 机器人实训报告Word文档下载推荐.docx
机器人实训报告Word文档下载推荐.docx
- 文档编号:22742418
- 上传时间:2023-02-05
- 格式:DOCX
- 页数:23
- 大小:2.22MB
机器人实训报告Word文档下载推荐.docx
《机器人实训报告Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《机器人实训报告Word文档下载推荐.docx(23页珍藏版)》请在冰豆网上搜索。
8、实践的心得与建议;
9、参考资料。
工业机器人项目综合训练
小组成员周群策张煜浩邵辰彤李冰冰周磊22刘延刚李甲
一、系统框图及功能描述
(一)、系统框图
计算机与PLC及触摸屏进行通讯,将PLC程序和触摸屏程序分别导入。
通过触摸屏的控制按钮操控PLC程序中软元件的开闭状态来控制是否调用机器人程序从而控制机器人的动作,机器人由示教编程,程序存储在示教盒内由PLC程序控制其调用。
(二)、Fanuc机器人
Fanuc机器人硬件主要包括:
机器人本体(Robot),控制柜(包括用户操作面板),示教盒(TeachPendant)等。
主要功能包括:
Arcwelding(弧焊),Spotwelding(点焊),Handling(搬运),Sealing(涂胶),Painting(喷漆),Palleting(码垛),Assembling(装配),去毛刺,切割,激光焊接,测量等。
(三)、PLC(可编程序控制器)
PLC的定义:
可编程序控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字式、模拟式的输入和输出,控制各种类型的机械或生产过程。
可编程序控制器及其有关设备,都应按易于使工业控制系统形成一个整体,易于扩充其功能的原则设计。
PLC是一种用程序来改变控制功能的工业控制计算机,除了能完成各种各样的控制功能外,还有与其他计算机通信联网的功能。
系统构成(功能扩展板块/连接器转换适配器/存储器盒/显示模块的系统组成)
功能扩展板块,连接器转换适配器,存储器盒,显示模块的组合,可以连接的位置,台数,无论基本单元的点数如何,均如下所示。
1.FX3u-16MR/ES-A,FX3u-32MR/ES-A
2.端子排列
3.输入连线示例
4.威纶通触摸屏
威纶通系列触摸面板全线内置电源隔离保护器,触摸屏均为电阻屏,支持MPI187.5K连接,常规产品分辨率均为800×
480以上,均采用EB8000同一套软件,具有强大的兼容能力,能适用于市面上95%常见的PLC、变频器、工控机等自动化设备。
二、电路原理图(电气部分的说明)
(1)Plc外部线路连接
(2)CRM2A/B与外围设备的连接
CRM2A输入CRM2A输出
CRM2B输入CRM2B输出
(3)、气动原理图
(4)、列出PLC及机器人I/O分配表,编写PLC程序(包括注释)
(1)、PLC及机器人I/O分配表:
机器人输出
PLC输入
功能定义
机器人输入
PLC输出
CRM2B(33)
DO[1]
X1
电磁阀信号
CRM2A(01)
*TMSTP
Y10
紧急停机信号
CRM2A(35)PROGRUN
X5
程序执行输出信号
Y4
气阀
CRM2B(35)
DO[3]
X11
按步输出
CRM2A(04)
CSTOP1
Y0
安全速度信号
CRM2B(36)
DO[4]
X12
计数复位
CRM2A(10)PNS4
Y1
程序号选择
CRM2A(39)FAULT
X7
错误输出
CRM2A(28)
ENBL
Y7
使能信号
CRM2A(06)START
Y6
启动信号
CRM2A(29)PNSSTROBEPN
Y2
滤波信号
CRM2A(25)
FAULTRESET
Y5
报警复位
信号
(2)、软元件分配表
软元件
定义
M20
总开关
M15
复位
M30
开始执行
M40
跳出
M10
单步连续切换
M50
报警灯
M12
暂停
M13
继续
接线图:
(三)、威纶触摸屏编程界面
总开关:
控制PLC程序;
急停:
机器人紧急停止;
暂停:
机器人暂停;
复位:
解除警报;
运行状态切换:
切换运行状态(自动/单步);
执行:
调用执行示教程序
操作过程:
首先打开总开关,点击复位按钮。
运行状态切换开关控制机器人的自动/单步运行。
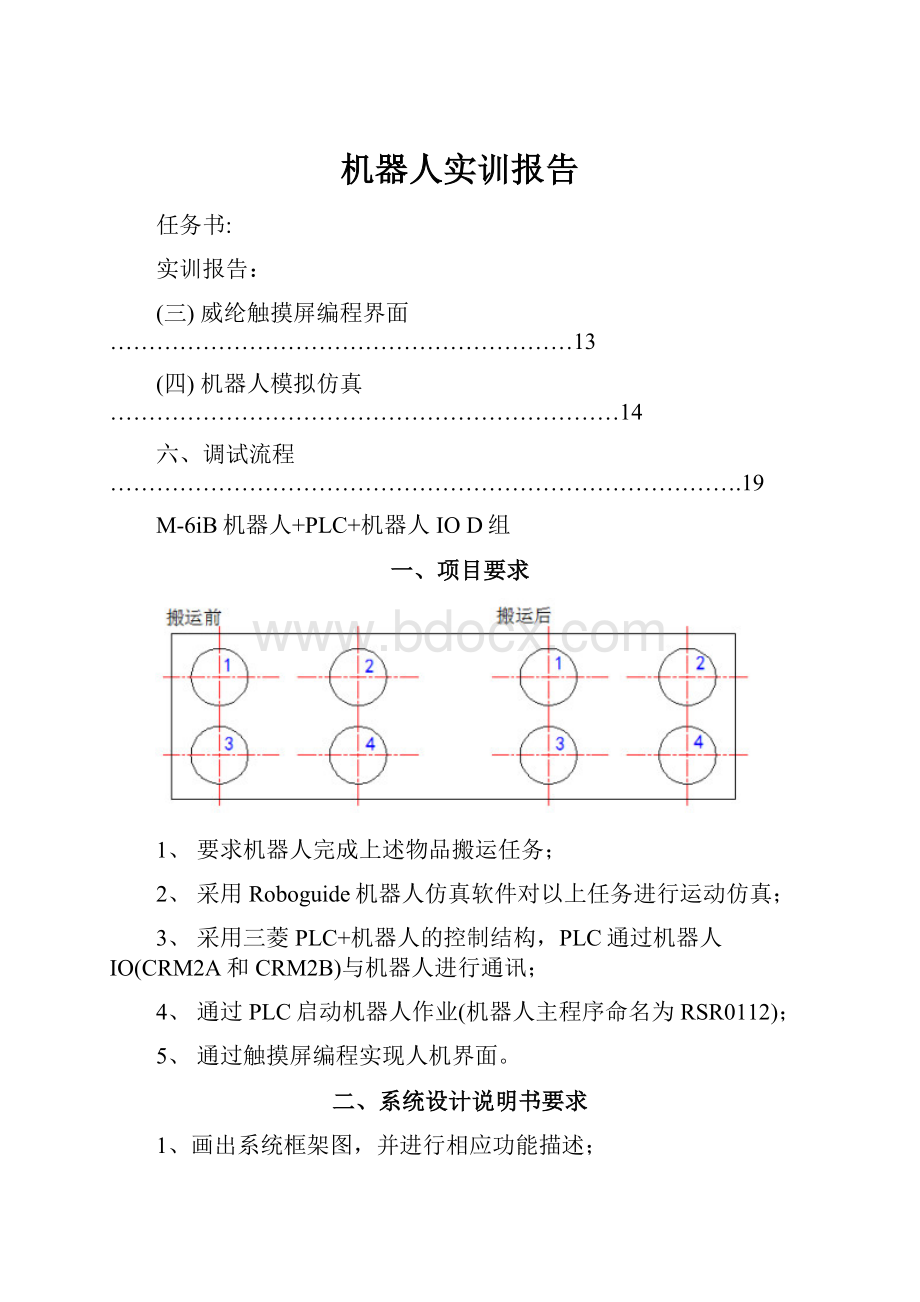
自动运行时,机器人自动将4个工件依次由左移动至右,每移动一个工件,工件状态指示灯会跳转。
单步运行时,每移动一次工件,机器人都会暂停操作,需点击复位后再进行下一步操作。
机器人紧急停止时,报警灯亮起,点击复位按钮解除报警。
(四)、机器人模拟仿真
(五)、PLC梯形图
五、机器人程序
示教动作流程:
程序:
JP[1]100%CNT100//示教点1(螺栓1起始点)
JP[2]100%CNT100//示教点2
DO[1]=ON//气阀接通,手爪闭合
WAIT2.00(SEC)//等待2s
JP[3]100%CNT100//示教点3
JP[4]100%CNT100//示教点4
JP[5]100%CNT100//示教点5
DO[1]=OFF//气阀关闭,手爪张开
JP[6]100%CNT100//示教点6(螺栓1结束点)
JP[7]100%CNT100//示教点7(螺栓2起始点)
JP[8]100%CNT100//示教点8
JP[9]100%CNT100//示教点9
JP[10]100%CNT100//示教点10
JP[11]100%CNT100//示教点11
DO[1]=OFF//气阀关闭,手爪张开
JP[12]100%CNT100//示教点12(螺栓2结束点)
JP[13]100%CNT100//示教点13(螺栓3起始点)
JP[14]100%CNT100//示教点14
JP[15]100%CNT100//示教点15
JP[16]100%CNT100//示教点16
JP[17]100%CNT100//示教点17
JP[18]100%CNT100//示教点18(螺栓3结束点)
JP[19]100%CNT100//示教点19(螺栓4起始点)
JP[20]100%CNT100//示教点20
JP[21]100%CNT100//示教点21
JP[22]100%CNT100//示教点22
JP[23]100%CNT100//示教点23
JP[24]100%CNT100//示教点24(螺栓4结束点)
六、调试流程(包括调试过程中存在的问题、解决问题的思路及办法)
实现要求
设备连接
示教盒机器人程序编程
PLC控制调试
威伦触摸屏控制调试
优化设计
PLC程序编程
否
调试过程中,我们分别进行了如下操作:
1.将程序导入到PLC中;
2.将EB8000中绘制的触摸屏程序导入到威纶触摸屏中;
3.将威纶触摸屏的数据线与PLC相连,将PLC至于“RUN”状态;
4.点击“Enter”按钮,进入操作界面;
5.按下“启动/Run”,此时,系统进入运行状态;
6.按下“复位/RST”按钮,等待“FAULT”指示灯熄灭;
7.点击“执行/Do”按钮,系统的运行状态取决于“自动运行/单步运行”按钮的位置(两种运行模式可以在机器人运行时相互切换);
8.在“自动运行”模式时,只要点击“执行/Do”按钮,系统执行整个程序及将四颗螺钉一次全部搬至设定位置;
9.在“单步运行”模式时,点击“执行/Do”按钮,系统分四次将螺栓搬至设定位置;
每一个螺栓到位后,点击“复位/RST”按钮,等待“FAULT”指示灯熄灭,点击“继续/Continue”按钮,机器人继续搬运下一颗螺栓,直至四颗搬运完成;
10.在机器人运行的过程中,点击“暂停/Pause”按钮,可实现程序执行的暂停功能,需继续运行时,点击“复位/RST”按钮,等待“FAULT”指示灯熄灭,再点击“继续/Continue”按钮,程序继续执行,机器人继续工作。
PLC的各种功能均通过触摸屏顺利实现,调试成功。
七、实践的心得与建议
三周的实训也基本终结了我大学四年的课程,似乎来得比自己想的更早一些。
以后真的很难再回到教室,回到实验室,一组一班的这样上课,想想那些上课睡觉的日子和那些打酱油的实验似乎多了一种缅怀。
总而言之,言而总之,大学完了。
在考完研这段时间里,我总是找不到状态,或许真的考傻了,应试教育我发誓这是最后一次。
生活,生下来,活下去。
人总归要面对社会,人总归要在社会接受检验,在那里才能知道自己值多少钱。
对于一个20多岁的人,不断的学习和成长似乎比什么都要重要。
这次的实训刚刚开始不知道是受考研的影响,还是受考研的影响,对于很多熟悉的东西变得很陌生,问了很多自己后来想想都脸红的问题。
我刚开始找到前面班级同学做的PLC的程序,但是对照着看,发现我真不知道他们是怎么要机器人运动,这不科学啊。
于是丢掉了程序,开始自己动手丰衣足食,首先对机器人实行示教并用偏置编程,可是发现不走直线啊,问问其他同学,他们也出现了这种情况,最后没办法只能全部示教了。
那天下午,敲了一个简单的程序,突然发现自己的电脑不能与PLC通讯,因为这个问题浪费了半天的时间,最后没办法换了其他组员的电脑才解决了这个问题。
在回来的时候我把程序敲好,周末看见有人在实验室调试,在干活的同时也偷偷跑进去看了下他们的进展,讨论下程序的问题。
终于让我解决了点动和连动的切换,程序已经初见模型,接下来就是触摸屏了,小组同学承担了这部分的重要责任,让我轻松了不少。
这次实训我作为组长,没有尽到组长的责任,没有安排好组员,大家都有自己的事儿,工作的工作,重修考试的考试,回家的回家,经常一个人孤军奋战。
对于这次实训的安排我个人觉得不合理,做什么东西有实物才有操作感,程序不是想出来的,是调出来的。
当然这不能成为借口,学校给的条件,已经比很多学校好了,我们应该珍惜。
我一直都很珍惜大学的时光,我想它的每一次心跳都值得回忆。
八、参考资料
【1】工业机器人实训指导书
【2】《工业机器人项目综合训练》装置说明
【3】controllermaintenance有接线说明
【4】FX3U-16CCL-MUSER'
SMANUAL


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机器人 报告
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《城市规划基本知识》深刻复习要点.docx
《城市规划基本知识》深刻复习要点.docx
-
《高电压技术》word版.docx
-
《安全带》gb6095.docx
-
BCP计划应急计划.docx
-
《计算机组成与工作原理》第一章复习题.docx
-
CANON LBP系列激光打印机使用方法指南.docx
-
C语言课程设计火车票系统源代码.docx
-
3热力管道沟槽开挖方法.docx
-
HR岗位职责.docx
-
1 脱硫脱硝cems维护技术规范.docx
-
O2O超市商业项目计划书.docx
-
SCI期刊呼吸胸外.docx
-
18岁生日祝福语短信.docx
-
ITMC物流企业经营沙盘比赛规则.docx
-
XX钢绳成本管理.docx
-
Matlab的第三方工具箱大全强烈推荐.docx
-
安全保卫工作先进个人.docx
-
安全生产工作日记.docx
-
windows 漏洞集合.docx
-
Φ160数控落地镗铣床技术规格.docx
-
安全施工组织设计.docx
-
安全检查和隐患排查治理制度及记录.docx
-
部编版小学二年级语文下册课外阅读专项.docx
-
变电站投运前质量监督检查汇报材料模版.docx
-
版 创新设计 高考总复习 历史 北师大版第一部分 必考内容第十五单元 第38讲.docx
-
本科毕业设计论文.docx
-
北京大学社会心理学串讲笔记1一10章加试题.docx
-
亳州市教坛新星骨干教师学科带头人特级教师年度考核细则知识分享.docx
-
超星尔雅《人生与人心》期末考试满分答案.docx
-
财经法规与会计职业道德案例分析题.docx
-
茶文化会发言稿.docx
-
财务会计核算实习总结.docx
-
某框架结构综合大楼施工组织设计word模板可修改.docx
-
试题第一章 管理学概述.docx
-
转弯处的回头500字作文.docx
-
部编版三年级语文下册教案+反思 19 剃头大师.docx
-
届北京高考化学全真模拟试题一.docx
-
毛石挡土墙施工方案.docx
-
屠宰污水处理设计方案.docx
-
安徽省内河船员培训学习手册基本安全知识剖析word版本.docx
-
科研个人工作总结文档5篇.docx
-
桩基础施工的毕业论文docx.docx
-
南通市届高三第三次调研测试.docx
-
心理健康与心理调适考试题含答案.docx
-
初中物理八年级下册期末试题附答案.docx
-
中国农业银行笔试题目及答案.docx
-
商户装修标准.docx
-
广告心理策略1.docx
-
新人教版版八年级上学期期末考试物理试题D卷.docx
-
带有春江风人月花雨字的诗句.docx
-
最新仁爱英语九年级上Unit1Topic3测试题.docx
