 计算机控制技术实验指导书1.docx
计算机控制技术实验指导书1.docx
- 文档编号:23282341
- 上传时间:2023-05-15
- 格式:DOCX
- 页数:22
- 大小:393.86KB
计算机控制技术实验指导书1.docx
《计算机控制技术实验指导书1.docx》由会员分享,可在线阅读,更多相关《计算机控制技术实验指导书1.docx(22页珍藏版)》请在冰豆网上搜索。
计算机控制技术实验指导书1
计算机控制技术
实验指导书
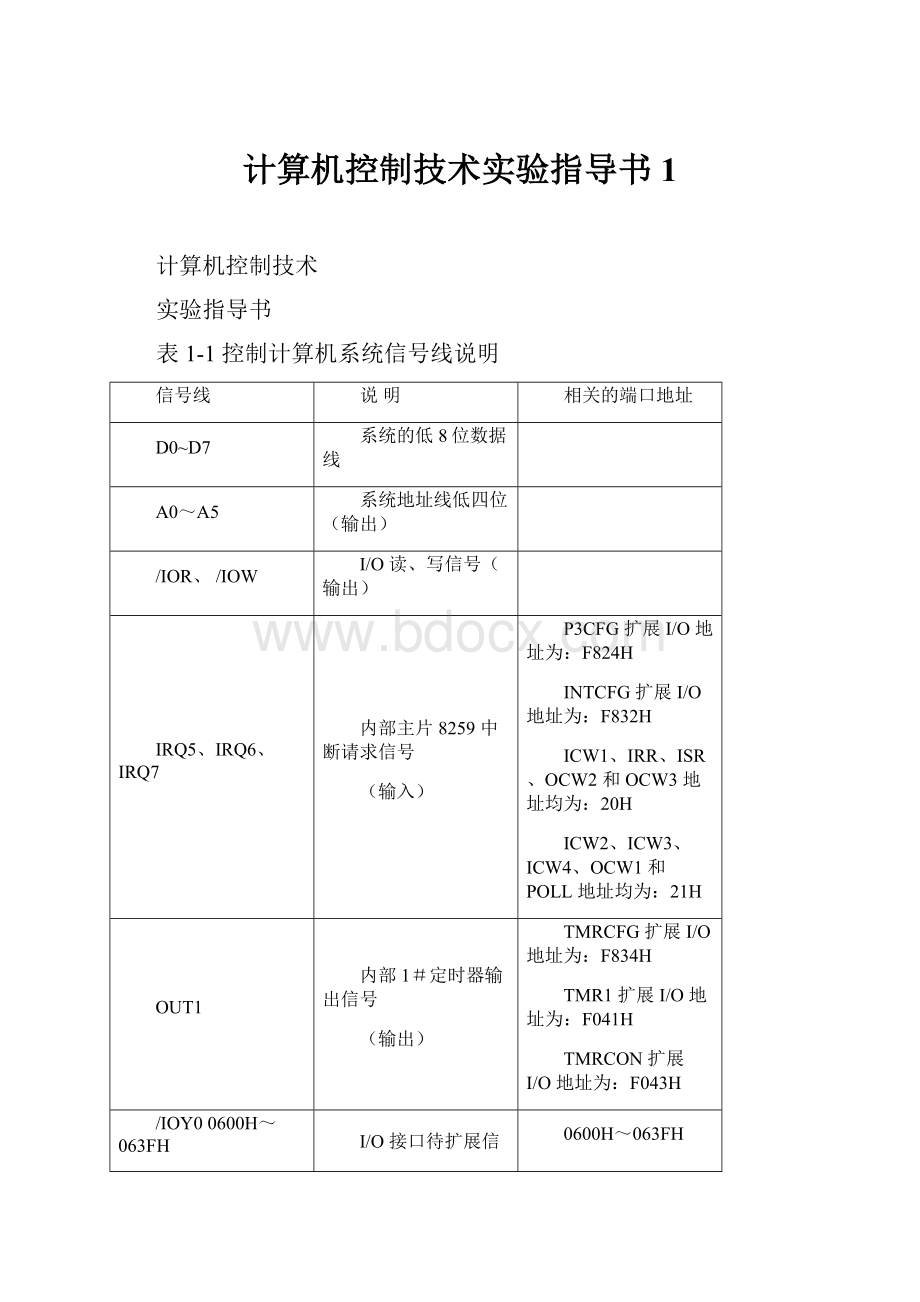
表1-1控制计算机系统信号线说明
信号线
说明
相关的端口地址
D0~D7
系统的低8位数据线
A0~A5
系统地址线低四位(输出)
/IOR、/IOW
I/O读、写信号(输出)
IRQ5、IRQ6、IRQ7
内部主片8259中断请求信号
(输入)
P3CFG扩展I/O地址为:
F824H
INTCFG扩展I/O地址为:
F832H
ICW1、IRR、ISR、OCW2和OCW3地址均为:
20H
ICW2、ICW3、ICW4、OCW1和POLL地址均为:
21H
OUT1
内部1#定时器输出信号
(输出)
TMRCFG扩展I/O地址为:
F834H
TMR1扩展I/O地址为:
F041H
TMRCON扩展I/O地址为:
F043H
/IOY00600H~063FH
I/O接口待扩展信号(输出)
0600H~063FH
/IOY10640H~067FH
0640H~067FH
/IOY2
0680H~06BFH
DIN0~DIN3
4位数字量输入信号(输入)
P1口的低四位对应P1.0~P1.3
P1CFG扩展I/O地址为:
F820H
P1DIR扩展I/O地址为:
F864H
P1PIN扩展I/O地址为:
F860H
DOUT0~
DOUT3
4位数字量输出信号(输出)
P2口的低四位对应P2.0~P2.3
P2CFG扩展I/O地址为:
F822H
P2DIR扩展I/O地址为:
F86CH
P2LTC扩展I/O地址为:
F86AH
注:
1.“/”号表示该信号低电平有效
2.扩展I/O地址使能操作:
MOVAX,8000H
OUT23H,AL
XCHGAL,AH
OUT22H,AL
OUT22H,AX
扩展I/O地址无效操作:
MOVAL,00H
OUT23H,AL
1.信号源发生单元电路
1)典型信号发生单元,其原理图见图1—3
图1.3
此单元可产生重复的阶跃,斜坡,抛物线三种典型信号,且信号的幅值,频率通过电位器W11,W12可以调节。
为了使运放为零初始状态并且积分漂移不致累加增多,设置了锁零电路,其原理是各运放所接的反馈阻抗短路,此时3DJ6的D,S端导通。
U1SG单元的S端为M1455输出端,S与ST短接时有锁零操作(S端非零时不锁,为零时锁),此时,U1SG单元的OUT端可产生三种信号;当ST端与S端断开,而和+5伏短接时,无锁零操作,OUT端无信号,S端只产生方波。
2.运算模拟单元电路:
该单元把实验所需的电阻,电容一端接在运放的输入端,用短路块可以灵活方便把所需的元件接入运放单元中,具有极高的实验接线效率和实验成功率,实验者可以自己扩展实验。
3.模数转换单元电路:
模数转换单元采用ADC0809芯片,分辨率为八位二进制码。
模拟输入通道8路(IN0~IN7),通过三端地址码A,B,C多路开关可选通8路模拟输入的任何一路进行A/D转换。
其中IN1~IN5的模拟量输入允许范围0V~4.96V,对应数字量00H~FFH,2.5V对应80H。
IN6和IN7两路由于接上了上拉电阻,所以模拟量输入允许范围:
—5V~+4.96V,对应数字量00H~FFH。
0V对应80H。
其他控制线根据实验要求另外接线(A,B,C,start,EOC,IN0~IN7)。
图1.4
第3章80X86计算机控制技术实验
实验一D/A转换实验
一、实验目的
学习D/A转换器原理及接口方法,并掌握TLC7528芯片的使用。
二、实验设备
PC机一台,TD-ACS实验系统一套或“TD-ACC+实验系统一套+i386EX系统板一块”。
三、实验内容
编写实验程序,实现D/A转换产生周期性波形,并用示波器观察。
四、实验原理
本实验采用TLC7528芯片,它是8位、并行、两路、电压型输出数模转换器。
其主要参数如下:
转换时间100ns,满量程误差1/2LSB,参考电压-10V~+10V,供电电压+5V~+15V,输入逻辑电平与TTL兼容。
实验平台中的TLC7528的八位数据线、写线和通道选择控制线已接至控制计算机的总线上。
片选线预留出待连接到相应的I/O片选上,具体如图3-1。
图3-1
以上电路是TLC7528双极性输出电路,输出范围-5V~+5V。
“W101”和“W102”分别为A路和B路的调零电位器,实验前先调零,往TLC7528的A口和B口中送入数字量80H,分别调节“W101”和“W102”电位器,用万用表分别测“OUT1”和“OUT2”的输出电压,应在0mV左右。
五、实验步骤与结果:
1、调零程序:
DA1_ADDREQU0640H
DA2_ADDREQU0641H
STACK1SEGMENTSTACK
DW256DUP(?
)
STACK1ENDS
CODESEGMENT
ASSUMECS:
CODE
START:
CALLSYSINIT;调用系统初始化子程序
AA:
MOVAL,80H
movdx,0640h
OUTdx,AL
JMPAA
SYSINIT:
MOVAX,8000H;系统初始化子程序
OUT23H,AL;扩展IO使能
XCHGAL,AH
OUT22H,AL
OUT22H,AX
MOVDX,0F822H;初始化管脚配置P2CFG,配置CS0#
MOVAL,70H
OUTDX,AL
MOVDX,0F824H;初始化管脚配置P3CFG,配置主片IRQ7
MOVAL,0B2H
OUTDX,AL
MOVDX,0F832H;初始化管脚配置INTCFG
MOVAL,0AH
OUTDX,AL
MOVDX,0F834H;初
MOVAL,15H;将GATE1接VCC
OUTDX,AL
RET
CODEENDS
ENDSTART
用万用表测量TLC7528的输出电压(“OUT1”),调节电位器使其为0V。
2、锯齿波:
DA1_ADDREQU0640H
DA2_ADDREQU0641H
STACK1SEGMENTSTACK
DW256DUP(?
)
STACK1ENDS
CODESEGMENT
ASSUMECS:
CODE
START:
CALLSYSINIT;调用系统初始化子程序
MOVAL,00H
AGAIN:
MOVDX,DA1_ADDR
OUTDX,AL
INCAL
JMPAGAIN
SYSINIT:
…;系统初始化子程序,同上
RET
CODEENDS
ENDSTART
3、三角波
DA1_ADDREQU0640H
DA2_ADDREQU0641H
STACK1SEGMENTSTACK
DW256DUP(?
)
STACK1ENDS
CODESEGMENT
ASSUMECS:
CODE
START:
CALLSYSINIT;调用系统初始化子程序
CC:
MOVAL,00H
AA:
movdx,0640h
OUTdx,AL
CMPAL,0FF
INCAL
JNZAA
BB:
DECAL
OUTdx,AL
CMPAL,00H
JNZBB
JMPCC
SYSINIT:
…;系统初始化子程序,同上
RET
CODEENDS
ENDSTART
4、方波:
DA1_ADDREQU0640H
DA2_ADDREQU0641H
STACK1SEGMENTSTACK
DW256DUP(?
)
STACK1ENDS
CODESEGMENT
ASSUMECS:
CODE
START:
CALLSYSINIT;调用系统初始化子程序
AA:
MOVAL,00H
movdx,0640h
OUTdx,AL
CALLDELAY1
MOVAL,0FFH
OUTdx,AL
CALLDELAY2
JMPAA
DELAY1:
MOVCX,00FFH
BB:
MOVAX,000FH
CC:
DECAX
JNZCC
LOOPBB
RET
DELAY2:
MOVCX,01FFH
FF:
MOVAX,000FH
EE:
DECAX
JNZEE
LOOPFF
RET
SYSINIT:
…;系统初始化子程序,同上
RET
CODEENDS
ENDSTART
5、正弦波:
DA1_ADDREQU0640H
DA2_ADDREQU0641H
STACK1SEGMENTSTACK
DW256DUP(?
)
STACK1ENDS
datasegment
org500h
db080h,096h,0abh,0c0h,0d2h,0e2h,0eeh,0f8h,0feh,0ffh
db0feh,0f8h,0eeh,0e2h,0d2h,0d2h,0c0h,0abh,096h,080h
db069h,054h,03fh,02dh,01dh,011h,007h,001h,0h
db01h,07h,011h,1dh,2dh,3fh,54h,69h
dataends
CODESEGMENT
ASSUMECS:
CODE
START:
movax,data
movds,ax
CALLSYSINIT
aa:
movdi,0500h
movcx,024h
bb:
moval,[di]
MOVDX,DA1_ADDR
OUTDX,AL
incdi
loopbb
JMPaa
SYSINIT:
…;系统初始化子程序,同上
RET
CODEENDS
ENDSTART
实验二A/D转换实验
一、实验目的
学习A/D转换器原理及接口方法,并掌握ADC0809芯片的使用
二、实验设备
PC机一台,TD-ACS实验系统一套或“TD-ACC+实验系统一套+i386EX系统板一块”。
三、实验内容
编写实验程序,将信号源产生的方波作为ADC0809的模拟量输入,并将转换所得的8位数字量送TLC7528进行DA转换输出。
四、实验原理
ADC0809芯片主要包括多路模拟开关和A/D转换器两部分,其主要特点为:
单电源供电、工作时钟CLOCK最高可达到1200KHz、8位分辨率,8个单端模拟输入端,TTL电平兼容等,可以很方便地和微处理器接口。
TD-ACC+(或TD-ACS)教学系统中的ADC0809芯片,其输出八位数据线以及CLOCK线已连到控制计算机的数据线及系统应用时钟1MCLK(1MHz)上。
其它控制线根据实验要求可另外连接(A、B、C、STR、/OE、EOC、IN0~IN7)。
根据实验内容要求,可以设计出如图3-2所示的实验线路图。
图3-2
上图中,AD0809的启动信号“STR”是由控制计算机定时输出方波来实现的。
“OUT1”表示386EX内部1#定时器的输出端,定时器输出的方波周期=定时器时常,系统定时器定时10ms输出方波信号启动A/D转换器。
图中ADC0809芯片输入选通地址码A、B、C为“1”状态,选通输入通道IN7。
“IRQ7”表示386EX内部主片8259的7号中断,用作采样中断。
参考流程如图3-3所示:
图3-3
系统初始化子程序:
SYSINIT:
MOVAX,8000H
OUT23h,AL;扩展IO使能
XCHGAL,AH
OUT22H,AL
OUT22H,AX
MOVDX,0F822H;初始化管脚配置P2CFG,配置CS0#
MOVAL,70H
OUTDX,AL
MOVDX,0F824H;初始化管脚配置P3CFG,配置主片IRQ7
MOVAL,0B2H
OUTDX,AL
MOVDX,0F832H;初始化管脚配置INTCFG
MOVAL,0AH
OUTDX,AL
MOVDX,0F834H;初始化管脚配置TMRCFG
MOVAL,15H;将GATE1接VCC
OUTDX,AL
MOVAL,11H;初始化主片8259
OUT20H,AL
MOVAL,08H
OUT21H,AL
MOVAL,04H
OUT21H,AL
MOVAL,01H
OUT21H,AL
MOVAL,6FH;写主片8259的中断屏蔽字,允许主片的IRQ7(用户程序使用)和IRQ4(系统通讯用)
OUT21H,AL
MOVAL,11H;初始化从片8259
OUT0A0H,AL
MOVAL,30H
OUT0A1H,AL
MOVAL,02H
OUT0A1H,AL
MOVAL,01H
OUT0A1H,AL
MOVAL,0FFH
OUT0A1H,AL
RET
五、实验步骤与结果:
(1)按图3-2接线(注意:
图中画“o”的线需自行连接),连接好后,请仔细检查,无错误后方可开启设备电源。
(2)打开联机操作软件,参照流程图3-3,在编辑区编写实验程序。
检查无误后编译、链接、装载程序。
(3)运行程序。
通过示波器观察输入和输出波形。
实验三纯比例调节器实验
一、实验目的
熟悉纯比例调节器工作原理,学习纯比例调节器参数整定方法。
二、实验设备
PC机一台,TD-ACS实验系统一套或“TD-ACC+实验系统一套+i386EX系统板一块”。
三、实验原理和内容
图3-4
图3-4是一个比例闭环控制系统框图,其硬件电路原理及接线图可设计如下,图中画“○”的线需在实验中自行接好,对象需在运放单元搭接。
图3-5
上图中,控制计算机的“OUT1”表示386EX内部1#定时器的输出端,定时器输出的方波周期=定时器时常,“IRQ7”表示386EX内部主片8259的7号中断,用作采样中断。
这里,系统误差信号E通过模数转换单元“IN7”端输入,控制计算机的定时器作为基准时钟(初始化为10ms),定时采集“IN7”端的信号,并通过采样中断读入信号E的数字量,并进行比例计算,得到相应的控制量,再把控制量送到数模转换单元,由“OUT1”端输出相应的模拟信号,来控制对象系统。
控制实验的参考程序流程图如图3-6所示。
图3-6
五、实验步骤与结果:
记录各种情况下性能指标最好的系统输出波形,以及稳态误差、调整时间,超调量等系统指标数据,并对数据进行分析。
实验四PID控制器实验
一、实验目的
熟悉数字PID工作原理,学习PID调节器参数整定方法。
二、实验设备
PC机一台,TD-ACS实验系统一套或“TD-ACC+实验系统一套+i386EX系统板一块”。
三、实验原理和内容
在模拟调节系统中,PID算法表达式为:
其中:
kp为比例系数,TI是积分时间常数,TD是微分时间常数。
在计算机系统中,离散的数字PID算法可以表示为位置式PID控制算式,或增量式PID控制算式。
增量式PID控制算式为:
其中:
=KP+KI+KD
=KP+2KD
=KD
T:
采样周期,
k:
采样序号,
u(k):
第k次采样调节器输出,
e(k):
第k次采样误差值。
图3-7是一个闭环控制系统方框图,其硬件电路原理及接线图可设计如下,图中画“○”的线需在实验中自行接好,对象需在运放单元搭接。
图3-7
图3-8(同图3-5)
图3-8中,控制计算机的“OUT1”表示386EX内部1#定时器的输出端,定时器输出的方波周期=定时器时常,“IRQ7”表示386EX内部主片8259的7号中断,用作采样中断。
这里,系统误差信号E通过模数转换单元“IN7”端输入,控制机的定时器作为基准时钟(初始化为10ms),定时采集“IN7”端的信号,并通过采样中断读入信号E的数字量,并进行PID计算,得到相应的控制量,再把控制量送到数模转换单元,由“OUT1”端输出相应的模拟信号,来控制对象系统。
参考程序流程图如图3-9所示。
图3-9
为了便于实验参数的调整,下面讨论PID参数对系统性能的影响:
(1)增大比例系数KP一般将加快系统的响应,在有静差的情况下有利于减小静差。
但过大的比例系数会使系统有较大的超调,并产生振荡,使系统稳定性变坏。
(2)增大积分时间参数TI有利于消除静差、减小超调、减小振荡,使系统更加稳定,但系统静差的消除将随之减慢。
(3)增大微分时间参数TD有利于加快系统响应,使超调量减小,系统稳定性增加,但系统对扰动的抑制能力减弱,对扰动有较敏感的响应。
参数调整:
A、归一化参数调整法
为了减少在线调整整定参数的数目,常常人为假定约束的条件,以减少独立变量的个数,例如取:
T≈0.1TS
T1≈0.5TS
T2≈0.125TS(4-2)
式中:
TS是纯比例控制时的临界振荡周期
将式4-2代入式4-1。
可得:
(4-3)
由上式可看出,对4个参数的整定简化成了对一个参数KP的整定,使问题明显简单化了。
B、试凑法
1)调节时首先按纯比例调节器的调节方法调节,此时令KI=KD=0,KP=KP1。
直到得到满意的过渡过程为止。
2)减小KP的值,令KP=0.8KP1,加入KI,直到出现满意的过程。
3)见效KP的值,令KP=0.6KP1,加入KD,同时调整KI和KD,直到出现满意的过度过程。
4)如动态过程仍不理想,则可重复上面2),3)的调节,同时改变KP的比例。
直到出现满意的动态过程。
由于PID三个参数有互补作用,减小一个往往可由几个增大来补偿,因此参数的整定值不唯一,不同的参数组合完全有可能得到同样的效果。
五、实验步骤与结果:
记录各种情况下性能指标最好的系统输出波形,以及稳态误差、调整时间,超调量等系统指标数据,并对数据进行分析。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 计算机控制 技术 实验 指导书
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #全自动电容电感测试仪.docx
#全自动电容电感测试仪.docx
-
《 运筹学 》课程教学大纲共12页.docx
-
《边城》论文.docx
-
《光曲》时教学设计.docx
-
《环境生物学孔繁翔》课后习题答案.docx
-
《建筑施工技术》复习题集与答案知识分享.docx
-
《理论力学B》课程教学大纲.docx
-
《农村社会基层治理危机的预防与对策基于广西的实证分析》申报书第十二届挑战杯.docx
-
《信息诚信校园》.docx
-
《中小学教室照明设计规范》之欧阳数创编.docx
-
《从愚昧到科学科学技术简史》.docx
-
1监理基本工作.docx
-
03岁早教亲子活动.docx
-
05秋第三次作业第678章.docx
-
《安全生产培训管理办法》国家安监总局令第44号施行.docx
-
《护理学基础》复习题.docx
-
《煤矿安全规程》安全考试复习题.docx
-
《嵌入式操作系统》实验报告.docx
-
《生产过程危险和有害》 T.docx
-
《危机传播管理》完整笔记胡百精.docx
-
《24噪音管理控制程序》.docx
-
《不倒翁》教案最新.docx
-
《大学生恋爱与性健康》期末考试满分.docx
-
《轨道工程》课程设计任务书.docx
-
《小学数学探究性学习的研究》数学课题申报表.docx
-
《会计电算化》培训班讲义第三节.docx
-
1 实习基本情况概述.docx
-
《亮剑》观后感15篇.docx
-
《保险学概论》网考题库判断题.docx
-
《叛逆不是孩子的错》读后感心得体会.docx
-
《枫树上的喜鹊》优秀教案13.docx
-
《管理信息系统》模拟试题及练习题含答案.docx
-
Android深入四大组件三Service的绑定过程.docx
-
现代企业员工职业化训练解决方案35页.docx
-
小学教师国画培训心得5篇.docx
-
普通话练习.docx
-
上海市虹口区届高三二模语文试题及答案.docx
-
新进分包商队伍考察表之欧阳体创编.docx
-
薪酬管理知识梳理刘昕+人大第四版.docx
-
销售个人职业规划范文.docx
-
植树节活动方案合集5篇最新.docx
-
最新译林版小学英语四年级上册教案 全册.docx
-
汽车维修工国家职业资格四级理论精选试题.docx
-
名师整理最新人教版英语冲刺中考《短文填空》专题提升训练含答案.docx
-
早期中英条约翻译问题.docx
-
人教版高中生物必修一基础知识检测卷.docx
-
知识竞赛抢答器控制程序设计.docx
-
中考物理试题专题练习功与机械能答案版.docx
-
民族理论与民族政策课程自测题.docx
-
人口信息化管理系统操作手册.docx
-
浙大普通生物学复习要点.docx
