x2k2x1k2x2c(x1x2)0
(5-20)
仍只考虑稳态运动。
若利用复指数形式,则激振力为F1ejt,而
稳态运动的形式为x1B1ej(t1)x2B2ej(t2)
(5-21)
将(5-21)代入(5-20)后可解出B1、B2。
下面只以主质量m1的
振幅B1进行讨论。
其无量纲表达式为
B1
F1
k1
(22)2
(2)2
[22(21)(22)]2
(2)2(212)2
式中
(5-22)
m2
m1p01,cc,c2m2p01
B
可见对于确定的和,无量纲振幅1是和的函数,这与单自由度受迫振动的情况一样。
(F1k1)
p02
p01
2
p01
2p02
图5-10有阻尼的双弹簧质量系统
图5-11对应1和1的幅频特性曲线。
0为无阻尼的情况;相当于m1和m2刚性连
20
接,所以幅频特性曲线与单自由度受迫振动的幅频特性曲线相同。
不难看出,阻尼会使共振附近的振幅显著减小,但激振频率p1或p2时,阻尼对振幅的影响很小。
此外,(5-22)所代表的
响应曲线,无论的值如何都通过S与T两点。
这表明对于这两点对应的频率,主质量的振幅与阻尼无关。
图5-11考虑阻尼时动力减振器的幅频特性曲线


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自由度 系统 振动
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《公务员财产申报制度》.docx
《公务员财产申报制度》.docx
-
《儿童口腔病学》汇总题库集.docx
-
《建筑施工组织与管理》教案教学内容.docx
-
《班委选举细则》.docx
-
《光伏组件监造技术标准》.docx
-
《年终表彰大会讲话稿 表彰大会致辞稿》.docx
-
《听颖师弹琴》《李凭箜篌引》分别鉴赏及对比鉴赏加练习人教版高一选修.docx
-
《鹬》分镜头脚本.docx
-
5套打包宜昌市小学四年级语文上期中考试单元测试题及答案.docx
-
16开纸田字格word字帖模板.docx
-
315食品安全活动策划书.docx
-
CFG桩基础施工方案详解.docx
-
08人机工程学中英文资料外文翻译文献.docx
-
《读古典名著口百味人生》获奖精品省优获奖教案 部编版语文精品.docx
-
《功课很重要》教案1学习资料.docx
-
《冷拼工艺》教案.docx
-
《唐人街探案3》电影观后感《唐人街探案3》心得作文5篇.docx
-
《C语言程序设计》习题.docx
-
《幼儿园课程游戏化的实践研究》.docx
-
4现场管理档案.docx
-
13级西医专业基础综合测评答.docx
-
100部校园电影全.docx
-
CAD制图标准.docx
-
《分数除法一.docx
-
edb72192ac02de80d4d8d15abe23482fb5da0291.docx
-
H236车联网资料路尚行业版OMP操作手册服务商0618.docx
-
jarlasscon门机.docx
-
《百分百责任学习心得》.docx
-
《管理学基础》习题18章单凤儒.docx
-
《旅游专业日语》课程实施方案.docx
-
《铁路旅客运输服务》学习指导书.docx
-
《预算会计》课程标准.docx
-
吴作人美校高一地理月考试题3.docx
-
五年级数学上计划.docx
-
水作文之给水厂毕业设计总结.docx
-
司机工作总结存在的问题和不足最新版.docx
-
五年级英语下册期末复习题1精通英语.docx
-
思品期中复习资料汇总.docx
-
武术兴趣小组教案集.docx
-
四川省达州市大竹县文星中学届高三语文月考试题doc.docx
-
物料提升机应急预案与物料提升机搭安全拆除方案汇编.docx
-
四川省遂宁市射洪中学学年高二上学期期末教学水平监测地理试题及答案.docx
-
物流配送中心在实施电子商务中的作用.docx
-
物业管理年度个人工作总结.docx
-
四川省盐边县学年八年级英语下学期期中考试试题 人教新目标版.docx
-
四年级家长会发言稿范例.docx
-
四年级上册数学教案新人教版全册.docx
-
四年级数学下册期中试题及答案必考题二篇.docx
-
苏教版三年级下册语文教学反思.docx
-
苏教版小学语文三年级下册单元试题 全册 1综述.docx
-
苏教版语文第九册第一单元教学设计.docx
