 状态反馈的倒立摆PID控制.docx
状态反馈的倒立摆PID控制.docx
- 文档编号:2293816
- 上传时间:2022-10-28
- 格式:DOCX
- 页数:11
- 大小:223.79KB
状态反馈的倒立摆PID控制.docx
《状态反馈的倒立摆PID控制.docx》由会员分享,可在线阅读,更多相关《状态反馈的倒立摆PID控制.docx(11页珍藏版)》请在冰豆网上搜索。
状态反馈的倒立摆PID控制
基于LMI的单级倒立摆的状态反馈PID控制
摘要
本文以单级倒立摆为研究对象,通过物理规律得到系统的传递函数和状态方程,并结合状态反馈的概念,将约束条件转化为线性矩阵不等式求解反馈矩阵并得到PID控制器,最后进行MATLAB仿真得到仿真曲线进行对比分析指出该方法的优缺点。
关键字单级倒立摆PIDMATLABLMI状态反馈
前言
倒立摆系统是一种典型的非线性的,不稳定的复杂系统。
是控制理论教学与科研中研究诸如鲁棒问题、非线性系统的控制等问题的良好实验对象。
同时,倒立摆系统作为机器人行走中平衡控制、火箭垂直姿态控制和卫星飞行中姿态控制的最简单模型在航空航天以及军工等领域有着广泛的用处。
倒立摆可以根据摆杆数量的不同分为一级、二级和三级等,多级摆杆间采用自由连接。
一级倒立摆的仿真与控制已广泛应用于教学科研,而二级倒立摆也已在大部分实验室中实现,至于三级倒立摆的控制问题则是国际上公认的难题。
然而我国学者李洪兴教授在2002年实现了国际上首次四级倒立摆实物系统的控制,这是我国学者采用自己提出的理论完成世界性难题的重大科学成就。
本文中以单级倒立摆为研究对象,根据物理定律进行建模得到数学模型,在此基础上进行PID控制,并通过MATLAB仿真对比加入PID控制器前后的响应曲线进行分析。
数学模型的建立
直线一级倒立摆是由小车、摆杆等部件构成。
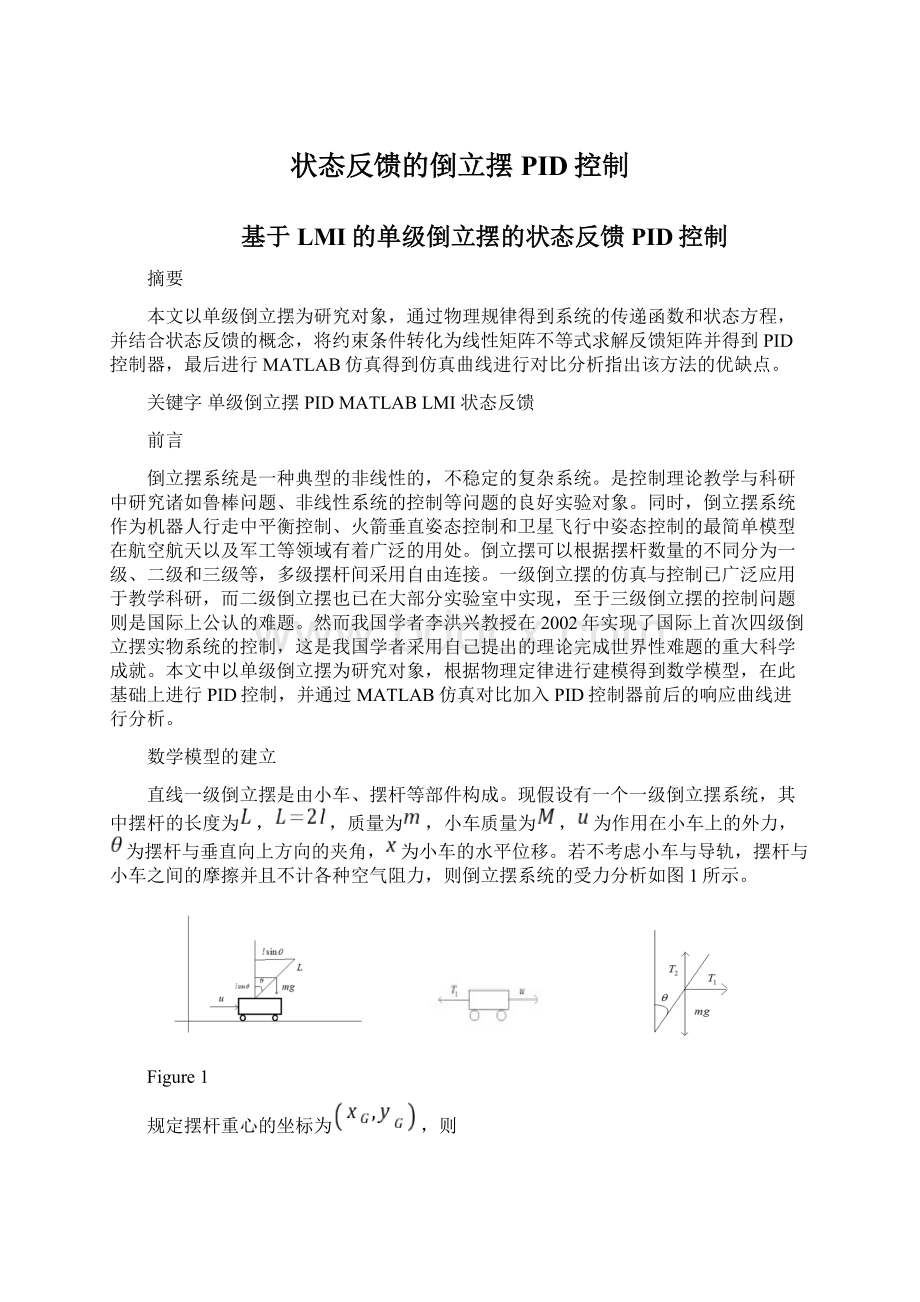
现假设有一个一级倒立摆系统,其中摆杆的长度为,,质量为,小车质量为,为作用在小车上的外力,为摆杆与垂直向上方向的夹角,为小车的水平位移。
若不考虑小车与导轨,摆杆与小车之间的摩擦并且不计各种空气阻力,则倒立摆系统的受力分析如图1所示。
Figure1
规定摆杆重心的坐标为,则
采用隔离法,对小车有
(1)
其中为摆杆所受沿水平方向的力。
对于摆杆,在水平方向上有
(2)
在竖直方向上有
(3)
其中为摆杆所受沿垂直方向的力。
以摆杆质心为旋转中心建立动力学方程有
(4)
其中为摆杆绕其质心的转动惯量。
此时,发现
(2)(3)(4)均为非线性方程,为了简化计算并且便于进行控制器设计,要对上述方程进行近似线性化处理。
由于控制目标是使摆杆处于垂直稳定状态,即尽可能的小,甚至接近于,因此可以认为、、、。
这里需要注意
,
因此方程
(2)(3)(4)化为
(5)
(6)
(7)
消去中间变量、,由
(1)(5)式得到
(8)
由(6)(7)式得到
(9)
由(8)(9)得到单级倒立摆方程
(10)
(11)
设小车的质量为,摆长为,摆杆质量为,重力加速度取带入上述方程,可以得到角度与外力之间的传递函数,
(12)
由于系统有位于复平面右半平面的极点显然其不稳定,在阶跃函数作用下的响应的响应曲线如下图所示,同样说明系统是不稳定的,因此需要加入PID控制来改变系统的性能。
Figure2
状态反馈PID设计
令,,,建立状态方程,则由(10)(11)可得倒立摆系统的状态方程为
(13)
其中,,,
接下来我们要用状态反馈的方法设计此倒立摆系统的PID控制器。
采用文献[4]的方法,在控制输入点之前引入一个积分环节,其中给定。
记
,,
因此得到增广系统的状态方程
(14)
设状态反馈
(14)
(16)
因为,则可逆,从而可以将控制输入用状态及状态的导数表示,即
(17)
将上式代入(16)式中,得到
(18)
记为,为,在零初始条件下对上式积分得到
(19)
可以看出这是状态反馈加状态积分反馈的形式。
如果能够找到一组状态变量,使得状态反馈就是比例积分加微分,那么该状态反馈策略就是PID控制。
对于阶系统,微分部分包括了系统从阶到阶的微分;若是二阶系统,该部分就是一个工程中常用的PID控制器。
现在讨论反馈增益矩阵,使得增广系统满足稳定的指标。
即设计反馈矩阵使得闭环系统稳定。
此时闭环系统的状态方程为
(20)
根据Lyapunov理论可得,存在对称正定矩阵使得
(21)
在上式左右两边左乘,右乘,并令则得到
(22)
这是关于与的线性矩阵不等式,又由于正定则正定,因此上述LMI可以改写为
(23)
通过MATLAB可以求得与,由此可以解出对称正定矩阵与反馈增益。
下面通过MATLAB进行仿真和计算。
仍然采用之前仿真时使用的小车质量与摆杆质量等数据,可以得到增广系统的状态方程的系数为
,
通过MATLAB计算可得反馈增益为,因此
,,代入控制器的表达式中得到,仿真曲线图如下所示。
Figure3
Figure4
Figure5
Figure6
Figure7
结论
由图2可知系统在没有控制其作用下是不稳定的,通过状态反馈PID控制之后的系统状态的响应曲线分别为图3~6,可以看出,只在稳定的约束下,系统的四个状态可以在18秒左右达到稳定,证明方法的可行性。
同时也发现了只对稳定性约束时的不足,即系统达到稳定所需的时间过长,为此可以在考虑稳定性的条件下加入其他指标进行约束以达到预期的效果,例如极点指标、方差指标、指标等,甚至可以进行多指标约束,例如极点指标加方差指标等。
求解时需要将这些指标化为线性矩阵不等式组,运用MATLAB求解满足需求的解。
讨论与体会
在我之前的认识中,对于PID只理解到自动控制原理中通过对超调量等指标的约束画出伯德图进行求解参数的阶段。
后来学习了状态空间描述系统时,就思考如何在状态方程的基础上进行PID控制器设计,因此借此计控作业的机会查找资料学习了一下。
在这个作业中我还用到了一些这学期学到知识,例如线性矩阵不等式的求解和系统稳定性分析。
在学习了线性矩阵不等式后也借此机会实践了一下其中的变量替换和MATLAB求解,同时也是第一次听到满意控制这个概念。
因此可以说这次作业不仅仅是计算机控制的作业也从一定程度上说是对这学期的小小总结,同时在这之中也发现还有很多需要学习的地方。
参考文献
1.张嗣瀛,高立群.现代控制理论[M].北京:
清华大学出版社,2006
2.关守平,尤富强.计算机控制理论与设计[M].北京:
机械工业出版社,2012
3.张庆灵,张雪峰,翟丁.控制理论基础[M].北京:
高等教育出版社,2008
4.马建伟,李银伢.满意PID控制设计理论与方法[M].北京:
科学出版社,2007
5.周俊.PID控制在单级倒立摆系统中的分析与应用[J].硅谷,2010,6:
20-21
6.王慧萍,孔庆忠.基于MATLAB的直线一级倒立摆的PID控制研究[J].机械工程与自动化,2015,5:
179-182
7.薛定宇.控制系统计算机辅助设计[M].北京:
清华大学出版社,2015
8.王建辉,顾树生.自动控制原理[M].北京:
清华大学出版社,2013
附录:
代码
clearall
num=[-0.74];
den=[10-15.56];
G=tf(num,den);
t=[0:
0.1:
20];
[y,x,t]=step(num,den,t);
figure
(1);
plot(t,y);
grid;
xlabel('t');
ylabel('y');
title('单位阶跃响应曲线')
%角度对输入的传递函数的阶跃响应曲线
a=[0,1,0,0,0;15.56,0,0,0,-0.74;0,0,0,1,0;-0.37,0,0,0,0.49;0,0,0,0,0];
b=[0;0;0;0;1];
setlmis([])
%开启LMI求解
Q=lmivar(1,[5,1]);
L=lmivar(2,[1,5]);
%定义矩阵变量
lmiterm([111Q],a,1,'s');
lmiterm([111L],b,1,'s');
lmiterm([122Q],-1,1);
%描述线性矩阵不等式
lmisys=getlmis;
[tmin,xfeas]=feasp(lmisys);
QQ=dec2mat(lmisys,xfeas,Q);
LL=dec2mat(lmisys,xfeas,L);
K=LL*inv(QQ)
%解出反馈矩阵K
%状态方程
c=[0,0,0,0,0];
d=[0];
g=ss((a+b*K),b,c,d);
t=[0:
0.1:
20];
x0=[0,0,1,0,0];
[y,t,x]=initial(g,x0,t);
figure
(2)
plot(t,x);
holdon
gridon
%得到增广系统的状态响应曲线
figure(3)
plot(t,x(:
1)),grid;
xlabel('t'),ylabel('角度'),title('摆角随时间变化的曲线');
figure(4)
plot(t,x(:
2)),grid;
xlabel('t'),ylabel('角速度'),title('角速度随时间变化的曲线');
figure(5)
plot(t,x(:
3)),grid;
xlabel('t'),ylabel('位移'),title('小车位移随时间变化的曲线');
figure(6)
plot(t,x(:
4)),grid;
xlabel('t'),ylabel('速度'),title('小车速度随时间变化的曲线');
figure(7)
plot(t,x(:
5)),grid;
xlabel('t'),title('控制器变化曲线');


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 状态 反馈 倒立 PID 控制
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 转基因粮食的危害资料摘编Word下载.docx
转基因粮食的危害资料摘编Word下载.docx
-
高中英语词组大全Word文档下载推荐.docx
-
卫计局年工作总结及新年工作计划Word格式.docx
-
贵州省煤矿安全管理人员安全资格证A考试概况Word格式.docx
-
系统集成项目招标文件Word文件下载.docx
-
电子商务考试题总汇打印版打印打印Word下载.docx
-
选调生考试备考言语理解与表达真题Word文档格式.docx
-
高考物理实验题专练 专练15Word文档格式.docx
-
加装奥迪A4L蓝牙电话功能Word文档下载推荐.docx
-
学年下学期好教育高三月考仿真卷A卷 语文 学生版后附详解Word文档下载推荐.docx
-
净化生产车间工程一般施工技术施工方案Word文档格式.docx
-
内蒙古呼和浩特市第六中学学年高一政治下学期期末考试试题Word下载.docx
-
证券行业客户经理电话营销技巧与实例Word文档下载推荐.docx
-
叶芝 苇间风文档格式.docx
-
最新中美贸易摩擦的原因及解决对策1论文Word文件下载.docx
-
意义的近义词Word格式文档下载.docx
-
上海市中考英语试题S.docx
-
专题12观点论证类设问.docx
-
附加安心重疾条款.docx
-
设计变更管理办法修改意见稿FINAL汇编.docx
-
毕业赠言毕业致词精选多篇.docx
-
银行新员工代表发言稿精选多篇.docx
-
北京市朝阳区届高三第一学期期末语文试题Word版含答案.docx
-
HL线切割使用说明书模板.docx
-
车工实训周记.docx
-
USBHID键盘扫描码.docx
-
Apmpoqu4调研报告.docx
-
最熟悉的陌生人作文八篇.docx
-
被动语态综合讲解.docx
-
部编版语文七上第五单元16猫同步练习试题.docx
-
软件体系结构作业2.docx
-
钢管管道安装焊接施工工艺.docx
 园林工程施工组织与管理 教学课件 作者 吴立威PPT推荐.pptx
园林工程施工组织与管理 教学课件 作者 吴立威PPT推荐.pptx
-
XXXX政府门户网站维护项目运维方案Word文档格式.docx
-
冀教版一年级起点小学六年级英语上册全套PPT课件PPT格式课件下载.pptx
-
【实用型文档】北方某市养老院暖通空调方案设计Word文件下载.docx
-
土壤修复原理与技术PPT课件下载推荐.pptx
-
七年级数学上册教案有最新的三维目标Word格式.docx
-
2019年高考生物一轮复习课件(最全版)501-1000PPT格式课件下载.pptx
-
部编人教版小学语文三年级上册全册精品教案Word格式.docx
-
小学语文S版五年级下册全册教案Word文件下载.docx
-
小学优育二年级教案全册Word文档下载推荐.docx
-
无为磊达水泥生产线施工组织设计Word格式.docx
-
人教版语文一年级下册语文教案全册Word文件下载.docx
-
北师大版小学六年级语文上册教案Word下载.docx
-
数学中几何辅助线的常规作法集锦Word格式.docx
-
决策理论与方法(第二版) 郭立夫 郭文-强 李北伟-全套课件PPT课件下载推荐.pptx
-
冀教版一年级起点小学五年级英语上册全套PPT课件PPT文档格式.pptx
-
苏教版小学语文五年级上册全册教案文档格式.docx
-
完整打印版小学一年级体育上册教案图文Word格式文档下载.docx
-
《企业会计制度》会计科目使用说明Word文件下载.docx
