 矿区地面控制测量.docx
矿区地面控制测量.docx
- 文档编号:23639078
- 上传时间:2023-05-19
- 格式:DOCX
- 页数:11
- 大小:41.96KB
矿区地面控制测量.docx
《矿区地面控制测量.docx》由会员分享,可在线阅读,更多相关《矿区地面控制测量.docx(11页珍藏版)》请在冰豆网上搜索。
矿区地面控制测量
矿区地面控制测量
第一节一般规定
各矿井必须建立满足矿井建设、生产需要的地面基本控制网或近井网。
平面控制网的坐标系统,应在满足测区内投影长度变形不大于2.5cm/km的要求下,采用统一的高斯投影3°带平面直角坐标系统。
宜采用北京54坐标系统、西安80坐标系统或者矿区独立坐标系统。
矿区的高程系统,宜采用1985国家高程基准。
矿区地面平面控制网可采用GPS网和导线网等布网方法建立。
矿区地面高程控制网可采用水准测量、三角高程测量或者全站仪三角高程水准式观测方法建立。
高程控制网精度达到四等水准以上精度。
为了保证测绘成果的质量,对测绘仪器、工具应加强管理,精心使用,定期检验、校正与维修。
在进行重要测量工作前,应对所使用的仪器、工具检验和校正。
第二节平面控制测量
矿区平面控制测量采用GPS网形式布网时应符合以下规定:
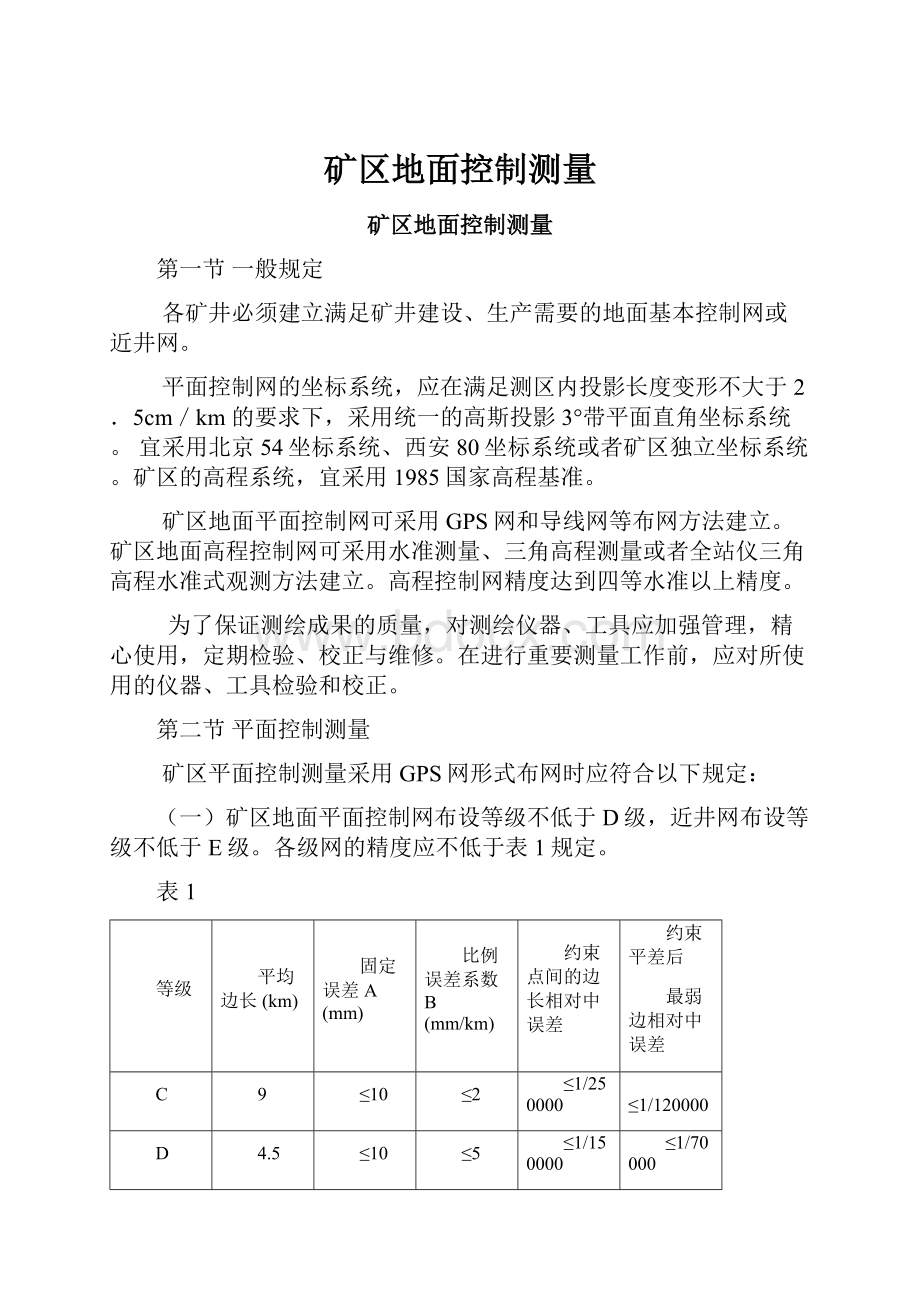
(一)矿区地面平面控制网布设等级不低于D级,近井网布设等级不低于E级。
各级网的精度应不低于表1规定。
表1
等级
平均边长(km)
固定误差A(mm)
比例误差系数B(mm/km)
约束点间的边长相对中误差
约束平差后
最弱边相对中误差
C
9
≤10
≤2
≤1/250000
≤1/120000
D
4.5
≤10
≤5
≤1/150000
≤1/70000
E
2
≤10
≤10
≤1/100000
≤1/40000
一级
1
≤10
≤20
≤1/40000
≤1/20000
二级
0.5
≤10
≤40
≤1/20000
≤1/10000
(二)测量的仪器的选定应按表2规定执行。
表2
级别
C
D、E
单频/双频
双频/全波长
双频或单频
观测量至少有
L1、L2载波相位
L1载波相位
同步观测接收机数
≥3
≥2
(三)GPS网测量采用中误差作为精度的技术指标,以2倍中误差作为极限误差。
(四)GPS测量观测的基本技术规定应符合表4的要求。
表4
项目
级别
C
D
E
卫星截止高度角/(°)
15
15
15
同时观测有效卫星数
≥4
≥4
≥4
有效观测卫星总数
≥6
≥4
≥4
观测时段数
≥2
≥1.6
≥1.6
时段长度
≥4h
≥60min
≥40min
采样间隔/S
10〜30
5〜15
5〜15
注1:
计算有效观测卫星总数时,应将各时段的有效观测卫星数扣除其间的重复卫星数.
注2:
观测时段长度,应为开始记录数据到结束记录的时间段。
注3:
观测时段数>1.6,指釆用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60%,
注4:
采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和。
(五)GPS测量数据处理应按照以下要求:
(1)C、D、E级GPS网基线解算可釆用随接收机配备的商用软件(如天宝的TBC)。
C、D、E级GPS网以适当数量和分布均匀的A、B级GPS网网点的坐标和原始观测数据为起算数据。
各种起算数据应进行数据完整性、正确性和可靠性检核。
(2)外业数据质量检核:
同一时段观测值的数据剔除率不宜大于10%;采用点观测模式时,不同点间不进行重复基线、同步环和异步环的数据检验,但同一点不同时段的基线数据应进行各种数据检验。
C、D级GPS网基线处理,复测基线的长度较差ds。
应满足以下公式的规定:
ds≤2
σ式中:
σ基线测量中误差,单位为毫米(mm);
C、D级GPS网外业基线处理结果,其独立闭合环或附合路线坐标闭合差和各坐标分量闭合差(Wx、Wy、Wz)应满足以下公式的规定。
Wx
Wy
Wz
式中:
n——闭合环边数。
σ——相应级别规定的精度(按实际平均边长计算)。
Ws=
(3)基线向量解算:
起算点的单点定位观测时间,不宜少于30min,解算模式可采用单基线解算模式,也可采用多基线解算模式。
解算成果,应采用双差固定解。
(4)重测和补测
未按施测方案要求,外业缺测、漏测,或数据处理后,观测数据不满足表4的规定时,有关成果应及时补测。
允许舍弃在复测基线边长较差、同步环闭合差、独立环或附合路线闭合差检验中超限的基线,而不必进行该基线或与该基线有关的同步图形的重测,但应保证舍弃基线后的独立环所含基线数满足。
(5)GPS网无约束平差
在基线向量检核符合要求后,以三维基线向量及其相应方差一协方差阵作为观测信息,以一个点在2000国家大地坐标系中的三维坐标作为起算依据,进行无约束平差。
无约束平差应输出2000国家大地坐标系中各点的三维坐标、各基线向量及其改正数和其精度。
无约束平差中,基线分量的改正数绝对值(
、
、
)应满足以下公式的要求。
≤3σ
≤3σ
≤3σ
式中:
σ基线测量中误差,单位为毫米(mm)
(6)GPS网约束平差
利用无约束平差后的观测量,应选择在2000国家大地坐标系或矿区独立坐标系中进行三维约束平差或二维约束平差。
平差中,对已知点坐标、已知距离和已知方位,可以强制约束,也可加权约束。
平差结果应包括相应坐标系中的三维或二维坐标、基线向量改正数、基线边长、方位、转换参数及其相应的精度。
约束平差中,基线分量改正数与经过粗差剔除后的无约束平差结果的同一基线,相应改正数较差的绝对值(
、
、
)应满足以下公式的要求。
≤2σ
≤2σ
≤2σ
式中:
σ基线测量中误差,单位为毫米(mm)
矿区地面控制网可采用导线网形式布网应符合以下规定:
(一)导线的布设精度应符合表5规定。
表5
等级
附(闭)合
导线长度
(km)
一般边长
(km)
测距相对
中误差
测角中误差
导线全长
相对闭合差
一级导线
二级导线
5
3
0.5
0.25
1/30000
1/20000
±5
±7
1/20000
1/10000
(二)导线水平角观测必须采用全站仪;导线测量水平角观测的技术要求应符合表6规定;水平角的观测限差应不超过表7的规定。
表6
等级
测角中误差
(″)
测回数
方位角最大闭合差(″)
1″级全站仪
2″级全站仪
一级导线
二级导线
±5
±7
4
2
4
2
±10
±14
注:
n为测站数
表7
仪器级别
一测回内2C
互差(″)
同一方向值各
测回互差(″)
1″级全站仪
2″级全站仪
9
13
6
9
(三)观测工作结束后,应及时整理和检查外业观测手薄中所有计算是否正确,观测成果是否满足各差项限要求,确认观测成果全部满足要求后,方可进行计算。
(四)采用电子计算机计算时,计算程序必须经过手算验证,否则应对使用计算程序的数学模型、计算精度、输出项目等进行严格审查,确认无误后方可采用。
在进行平差计算时,对数据的输入应进行仔细核对,对计算结果亦应进行检校。
打印输出的平差结果中,应列有起始数据和观测数据以及必要的中间结果。
第三节高程控制测量
高程控制采用水准测量时应符合以下规定:
(一)矿区地面高程首级控制网,一般应采用水准测量方法建立,其布设范围和等级选择,应符合表8的规定。
表8
矿区长度(km)
首级控制
加密控制
>25
5-25
<5
三等水准
四等水准
等外水准
四等水准、等外水准
等外水准
—
(二)矿区地面高程首级控制网应布设成环形网,加密时宜布设成附合路线或结点网,只有在山区或丘陵地带,才允许布设水准支线。
各等级水准网中最弱点的高程中误差(相对于起算点)不得大于±2cm。
(三)水准网的主要技术要求,应符合表9的规定。
表9
等级
每公里高差中数中误差(mm)
环线或附合路线长度
(km)
仪器
级别
水准
标尺
观测次数
往返互差、环线或附合路线闭合差
与已知点联测
附合或环线
平地
(mm)
山地
(mm)
三
等
±6
50
DS1
因瓦
往返各一次
往一次
±12
±4
DS3
木质
双面
往返各一次
往返各一次
四
等
±10
15
DS3
木质
双面
往返各一次
往一次
±20
±6
等
外
±20
5
DS3
木质双或单面
往返各一次
往一次
±40
±12
注:
1、计算两水准点往返测互差时,L为水准点间路线长度km;计算环线或附合路线闭合差时,L为环线或附合路线总长度(km);2、n为测站数;3、水准支线长度不应大于相应等级附合路线长度的1/4。
(四)水准测量观测的技术要求应符合以下要求。
测站的视线长度(仪器至标尺距离)、前后视距差、视线高度、数字水准仪重复测量次数按表10规定执行。
表10
等级
仅器类别
视线长度
前后视距差
任一测站上前后视距差累积
数字水准仪
重复测量次数
三等
DS1、DS05
≤100
≤2.0
≤5.0
≥3次
四等
DS1、DS05
≤150
≤3.0
≤10.0
≥2次
注:
相位法数字水准仅重复测量次数可以为上表中数值减少一次。
所有数字水准仪,在地面变动较大时,应皆时停止测量,直至动消失,无法回避时应随时增加重复测量次数。
(五)每完成一条水准路线的测量,应进行往返测高差不符值及每千米水准测量偶然中误差
的计算(测段数不足20个的路线,可纳入相邻路线一并计算)。
每千米水准测量偶然中误差
按式
(1)计算:
式中:
—测段往返测高差不符值,単位为毫米(mm);
R—测段长度,单位为千米(km);
n—测段数。
(六)每完成一条附合水准路线成闭合环线的测量,并对观测高差施加两项改正后,计算附合路线或闭合环线的闭合差W,当构成水准网的水准环超过20个时,还应按环闭合差W计算毎千米水准测量全中误差
。
每千米水准测量全中误差
按式
(2)计算:
式中:
W—经历各项改正后的水准环闭合差,单位为毫米(mm);
F—水准环线周长,单位为千米(km);
N—水准环数;
(七)水准测量的内业计算取位应符合表11规定。
表11
等级
往(返)测距离总和(km)
往返测距离中数(km)
各测站高差(mm)
往(返)测高差总和mm)
往返测高差中数(mm)
高程
(mm)
三、四等
四等以下
0.01
0.01
0.1
0.1
0.1
1.0
1.0
1.0
1.0
10.0
1.0
10.0
高程控制采用全站仪三角高程“水准式”观测法进行时,应满足四等水准技术要求,在观测过程中,必须按照以下作业程序进行:
(一)观测中前、后视距L≤200m,视距差△L≤30m,测段累积差≤100m,垂直角A≤20°;
(二)测前、后视高差采用正倒镜观测,测距加入温度、气压和加常数、乘常数改正;
(三)前后视对中杆测前进行比测,控制其达到等高;
(四)观测程序采用后-后-前-前作业程序,每测段采用往返观测;
(五)观测中采用偶数站上控制点的观测方法;
(六)为减少大气折光误差,观测视线距离地面1m以上;
(七)往返测段、闭合线路闭合差△H≤20
,M△<5.0mm,MW<10mm。
高程控制采用三角高程测量时应符合以下要求:
(一)矿区地面各级平面控制点的高程;可采用三角高程测量方法测定,并按四等水准测量的要求联测。
控制点高程和起算点高程都必须布设成三角高程网或高程导线。
(二)三角高程一般应进行对向观测。
倾斜角的观测,宜选择在中午前后有利的条件下进行。
(三)三角高程测量的技术要求应符合表12规定。
表12
等级
每千米高差全中误差(mm)
边长(km)
观测方式
对向观测髙差较差(mm)
附合或环形闭合差(mm)
四等
10
≤1
对向观测
40
20
五等
15
≤1
对向观测
60
30
注:
1、D为测距边的长度(km)。
2、起讫点的精度等级,四等应起讫于不低于三等水准的高程点上,五等应起讫于不低于四等的高程点上。
3、路线长度不应超过相应等级水准路线的长度限值。
(四)三角高程观测的主要技术要求,应符合表12-1的规定。
表12-1
等级
垂直角观测
边长测量
仪器精度等级
测回数
指标差较差
测回较差
仪器精度等级
观测次数
四等
2"级仪器
3
≤7"
≤7"
10mm级仪器
往返各一次
五等
2"级仪器
2
≤10"
≤10"
10mm级仪器
往返各一次
注:
当采用全站仪进行垂直角观测时,应根据仪器的垂直角检测精度,适当增减测回数。
(五)仪器高和觇标高应在观测前后用钢尺丈量各量测次,当互差不大于5mm时,取其平均值作为最终结果。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 矿区 地面 控制 测量
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《公务员财产申报制度》.docx
《公务员财产申报制度》.docx
-
《儿童口腔病学》汇总题库集.docx
-
《建筑施工组织与管理》教案教学内容.docx
-
《班委选举细则》.docx
-
《光伏组件监造技术标准》.docx
-
《年终表彰大会讲话稿 表彰大会致辞稿》.docx
-
《听颖师弹琴》《李凭箜篌引》分别鉴赏及对比鉴赏加练习人教版高一选修.docx
-
《鹬》分镜头脚本.docx
-
5套打包宜昌市小学四年级语文上期中考试单元测试题及答案.docx
-
16开纸田字格word字帖模板.docx
-
315食品安全活动策划书.docx
-
CFG桩基础施工方案详解.docx
-
08人机工程学中英文资料外文翻译文献.docx
-
《读古典名著口百味人生》获奖精品省优获奖教案 部编版语文精品.docx
-
《功课很重要》教案1学习资料.docx
-
《冷拼工艺》教案.docx
-
《唐人街探案3》电影观后感《唐人街探案3》心得作文5篇.docx
-
《C语言程序设计》习题.docx
-
《幼儿园课程游戏化的实践研究》.docx
-
4现场管理档案.docx
-
13级西医专业基础综合测评答.docx
-
100部校园电影全.docx
-
CAD制图标准.docx
-
《分数除法一.docx
-
edb72192ac02de80d4d8d15abe23482fb5da0291.docx
-
H236车联网资料路尚行业版OMP操作手册服务商0618.docx
-
jarlasscon门机.docx
-
《百分百责任学习心得》.docx
-
《管理学基础》习题18章单凤儒.docx
-
《旅游专业日语》课程实施方案.docx
-
《铁路旅客运输服务》学习指导书.docx
-
《预算会计》课程标准.docx
-
董卿《朗读者》经典开场白精华集锦.docx
-
钢筋混凝土计算实例.docx
-
儿科常见疾病中西医诊疗规范修改.docx
-
高中统编版历史新教材《文化交流与传播》第6课《 古代人类的迁徙和区域文化的形成》教案.docx
-
二手房销售带看过程话术.docx
-
超星尔雅中国古建筑欣赏与设计课后作业.docx
-
房地产经纪人考试业务操作考试试题及答案供参考.docx
-
钢结构施工方案.docx
-
完整版博士研究生入学考试真题英语.docx
-
高新技术企业认定管理工作网用户使用手册1.docx
-
张拉压浆安全专项施工方案.docx
-
最新冀教版六年级语文下册短文阅读完整版.docx
-
物业温馨提示例范本.docx
-
《全国导游基础知识》第四章知识归纳导游资格考试.docx
-
项目融资商业实施计划书范文.docx
-
房地产行业开发资金来源行业集中度及投资情况分析.docx
-
javaee考试.docx
-
校学生会体育部个人期末工作总结doc.docx
-
四年级科学下册第二单元新的生命教材分析.docx
