 16农大自动控制原理在线作业3.docx
16农大自动控制原理在线作业3.docx
- 文档编号:23235116
- 上传时间:2023-05-15
- 格式:DOCX
- 页数:12
- 大小:44.45KB
16农大自动控制原理在线作业3.docx
《16农大自动控制原理在线作业3.docx》由会员分享,可在线阅读,更多相关《16农大自动控制原理在线作业3.docx(12页珍藏版)》请在冰豆网上搜索。
16农大自动控制原理在线作业3
一、单选题
1.
(5分)
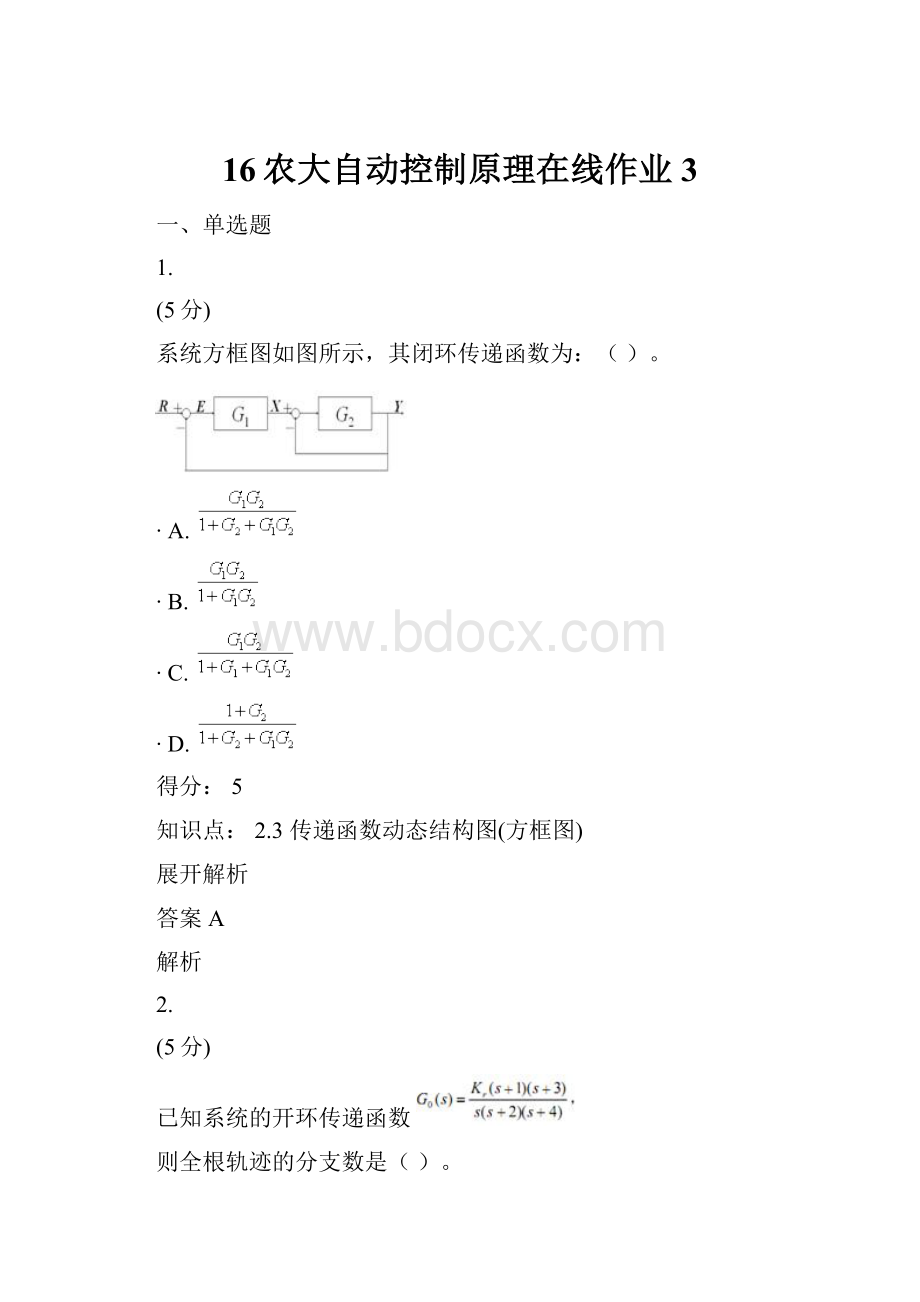
系统方框图如图所示,其闭环传递函数为:
()。
∙A.
∙B.
∙C.
∙D.
得分:
5
知识点:
2.3传递函数动态结构图(方框图)
展开解析
答案A
解析
2.
(5分)
已知系统的开环传递函数
则全根轨迹的分支数是()。
∙A.4
∙B.3
∙C.2
∙D.1
得分:
5
知识点:
4.2根轨迹的绘制规则
展开解析
答案B
解析
3.
(5分)
某系统闭环传递函数为:
,单位阶跃响应近似为()。
∙A.
∙B.
∙C.
∙D.
得分:
5
知识点:
3.4高阶系统的动态响应
展开解析
答案A
解析
4.
(5分)
根轨迹法是利用()在s平面上的分布通过图解的方法求取()的位置。
∙A.开环零、极点;闭环零点
∙B.闭环零、极点;开环零点
∙C.开环零、极点;闭环极点
∙D.闭环零、极点;开环极点
得分:
5
知识点:
4.1根轨迹概念
展开解析
答案C
解析
5.
(5分)
图示曲线是开环传递函数为()的系统的根轨迹。
∙A.
∙B.
∙C.
∙D.
得分:
5
知识点:
4.2根轨迹的绘制规则
展开解析
答案A
解析
6.
(5分)
利用近似折线法绘制二次振荡环节的Bode图时在()情况下可以不进行误差修正。
∙A.0<ξ1
∙B.ξ>0.8
∙C.0.4<ξ<0.8
∙D.ξ>1
得分:
5
知识点:
5.3频率特性G(jω)的对数坐标图(Bode图)
展开解析
答案C
解析
7.
(5分)
下列各个量中,反映系统快速性的量是()。
∙A.超调量
∙B.谐振频率
∙C. 稳态误差
∙D.调整时间
得分:
5
知识点:
5.5频率特性与系统性能的关系
展开解析
答案D
解析
8.
(5分)
控制系统的输入输出描述利用的数学模型是()。
∙A.传递函数
∙B.高阶微分方程
∙C.高阶多项式方程
∙D.一阶微分方程
得分:
5
知识点:
2.1控制系统的微分方程
展开解析
答案A
解析
9.
(5分)
Bode图与Nyquist图的对应关系为()。
∙A.Nyquist图上的单位园对应Bode图上的1dB线
∙B.Nyquist图上的单位园对应Bode图上的-180°线
∙C.Nyquist图上的负实轴对应Bode图上的-180°线
∙D.Nyquist图上的负实轴对应Bode图上的1dB线
得分:
5
知识点:
5.4利用频率特性分析系统的稳定性
展开解析
答案C
解析
10.
(5分)
高阶系统时域单位阶跃响应是由稳态响应和()组合而成。
∙A.一阶模态、二阶模态
∙B.衰减响应
∙C.极点模态、零点模态
∙D.不衰减响应
得分:
5
知识点:
3.4高阶系统的动态响应
展开解析
答案A
解析
11.
(5分)
下列说法正确的是()。
∙A.对数频率特性的正频与负频部分关于ω轴对称
∙B.逆因子的对数频率特性关于实轴对称
∙C.频率特性极坐标图的正频与负频部分关于实轴对称
得分:
5
知识点:
5.2频率特性G(jω)的极坐标图(Nyuist图)
展开解析
答案C
解析
12.
(5分)
已知系统劳斯表如图,则系统在右半s平面的特征根数为()。
∙A.2个
∙B.4个
∙C.1个
∙D.3个
得分:
5
知识点:
3.5稳定性及代数判据
展开解析
答案C
解析
13.
(5分)
在下列说法中正确的是()。
I根轨迹的点必定满足幅值条件
II根轨迹的点不一定满足幅值条件
III根轨迹的点必定满足相角条件
IV根轨迹的点不一定满足相角条件
∙A.只有I和III正确
∙B.只有II和III正确
∙C.只有II和IV正确
∙D.只有I和IV正确
得分:
5
知识点:
4.1根轨迹概念
展开解析
答案A
解析
14.
(5分)
控制系统的主要稳态性能指标是()。
∙A. 稳态误差
∙B. 相位裕量
∙C. 上升时间
∙D. 谐振峰值
得分:
5
知识点:
5.5频率特性与系统性能的关系
展开解析
答案A
解析
15.
(5分)
下列各个量中,反映系统快速性的量是()。
∙A.剪切频率
∙B.振荡次数
∙C.幅值裕量
∙D.谐振峰值
得分:
5
知识点:
5.5频率特性与系统性能的关系
展开解析
答案A
解析
16.
(5分)
自动控制系统的()是系统工作的必要条件。
∙A.动态特性
∙B.不稳定性
∙C.稳定性
∙D.稳态特性
得分:
5
知识点:
1.3对控制系统的性能要求
展开解析
答案C
解析
17.
(5分)
已知单位负反馈系统的开环传函为
,使系统稳定的K值的范围是()。
∙A.
∙B.
∙C.
∙D.
得分:
5
知识点:
4.2根轨迹的绘制规则
展开解析
答案C
解析
18.
(5分)
系统方框图如图所示,系统的稳态误差系数Kp、Kv、Ka为(),其中G1(s)=10/s(s+5),G2(s)=1/(0.1s+1)。
∙A.∞,2,0
∙B.20,2,0
∙C.0,0,0
∙D.∞,20,2
得分:
5
知识点:
3.6稳态精度分析
展开解析
答案A
解析
19.
(5分)
开环传递函数为
的系统的根轨迹与虚轴的交点为()。
∙A.±3.6
∙B.±0.6
∙C.±1.6
∙D.±2.6
得分:
5
知识点:
4.2根轨迹的绘制规则
展开解析
答案C
解析
20.
(5分)
相角条件是全根轨迹存在的()。
∙A.既非充分又非必要条件
∙B.充分条件
∙C.充要条件
∙D.必要条件
得分:
5
知识点:
4.1根轨迹概念
展开解析


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 16 农大 自动控制 原理 在线 作业
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《地质测量图绘制细则》.docx
《地质测量图绘制细则》.docx
-
《大学生健康教育教程》考试题库500题DR含答案.docx
-
《黄鹤楼送孟浩然之广陵》字词注释.docx
-
《葱爆羊肉》概要.docx
-
《面向对象程序设计》C++综合练习学生版.docx
-
《化学反应工程》课程综合复习资料.docx
-
《社会心理》网上形考参考答案.docx
-
《轮扣式支架》模板施工方案.docx
-
《团委新成员大会主持稿1》.docx
-
《三峡学典》思品七上.docx
-
《有效备课上课听课评课》读书笔记.docx
-
《土地的誓言》导学案.docx
-
1汽车维修专业人才需求调研报告.docx
-
《应用文写作》教学设计.docx
-
1级三相费控智能电能表技术规范.docx
-
17#楼机房层模板施工方案.docx
-
《稻草人》精彩读书笔记精选多篇doc.docx
-
《机械制造工艺与装备》复习资料.docx
-
《木兰从军》教案.docx
-
《神奇的毛细现象》.docx
-
《围城》读书心得精选范文1000字5篇.docx
-
《幼儿园是我家》大班教案.docx
-
1资产负债表变动情况的分析评价.docx
-
5s活动总结报告5s总结报告2篇.docx
-
《当代学生》初中文言文阅读训练篇.docx
-
《机械制造工艺学》电子教案.docx
-
《民事案件案由规定》物权纠纷案由的理解与适用.docx
-
《社会学研究方法学习心得5篇范文》.docx
-
《外商投资企业联合年检报告书》填写要求和指标说明.docx
-
《幼儿园课程论》形成性考核册答案27497.docx
-
1在直接影响物价水平的诸多因素当中.docx
-
10套普通话练习材料.docx
-
北京贸易大厦物业中心安全管理制度.docx
-
北京通州初三二模语文word解析.docx
-
表格 国家行政机关公文格式范本.docx
-
部编版小学五年级语文上册第三组教材公开课教学设计.docx
-
餐饮企业部门员工绩效考核指核标准库.docx
-
超详细机械制图教案模块7标准件与常用件.docx
-
初级会计师《初级会计实务》考前模拟卷一.docx
-
初中心理健康教育教案.docx
-
05哲学生活把握思维的奥秘.docx
-
1000吨果蔬冷库建设项目可行性研究报告书.docx
-
17春西交《结构检验》在线作业答案.docx
-
1999年全国高考英语试题及答案的.docx
-
20XX中职党群副校长述职述廉报告.docx
-
28051工作面设计方案生产防治水通防机电最终.docx
-
a数据服务项目执行流程.docx
-
IT从业者身体保养大全.docx
-
0dabai大学法语简明教程语法句型总结.docx
-
Iris数据的结果分类.docx
-
20XX文明单位创建实施方案 文明单位实施方案.docx
