 伺服驱动器参数设置步骤.docx
伺服驱动器参数设置步骤.docx
- 文档编号:23449981
- 上传时间:2023-05-17
- 格式:DOCX
- 页数:23
- 大小:766.83KB
伺服驱动器参数设置步骤.docx
《伺服驱动器参数设置步骤.docx》由会员分享,可在线阅读,更多相关《伺服驱动器参数设置步骤.docx(23页珍藏版)》请在冰豆网上搜索。
伺服驱动器参数设置步骤
伺服驱动器参数
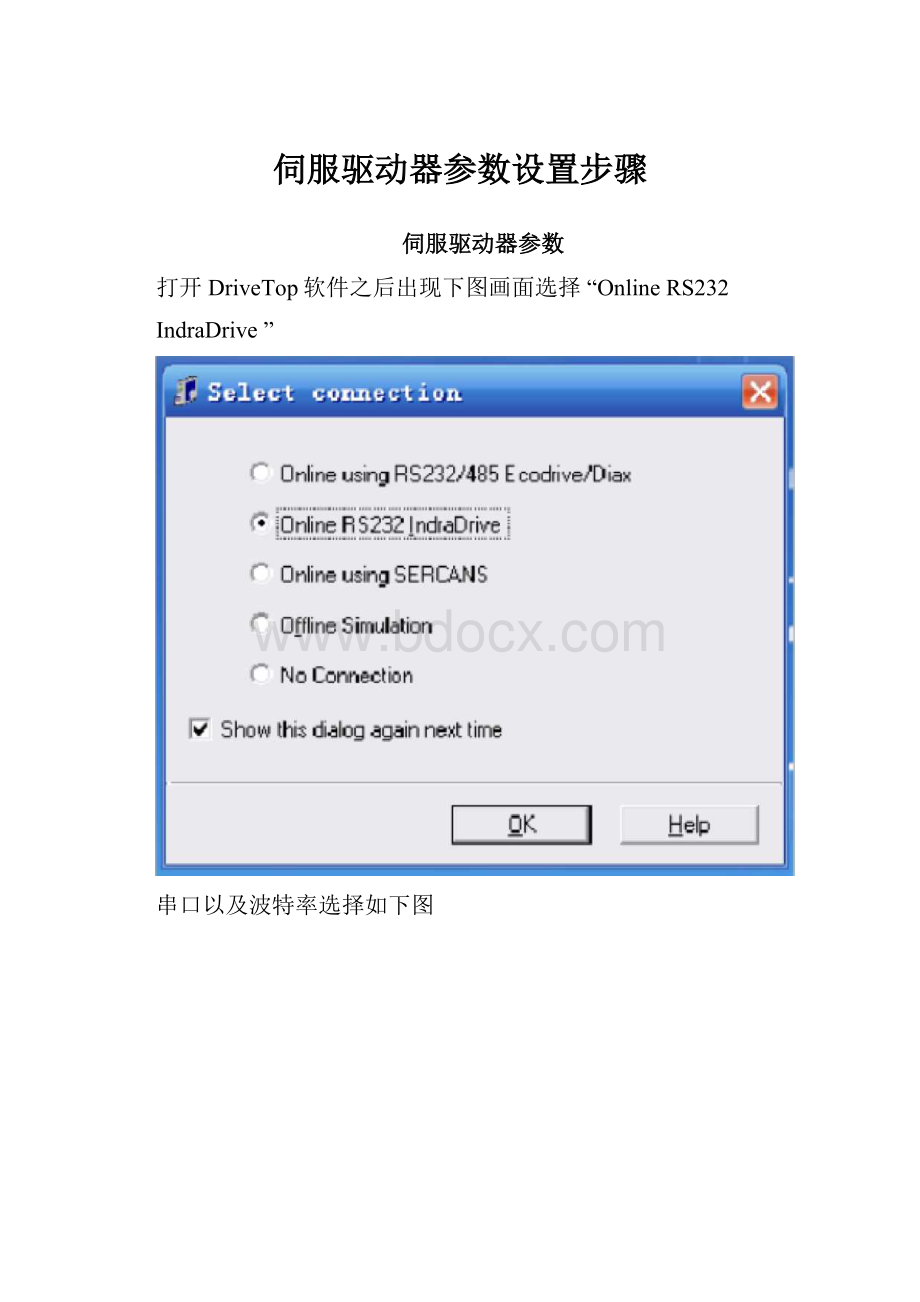
打开DriveTop软件之后出现下图画面选择“OnlineRS232
IndraDrive”
串口以及波特率选择如下图
参数设定首先进入“Operatingmodeselecting”菜单“Primary
operationmode”一栏选择“velocitycontrol”最后点击Next就可以进入以下参数设置画面
畀Signalstatusvprd-Drive5,Anvendungsart
Stalejigrul^atus^oid
Souicepaianeta
眺比.
Hit
Ex
>
■g
Ne一
--
MAD160-C-0150-SA-S2-K-G-0-35-N1发动机型号
Temperaturesensor:
KTY84
畀Sealing/units-Drive5,Anvendungsart
lypectjcalirg
广linear(tranjlator^j'
f*rOta'y
厂nonunifern
Hooolubon
Ntgalimofptiition,veloci^andtorqueifacedata
Cyes
no
「nonuniforn
2500Rpm需要设置
Ramp2pitch:
150rad/s与Decelerationramp2:
150rad/s
需要设置
畀SepondaryaperatipnBode1-Dpi^e5,Ans3rt
DrivecontroledpOsiticning/tfelativednvetanlr.nterpdatiort.eftc.1.lagless
Fosituringvabcily
Posit»ringacceleraton
Positioiingdecelefaton
f?
Drivecontrol-Drive5.,AurexidmiEsaxt
Modedmotorcontrcl
柠Field-onarttedclosed-leapcontrol
「U/fopenlooponttol厂FielAfie^edepfirHxpcxir^al
Torque4orce/curientlimrts
Leaddefaultcontrolerpar^m?
tai:
Pautornat匚loadrigcfdefaultcortrtjlerparameterswhenclearingenuinca;emotor隔$peplaced
'Rack|理mut、|Exil|H.elp
ControlloapjCentralloopmcnitnring
Veloci^conticlhopnronilorhg
存active
Cnotactive
Pusiiuriloopmcnituiirij
CloseIHelpI
EcivpHaltations;torque/forcesndcurrent1iwit?
EfActive-orque/force:
orirnaridv^luerorqMe-generatinscurrent,commandvalue
Velocity
looc
0.0究01Z2盘胡
Actvalueborquefanilpot.(stale)
Act.valuetorqueknitneq.(stalic]
Actualvaliepwktorquelimit
111C%
Activepe^kcifiantU3.933Aett
MaocimiLinipassivecontinuoLiscurrent94999Aeff
£3Tprque/fflrces
Acc&lffatbnfeedfouward
u
Actvalu»kwquBimitjas.stctid
Aclvalufttorqueimilneg.staticI
Acbalvoluepeaktoiquslimit
'Cbse''Ihelp
Torque/forcelimitvaluepositive:
400%
Torque/forcelimitvaluenegative:
-400%
Torque/forcepeaklimit:
400%
Bipolartorque/forcelimitvalue:
400%
需设置
Ciirreit+]~i~t
Tempeiaomodelamplilier
Amplifierpeakcument
Amplifiernominalcurren*
AmpliFierienripeiiatLir&
ThernnaldriveIBad
□vorluadwoniiiy
Torque4cr«
I咼
>Min-*■
Minr
IdCommand
Stallcurienllimit
u
Iq-Ccmmand
FIumloop
Activepeakcurrerit"I曲9.的9Aeff
Maximumposstlecontriuouscurerit34.339Aeff
jrlotnrcontrol
lx
IdertNonamevalue
S-0-010GCunentloopciroportionalaain12BQ
A
S-0-0107Cuirentloopintegralactiontime1
S-0^0380DCbusvoltagt
P-0-0001SwitchingfrequencyofthepoweioutputsldgeP-0-0043Toique-genefatingcurrent,,^clualvalu&
P-0-0044Flin-ganaralrycurrentactualvalue
P00045Controlwordofcurrentconkolter
F'00046St^uswordofcurrentcontrollef
P-D^528FluxcontrolloopproportKinalgain
P-0^0529Scalingofstallcurrentlimit
15
561.S
^000
0.207
•j吕&胡
oooo.oooo.oooo<..oooo.oooo.oooo.a..
&31
100
1m
IsKI:
:
mVHAA
Sorting
_ieaich_|
aidenlnumbefs
广name$
Change
Close|del?
|
$7drivehal±-DriveAnvendimf:
sart
Lookindialog1'Staur$messigns''
hCKt> WJ Help r^'Wt DriveHaltaccelerationbipolar: 800rad/s Standstillwindow: 5Rpm 畀Errorreacti(rn.jsupplynodule-Drive5,AiweTidiLngsart ModulBqroup Ccniiclvjo-dDCbusvoltageOK SlalutwoxlDCbkt? volt^fleOK F^ickar^rftflc'icn PRMcbontoerrjrirtmiddle^roup PI'^gerirgotpackagereactionon&rrar OCbusiindervoltage I<•UrKjeivgfcajeasrton-fataleror 厂Undm卅出日ge渺ncn-fatalearning 厂Drivsclearsernr-dacno^is.feriaUasignaliscancelled Eignalirgfataldriveerrors(F&.]忙thepowersupplymodule f*Nosignaling 广R»vef$¥曲modulesvAchegpoweroffandactivatestheDCbusshortcicuitifrealizedonhardwareside 亡M.E毬Z]Nert>IExitIHelp 亡M.E毬Z]Nert>IExitIHelp 畀Encoderevulat±on-Drive5.Anrexidiuifsart EncodetemiiaticNn 介Emulationofihcre-mentalercoder 广Emulatbriofcbsolutt? ericodei 「Moeinuhtion □utpul: ofsignal SigndJtdsctien Resolutionofencoderemulat: 2048Counts/Rev Makerpulseoffset: 0CountsMakerpulsedistance: 2048 Counts Tusi-tipTi? vitchpoint1-Drive5,tnvendung3art Signal 'RackI理mut、IExil|H.elp CA.J>kirK4L 注: 此软件为翻页就会保存修改数据,未提到的参数为默认制值


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 伺服 驱动器 参数设置 步骤
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《地质测量图绘制细则》.docx
《地质测量图绘制细则》.docx
-
《大学生健康教育教程》考试题库500题DR含答案.docx
-
《黄鹤楼送孟浩然之广陵》字词注释.docx
-
《葱爆羊肉》概要.docx
-
《面向对象程序设计》C++综合练习学生版.docx
-
《化学反应工程》课程综合复习资料.docx
-
《社会心理》网上形考参考答案.docx
-
《轮扣式支架》模板施工方案.docx
-
《团委新成员大会主持稿1》.docx
-
《三峡学典》思品七上.docx
-
《有效备课上课听课评课》读书笔记.docx
-
《土地的誓言》导学案.docx
-
1汽车维修专业人才需求调研报告.docx
-
《应用文写作》教学设计.docx
-
1级三相费控智能电能表技术规范.docx
-
17#楼机房层模板施工方案.docx
-
《稻草人》精彩读书笔记精选多篇doc.docx
-
《机械制造工艺与装备》复习资料.docx
-
《木兰从军》教案.docx
-
《神奇的毛细现象》.docx
-
《围城》读书心得精选范文1000字5篇.docx
-
《幼儿园是我家》大班教案.docx
-
1资产负债表变动情况的分析评价.docx
-
5s活动总结报告5s总结报告2篇.docx
-
《当代学生》初中文言文阅读训练篇.docx
-
《机械制造工艺学》电子教案.docx
-
《民事案件案由规定》物权纠纷案由的理解与适用.docx
-
《社会学研究方法学习心得5篇范文》.docx
-
《外商投资企业联合年检报告书》填写要求和指标说明.docx
-
《幼儿园课程论》形成性考核册答案27497.docx
-
1在直接影响物价水平的诸多因素当中.docx
-
10套普通话练习材料.docx
-
路灯招标文件范本.docx
-
论我国保险法中的自杀条款.docx
-
旅游英语口语大全.docx
-
马克思学习方法.docx
-
煤矿安全监督检查制度范文.docx
-
美国食品安全监管体系的特点.docx
-
门卫室土建施工方案.docx
-
面对挫折作文800字小标题.docx
-
灭菌器验证方案.docx
-
名人智慧故事.docx
-
磨床基础知识.docx
-
某某地投资估算分析报告经典版.docx
-
高中信息技术会考试题必修部分.docx
-
最高额抵押担保下即使具体融资合同中缺少抵押担保的约定担保人的责任也不能免除.docx
-
最新农林专业知识.docx
-
高中政治 国家与国际组织常识复习试题 新人教版选修3.docx
-
1消防连廊施工方案.docx
-
10KV变压器保护整定方案.docx
-
个人求职简历最全模板WORD版可编辑.docx
