 宜兴市徐舍中学功和机械能单元专项综合训练文档格式.docx
宜兴市徐舍中学功和机械能单元专项综合训练文档格式.docx
- 文档编号:22955528
- 上传时间:2023-02-06
- 格式:DOCX
- 页数:33
- 大小:496.22KB
宜兴市徐舍中学功和机械能单元专项综合训练文档格式.docx
《宜兴市徐舍中学功和机械能单元专项综合训练文档格式.docx》由会员分享,可在线阅读,更多相关《宜兴市徐舍中学功和机械能单元专项综合训练文档格式.docx(33页珍藏版)》请在冰豆网上搜索。
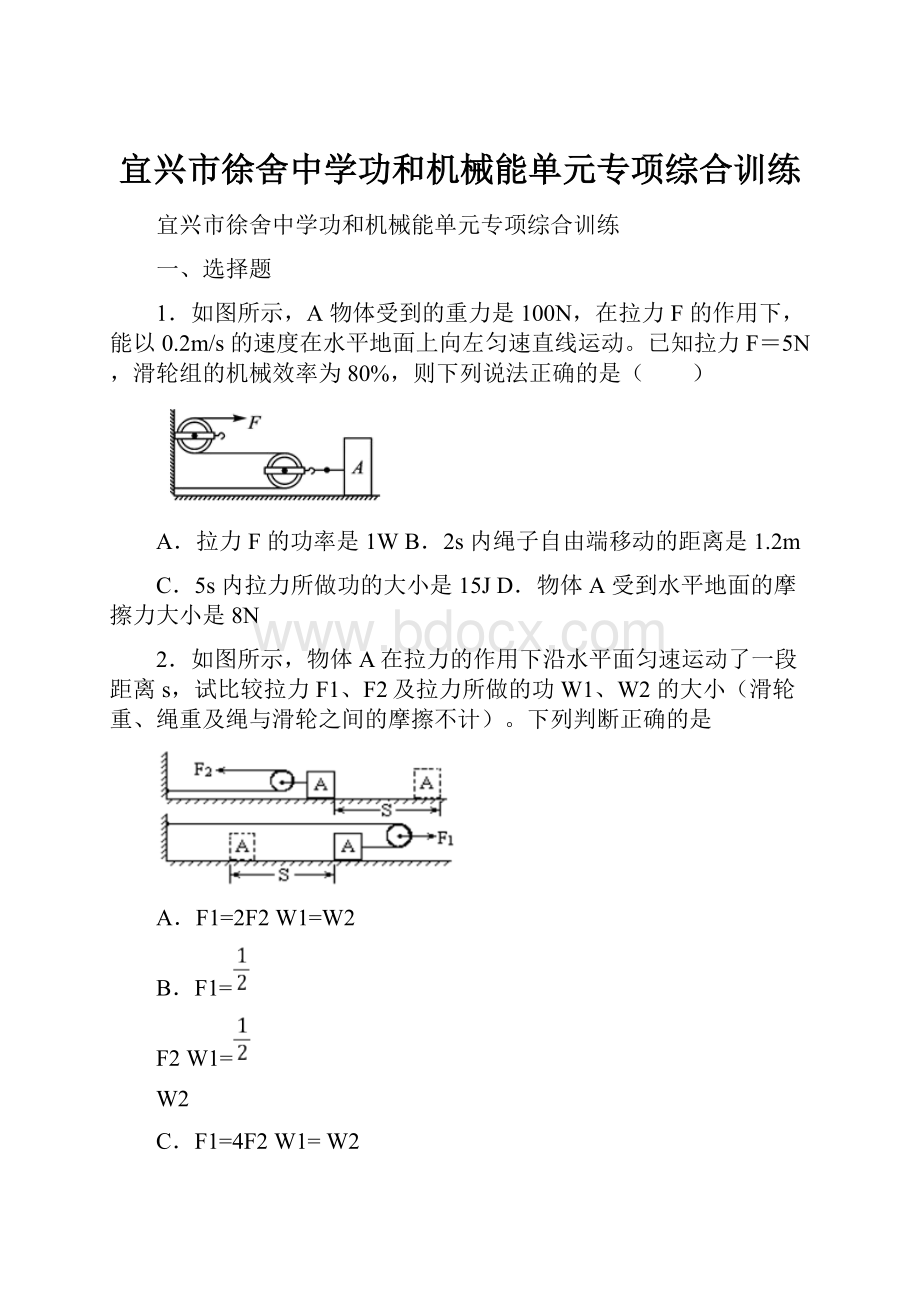
A.绳子对m2的拉力大小为m2g
B.绳子对m1的拉力大小为m1g
C.弹簧中拉力大小为(m1-m2)g
D.地面对m3的支持力大小为(m2+m3-m1)g
9.关于功率和机械效率,下列说法正确的是
A.机械效率高的机械,功率一定大
B.做功时间长的机械,功率一定小
C.所有机械的机械效率都小于1
D.功率大的机械,做功一定多
10.如图自行车是人们最常见的交通工具,从自行车的结构和使用来看,它应用了许多物理知识。
下列说法中不正确的是
A.刹车系统应用了杠杆及摩擦的知识
B.车把相当于费力杠杆
C.脚蹬属于省力杠杆
D.轮胎制有花纹是为了增大摩擦
11.如图所示,一轻质杠杆支在支架上,OA=20cm,G1为边长是5cm的正方体,G2重为20N,当OC=10cm时,此时G1对地面的压强为2×
104Pa,现用一水平拉力,使G2以2cm/s的速度向右匀速速运动,当G1对地面的压力恰好为0时,经过的时间是()
A.25sB.30sC.35sD.40s
12.用同种材料制成的物体A和B,分别挂在杠杆的两端,且GA>GB,此时杠杆平衡,如图(a)所示,若将两物体全部浸入水中,如图(b)所示,杠杆将会()
A.A物体下移,B物体上移B.A物体上移,B物体下移C.仍将保持平衡D.无法判断
二、填空题
13.如图所示的两种情况中,OB=AB,物体均重为G,两轻质杠杆均处于水平平衡状态,比较力F、
的大小,满足关系式__________。
14.为将放置在水平地面上、重为90N的重物提升到高处.小桂同学设计了图(甲)所示的滑轮组装置.当小桂所用的拉力F随时间t变化的图象如图(乙)所示,重物的速度v随时间t变化的图象如图(丙)所示.不计摩擦和绳重,绳对滑轮的拉力方向均可看成在竖直方向.物体离开地面匀速上升时,小桂的拉力F=____N;
若重物与地面的接触面积S=500cm2,在0~1s内,重物对地面的压强为________Pa.
15.杠杆AB可绕支点O自由转动,AO:
OB=3:
4.将金属块M用细绳悬挂在杠杆A端,B端通过细绳与动滑轮相连,动滑轮上绕有细绳,细绳一端固定在地面上,自由端施加拉力F1使杠杆水平平衡如图所示:
若将物体M浸没到水中,需要在动滑轮细绳自由端上施加拉力F2才能使杠杆再次水平平衡,F1与F2的差为60N,已知物体M所受重力为880N,则物体M的密度是________kg/m3.(g取10N/kg)
16.如图所示,不计绳子、滑轮的重力及它们之间的摩擦,当用大小为10N的拉力F拉重50N的物体时,物体恰好以v=2m/s的速度沿水平面做匀速直线运动,此时物体受到水平面的摩擦力为________N,拉力F的功率为________W;
将拉力F增大为20N时,物体受到水平面的摩擦力将________(选填“增大”、“减小”或“保持不变”)。
17.图中所示是自行车上两个典型的轮轴装置,从图中可知脚踏板与________组成了一个________轮轴,飞轮与________组成了一个________轮轴.
18.如图所示,小明用一个滑轮组匀速提升重为200N的物体,物体在4s内上升2m的过程中,人所用的拉力为125N.此过程中,小明做的额外功是________
J,拉力的功率是________W,滑轮组的机械效率是________.
19.如图所示,搬运工人用滑轮将重为425N的重物匀速提升4m,所用拉力为250N,时间为20s.则此过程中总功是______J,拉力的功率是______W,滑轮的机械效率是______.
20.如图长2m的粗细和密度都均匀的光滑金属杆可绕O点转动,杆上有一光滑滑环,用竖直向上的测力计拉着滑环缓慢向右移动,使杆保持水平状态,测力计示数F与滑环离开O点的距离S的关系如图所示,则杆重________N;
当滑环滑到图中A点时,金属杆是一个________杠杆(选填“省力”、“费力”或“等臂”).
三、实验题
21.小明利用如图所示的装置来探究“杠杆的平衡条件”。
(1)实验过程中应将杠杆调节到______位置平衡,这样做是为了消除杠杆自重对实验的影响和便于______。
如果杠杆左端向下倾斜,则应将平衡螺母向______(选填“左”或“右”)端调节;
(2)杠杆平衡后,在A点挂3个相同的钩码,再在B点挂______个相同的钩码,就可使杠杆重新在水平位置平衡;
(3)在
(2)杠杆平衡的基础上,将A、B两点下方所挂的钩码同时朝远离支点O的方向各移动一小格,则杠杆的______(选填“左”或“右”)端将下沉。
22.小明利用如图所示的装置探究杠杆平衡条件。
(1)为排除杠杆自重对实验的影响,实验前把杠杆中心支在支架上,杠杆静止在图甲所示位置,此时应将杠杆右端的螺母向________调节(填“左”、“右”),使杠杆在水平位置达到平衡。
这样做的目的是___________。
(2)实验时,小明在杠杆左侧A位置(左边位置第四格)先挂了3个钩码,如图乙,则在右侧B位置(右边位置第三格)应挂________个相同规格的钩码,杠杆可以重新在水平位置平衡。
(3)如图丙,小明在A位置挂一个弹簧测力计,在B位置挂了2个钩码。
现将弹簧测力计从C位置移到D位置,在此过程中杠杆始终在水平位置保持平衡,则弹簧测力计示数________(选填“变大”、“变小”或“不变”),原因是_____________。
23.小明用如图所示的装置探究杠杆的机械效率,每个钩码的质量为m,O为支点.
(1)他将2只钩码悬挂在B点,在A点竖直向上匀速拉动弹簧测力计,拉力为F1,测得A、B两点上升的高度分别为h1、h2,则此次杠杆的机械效率为η=________.(用物理量的符号表示)
(2)他将2只钩码悬挂在C点,在A点竖直向上匀速拉动弹簧测力计,使C点上升高度与第一次相同,则弹簧测力计的示数将________(选填“>”、“=”或“<”)F1,此次弹簧测力计做的功将________(选填“>”、“=”或“<”)第一次做的功.
(3)如果他想探究杠杆机械效率与物重的关系,在上述
(1)实验基础上,接下来他应将3只钩码悬挂在________点(填“B”或“C”),并使钩码上升________高度(填“相同”或“不同”),测出拉力和A点移动的距离.
24.在探究杠杆平衡条件的过程中,我们把支点放在质地均匀的杠杆中间,这样做的目的是________;
同学们通过多次实验,得出以下数据,分析得出杠杆的平衡条件是________,应用杠杆的平衡条件,表中第4次所缺数据为________.
小华是采用在杠杆两侧挂钩码的方法探究的,所以根据实验情况她得出的结论是:
“动力×
支点到动力作用点的距离=阻力×
支点到阻力作用点的距离”.在与同学交流时,小敏同学指出了她的错误,并利用如图所示的装置,进行了一个简单的操作就帮助小华解决了困惑.小敏的操作是________.
25.在“探究影响滑轮组机械效率的因素”实验中,某实验小组用如图所示的同一滑轮组提升不同的钩码,分别做了甲、乙、丙3组实验,实验数据记录如下:
次数
钩码重/N
钩码上升
的距离/cm
弹簧测力计
的示数/N
升的距离/cm
机械效率
第1次
2
5
1
15
67%
第2次
4
1.7
第3次
6
2.4
83%
(1)在实验操作中应该使弹簧测力计_____(选填“匀速”、“加速”或“减速”)竖直提升;
(2)进行第2次测量时,滑轮组的机械效率约为_____;
(3)进行第3次测量时,滑轮组做的有用功是_____J;
(4)分析实验数据,实验小组得出的实验结论是:
滑轮组的机械效率与_____有关;
(5)请在丁图画出此滑轮组既能省力又能改变力的方向的绕绳方法_____,若不计摩擦及绳重,这种绕线方法与实验时用的绕线方法相比,提升相同的物体时,滑轮组的机械效率_____(选填“变大”、“变小”或“不变”)。
26.在“探究影响滑轮组机械效率的因素”实验中,某同学用图所示的同一滑轮组分别做了三次实验,实验数据记录如表:
实验序号
钩码上升的距离/cm
弹簧测力计的读数/N
弹簧测力计上升的距离/cm
8
0.8
24
83.3%
1.5
①______
3
10
②______
③______
90.9%
(1)在表中的空格处填上适当的数据(机械效率用百分数表示,保留一位小数);
(2)在实验操作中,应竖直向上______拉动弹簧测力计;
(3)从实验数据分析可得出:
使用同一滑轮组,______可以提高滑轮组的机械效率;
(4)滑轮组的机械效率可能还与其它因素有关,请你做出恰当的猜想:
滑轮组的机械效率可能还与______有关(写出一种影响因素即可);
(5)若不考虑绳重的摩擦,本实验序号1中动滑轮的重为______N。
【参考答案】***试卷处理标记,请不要删除
1.D
解析:
D
【详解】
A.由图可知,连接动滑轮绳子的股数n=2,则绳端移动的速度
v绳=nvA=2×
0.2m/s=0.4m/s
拉力F的功率
故A错误;
B.2s内绳子自由端移动的距离
s绳=v绳t1=0.4m/s×
2s=0.8m
故B错误;
C.5s内绳子自由端移动的距离
s绳′=v绳t2=0.4m/s×
5s=2m
拉力做的功
W=Fs绳′=5N×
2m=10J
故C错误;
D.由
物体A受到水平地面的摩擦力大小
f=nηF=2×
80%×
5N=8N
故D正确。
故选D。
2.C
C
物体A在两种情况下的摩擦力f相等,上图滑轮是动滑轮,下图滑轮的轴固定不动,可以看做是特殊使用的定滑轮。
则:
F1=2f
F2=
f
故:
F1=4F2
根据功的公式可知:
W1=F1×
s=2f×
s=fs
W2=F2×
2s=
f×
2s=fs
W1=W2,故选C。
3.D
AB.原来平衡时,m1gl1=m2gl2,
由图知,l1>l2,所以m1<m2,
设移动相同的距离∆l,则左边:
m1g(l1−△l)=m1gl1−m1g△l,
右边:
m2g(l2−△l)=m2gl2−m2g△l,
因为m1<m2,所以m1△lg<m2△lg,
则m1(l1−△l)g>m2(l2−△l)g,则杠杆的左端向下倾斜,故AB错误;
CD.因为m1(l1−△l)g>m2(l2−△l)g,故往右边加入货物后杠杆平衡,
即:
m1(l1−△l)g=(m2+m)(l2−△l)g,
且m1gl1=m2gl2,
得m=(m2−m1)
,故C错误,D正确.
4.D
【解析】
【分析】
(1)使用机械时,有用功与总功的比值叫机械效率;
(2)物体在单位时间完成的功叫功率;
(3)由功的原理可知使用任何机械都不省功。
A、功率越大,表示机械做功越快,单位时间内做的功越多,但机械效率不一定就高,故A错误;
B、从
可知,有用功多,机械效率的大小还要看总功的大小。
C、从
可知,工作时间短,功率的大小还要看做功的多少,故C错误;
D、利用机械做功时可以省力或省距离,但不能省功,故D正确。
故选:
D。
5.A
A
(1)对滑块进行受力分析,根据光滑斜面可得,滑块不受摩擦力作用,因此滑块只受重力和支持力作用;
(2)近视眼成因:
眼球晶状体的曲度过大,远处物体反射来的光线通过晶状体折射后形成的物像,就会落在视网膜的前方造成近视眼。
近视矫正方法,需佩戴凹透镜。
(3)磁感线都是从北极出发回到南极;
(4)力臂的概念:
力臂是指从支点到力的作用线的距离。
A、滑块被固定在光滑斜面底端的压缩弹簧弹出后沿斜面向上运动,是因为滑块具有惯性,因为斜面光滑,所以不受摩擦力的作用,只受到竖直向下的重力和垂直于斜面向上的支持力作用,故A错误;
B、近视眼成因:
故B正确;
C、在磁体外部,磁感线的方向都是从N极出发回到S极,故C正确;
D、由图可知,杠杆的支点为C,吊桥所受拉力的力臂是从C到拉力作用线的垂线段,故D正确。
A。
6.D
用一个动滑轮和两个定滑轮组成的滑轮组竖直向上提升物体A,要求滑轮的个数要用完,则承担物重和动滑轮重的绳子段数为3,如图所示:
A.已知在1s~2s内,滑轮组的机械效率为80%,由甲图可知,在1~2s内拉力
,由
可得物体A的重是
B.不计绳重和摩擦,根据
得动滑轮的重是
C.由甲图知,1s后的拉力F=500N,由乙图可知1s后物体的速度
,则绳子自由端移动的速度
所以拉力F的功率
D.若将重物A的重力减小为900N,由于滑轮组不变,不计绳重和摩擦,此时滑轮组的机械效率
7.D
A、由图知,水平使用滑轮组,对于物体B来说,n=2,拉力端移动速度
,拉力做功功率
,故A正确;
B、不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦,如图弹簧测力计端由三段绳子拉着,所以示数为:
,故B正确;
C、物体A受到B向左的摩擦力为
,受到向右的拉力F1为4N,,物体A静止受力平衡,所以受到地面向右2N的摩擦力,即物体A与地面之间有摩擦力,故C正确;
D、因为A、B间的压力和接触面粗糙都不变,所以增大F2,物体B会做加速运动,但A、B间摩擦力不变仍为6N,,即A仍然保持静止,故D错误.
故选D.
点睛:
重点是平衡状态的判断,要牢记匀速运动时物体一定平衡,本题中物体A受到B的摩擦力,地面的摩擦力和拉力F2,此三个力平衡.
8.A
分析:
分别对质量为m1、m2、m3的物体进行受力分析,然后对照各选项逐一进行判断即可.
解答:
如图所示:
A、根据定滑轮工作特点可知,绳子对甲物体的拉力等于物体乙对绳子的拉力,等于乙物体的重力,所以,绳子对甲物体的拉力大小为m1g,故A错误;
B、对乙物体进行受力分析可知,此时乙物体的重力与绳子对乙物体的拉力是一对平衡力,所以,绳子对乙物体的拉力大小为m1g.故B正确;
C、弹簧中拉力为乙物体与甲物体的重力之差,即(m1-m2)g,故C正确;
D、对丙物体进行受力分析可知,物体丙受到地面的支持力、甲物体的压力(等于重力)、乙物体的拉力(等于重力)三个力的作用,地面对丙物体的支持力大小为(m2+m3-m1)g.故D正确.
故选A.
【点睛】此题考查定滑轮及其工作特点、力与运动的关系,关键是对各个物体进行正确的受力分析,有一定难度!
9.C
A.功率表示做功的快慢,机械效率表示一次做功中有用功占的比,所以功率和机械效率是两个不同的概念,没有直接的关系,故A错误;
B.功率是功与时间的比,与单独的时间没有关系,故B错误;
C.使用任何机械时,都不可避免要做额外功,所以所有机械的机械效率都小于1,故C正确;
D.根据
,做功多少不仅与功率有关,还与时间有关,故D错误;
故选C.
10.B
B
【解析】A、刹车时,人施加一个很小的力,就可以对车轮产生一个很大的摩擦力,应用杠杆和摩擦的知识,故A正确;
B、自行车的车把相当于一个以中间的轴为支点的省力杠杆,故B错误;
C、脚蹬在使用时,动力臂大于阻力臂,属于省力杠杆,故C正确.
D、轮胎制有花纹,是在压力一定时,增大接触面的粗糙程度来增大摩擦,故D正确.
故选B.
11.A
根据杠杆的平衡条件,当OC=10cm时,G2×
OC=F×
OA,即
20N×
10cm=F×
20cm
所以F=10N。
此时G1对地面的压强为2×
104Pa,即
=2×
104Pa
其中
S=0.05m×
0.05m=2.5×
10-3m2
代入前面的式子得,G1=60N。
当G1对地面的压力为0时,G1×
OA=G2×
l,即
60N×
20cm=20N×
l
解得l=60cm,根据题意有OC
vt=l,即
10cm
2cm/s·
t=60cm
所以t=25s,故BCD不符合题意,A符合题意。
故选A。
12.C
杠杆两端分别挂上体积不同的两个金属块A.B时,杠杆在水平位置平衡.因为杠杆平衡,m=ρV,所以GA×
OA=GB×
OB,mAg×
OA=mBg×
OB,ρVAg×
OA=ρVBg×
OB,即:
VA×
OA=VB×
OB;
若将两球同时浸没在水中,则:
左端=(ρVAg−ρ水VAg)×
OA=ρVAg×
OA−ρ水VAg×
OA,右端=(ρVBg−ρ水VBg)×
OB=ρVBg×
OB−ρ水VBg×
OB,
又因为VA×
OB,所以ρ水VAg×
OA=ρ水VBg×
OB,即ρVAg×
OB,因此杠杆仍然平衡.
13.【详解】
在左图中,LOB是阻力臂,LOA是动力臂,因为LOB=LAB,所以
又因为所以
右图中,LOB是动力臂,LOA是阻力臂,因为,所以
由①②可知。
又因为
所以
右图中,LOB是动力臂,LOA是阻力臂,因为
,所以
由①②可知
。
14.600
第一空.由图丙可知在2∼3s内,重物做匀速运动,由图乙可知,此时拉力F=40N;
第二空.从动滑轮上直接引出的绳子股数n=3,
从丙图可知,物体在2∼3s内做匀速
600
从丙图可知,物体在2∼3s内做匀速直线运动,由图乙可知此时的拉力F3=40N,
根据F=
(G物+G动)可得:
G动=nF3−G物=3×
40N−90N=30N,
在0∼1s内,拉力F1=30N,把动滑轮和重物看成整体,则这个整体受到向下的重力、向上的支持力以及三根绳向上的拉力作用处于静止状态,
F支+3F1=G物+G动,地面对物体的支持力:
F支=G动+G物−3F1=30N+90N−3×
30N=30N,
根据力的作用是相互的,重物对地面的压力:
F压=F支=30N,
对地面的压强:
p=
=600Pa。
15.5×
103
表示出两次杠杆A、B端受到的拉力,根据杠杆的平衡条件列式,解方程可得M受到的浮力大小,再根据阿基米德原理计算出物体M的体积,利用密度公式计算出M的密度.
自由端施加拉
5×
自由端施加拉力F1使杠杆水平平衡时,杠杆A端受到的拉力FA=GM,由图左侧的滑轮为动滑轮,杠杆B端受到的拉力FB=2F1+G动,
根据杠杆的平衡条件:
GM×
AO=(2F1+G动)×
OB…①
将物体M浸没到水中杠杆再次水平平衡时,
杠杆A端受到的拉力F′A=GM−F浮,
杠杆B端受到的拉力F′B=2F2+G动,
(GM−F浮)×
AO=(2F2+G动)×
OB…②
①−②可得:
F浮×
AO=2(F1−F2)×
OB
M浸没水中后由于受到浮力,对杠杆A端拉力减小,所以F1>
F2,
所以:
F浮=
=
=160N,
由F浮=ρ水gV排得M的体积:
V=V排=
=
=1.6×
10−2m3
所以M的密度:
ρ=
=5.5×
103kg/m3
16.40不变
使用动滑轮可以省一半力;
物体匀速运动,受平衡力,平衡力大小相等,判断出摩擦力根据绳子段数判断出绳子的速度;
根据算出拉力F的功率;
影响摩擦力的因素:
压力和接触面
40不变
【


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 宜兴市 中学 机械能 单元 专项 综合 训练
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《城市规划基本知识》深刻复习要点.docx
《城市规划基本知识》深刻复习要点.docx
-
《高电压技术》word版.docx
-
《安全带》gb6095.docx
-
BCP计划应急计划.docx
-
《计算机组成与工作原理》第一章复习题.docx
-
CANON LBP系列激光打印机使用方法指南.docx
-
C语言课程设计火车票系统源代码.docx
-
3热力管道沟槽开挖方法.docx
-
HR岗位职责.docx
-
1 脱硫脱硝cems维护技术规范.docx
-
O2O超市商业项目计划书.docx
-
SCI期刊呼吸胸外.docx
-
18岁生日祝福语短信.docx
-
ITMC物流企业经营沙盘比赛规则.docx
-
XX钢绳成本管理.docx
-
Matlab的第三方工具箱大全强烈推荐.docx
-
安全保卫工作先进个人.docx
-
安全生产工作日记.docx
-
windows 漏洞集合.docx
-
Φ160数控落地镗铣床技术规格.docx
-
安全施工组织设计.docx
-
安全检查和隐患排查治理制度及记录.docx
-
部编版小学二年级语文下册课外阅读专项.docx
-
变电站投运前质量监督检查汇报材料模版.docx
-
版 创新设计 高考总复习 历史 北师大版第一部分 必考内容第十五单元 第38讲.docx
-
本科毕业设计论文.docx
-
北京大学社会心理学串讲笔记1一10章加试题.docx
-
亳州市教坛新星骨干教师学科带头人特级教师年度考核细则知识分享.docx
-
超星尔雅《人生与人心》期末考试满分答案.docx
-
财经法规与会计职业道德案例分析题.docx
-
茶文化会发言稿.docx
-
财务会计核算实习总结.docx
-
三年级上册语文期末复习资料语文S版.docx
-
普通语言学概论.docx
-
《建设工程施工承包合同》示范文本.docx
-
最新小学二年级数学上册计算题.docx
-
学年第二学期七年级英语试题.docx
-
高一生物第二学期期中联考试题.docx
-
表音密码教学法在提高农村高一学生英语词汇拼读效率方面的运用.docx
-
妇产护理模拟习题锦集.docx
-
最新沈阳工学院经管管理会计题库第四章.docx
-
大一英语学习期末总结.docx
-
河北省衡水中学届高三上学期四调考试理科数学试题.docx
-
出境旅行意外伤害保险版定稿北京.docx
-
山东省济南外国语学校高三模拟考试生物试题含答案.docx
-
全国高考语文试题及答案辽宁.docx
-
最新地下室底板设计.docx
-
高考试题英语江苏卷解析版.docx
-
Unit8Howwasyourschooltrip作业.docx
-
单位工程质量评估报告.docx
-
三分离财政管理体制改革中预算编制模式.docx
