 PLC机械手毕业设计Word格式.docx
PLC机械手毕业设计Word格式.docx
- 文档编号:22393715
- 上传时间:2023-02-03
- 格式:DOCX
- 页数:9
- 大小:107.69KB
PLC机械手毕业设计Word格式.docx
《PLC机械手毕业设计Word格式.docx》由会员分享,可在线阅读,更多相关《PLC机械手毕业设计Word格式.docx(9页珍藏版)》请在冰豆网上搜索。
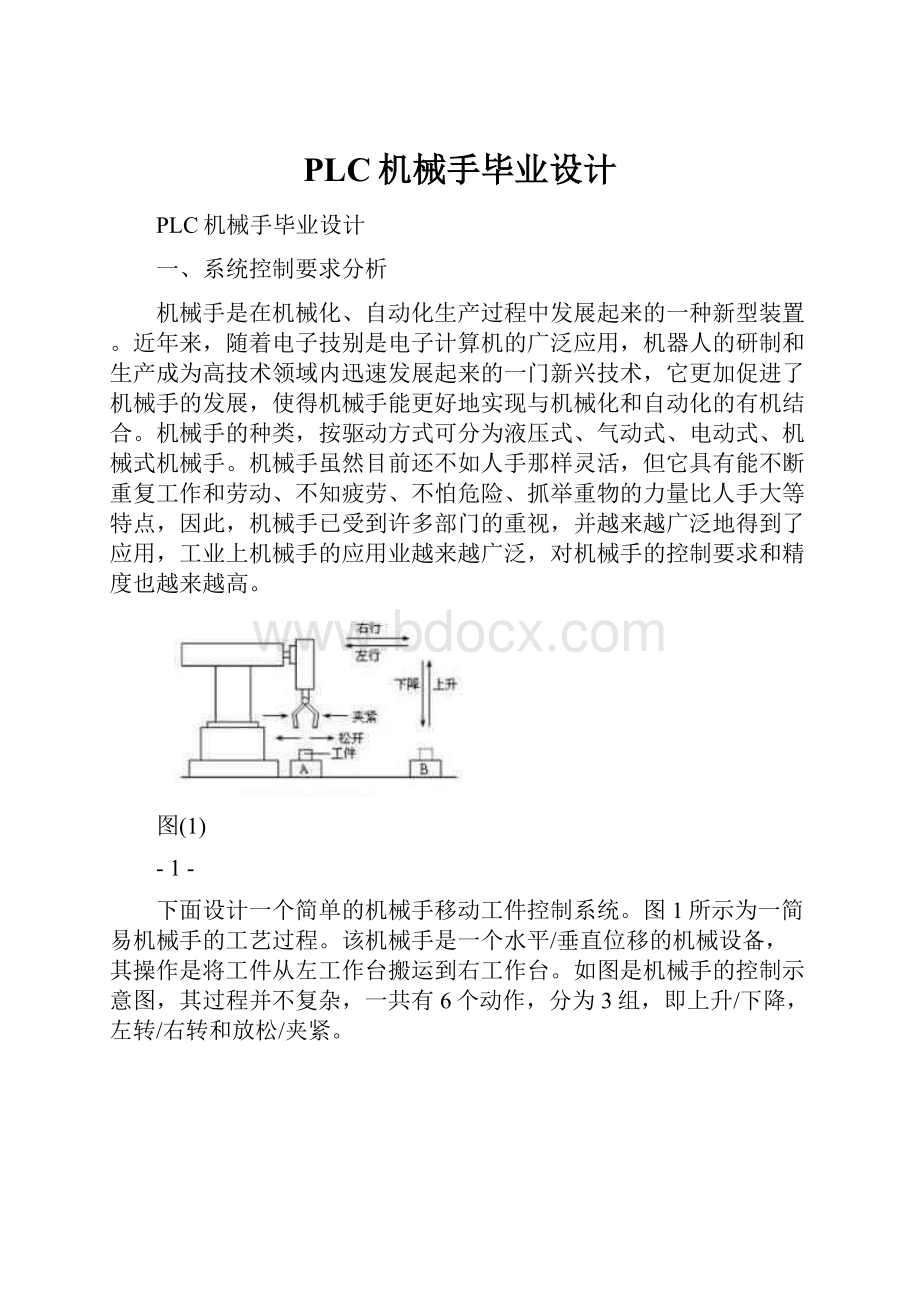
图1所示为一简易机械手的工艺过程。
该机械手是一个水平/垂直位移的机械设备,其操作是将工件从左工作台搬运到右工作台。
如图是机械手的控制示意图,其过程并不复杂,一共有6个动作,分为3组,即上升/下降,左转/右转和放松/夹紧。
-2-
图1机械手控制示意图
机械手的全部动作由汽缸驱动,而汽缸又由相应的电磁阀控制。
其中,上升/下降和左移/右移分别由双线圈的两位电磁阀控制。
例如,当下降电磁阀通电时,机械手下降,当下降电磁阀断电时,机械手下降停止。
只有当上升电磁阀通电时,机械手才上升,当上升电磁阀断电时,机械手停止上升。
同样,左移/右移分别由左移电磁阀和右移电磁阀控制。
机械手的放松/夹紧动作由一个单线圈的两位电磁阀控制。
当该线圈通电时,机械手夹紧;
当该线圈断电时,机械手放松。
当机械手右移到位并准备下降时,为了确保安全,必须在右工作台上无工件时才允许机械手下降。
也就是说,若上一搬运到右工作台上的工件尚未搬走,机械手应自动停止下降,用光电开关进行有无工件的检测。
-3-
二、各种电器元件
工程元器件清单
序号名称数量
1PLC1
21熔断器
31机械手
43气缸
52双线圈两位电磁阀
61单线圈两位电磁阀
72按键开关
85继电器
93指示灯
104限位开关
112光电开关
121定时器
-4-
三、PLC的选型
由于机械手系统的输入/输出接点少,要求电气控制部分体积小,成本低,并能够用计算机对PLC进行监控和管理,故选用日本OMRON(欧姆龙)公司生产的多功能小型C40P主机。
该
。
内部主要有:
136个辅助继电器、机输入点为24,输出点为16
6个特殊功能继电器、160个保持继电器、8个暂存继电器、48个定时/计数器、64个16位数据存贮器。
机箱的下部端子为输入端,左下边的端子0000、/0001、COM为高速计数输入端,端子0002~0015为汇点式普通输入端子。
机箱的上部端子为输出端子及电源等。
输出端0500~0503为隔离式输出端子。
输出端0504~0511为汇点式输出端子,有一个公共端子COM。
-5-
四、程序设置
1.I/O分配表
-6-
2.I/O接线图
-7-
3.单周自动工作梯形图
-8-
-9-
4.单周期指令语句表
地址指令数据地址指令数据0000LD00020035ORLD0001AND00040036LD10080002ANDNOT10010037AND00040003ANDNOT10020038ORLD0004ANDNOT10030039LD10090005ANDNOT10040040AND00040006ANDNOT10050041SFT100007ANDNOT100610
0008ANDNOT10070042LD10000009ANDNOT10080043OUT05050010ANDNOT10090044LD10010011UOT10000045OR10050012LD00050046OUT05000013LD10000047LD10020014AND00000048LD10060015LD10010049KEEP05010016AND00010050LD10020017ORLD0051TIM00
0018LD1002#0300
0019ANDTIM000052LD20000020ORLD0053OR05010021LD10030054OUT05020022AND00020055LD10040023ORLD0056OUT05030024LD10040057LD10060025AND00030058TIM010026ORLD#0250
0027LD10050059LD10080028AND00010060OUT05040029ORLD0061END(01)0030LD1006
0031ANDTIM01
0032ORLD
0033LD1007
0034AND0002
-10-
5.手动工作操作梯形图
-11-
6.手动操作指令语句表
地址指令数据地址指令数据0000LD00020015LD00090001AND00040016OR00130002OUT05050017OR05020003LD00070018ANDNOT00020004AND05050019OUT05020005LD00110020LD00100006AND00060021OR05030007ORLD0022ANDNOT00030008OR05000023OUT05030009ANDNOT00010024LD00140010OUT05000025OR05040011LD00080026ANDNOT00040012OR05010027OUT05040013ANDNOT00120028END(01)0014OUT0501
-12-
五、设计总结
本设计主要应用于机加工生产,货物调运等场合。
搬运机械手采用PLC控制,体积小,重量轻,控制方式灵活,可靠性高,操作简单,维修容易。
使用该机械手代替人工搬运工件,既安全,又准确,提高了劳动生产率,保证了工件的质量,降低了工人的劳动强度,具有较好的经济效益和社会效益。
可编程控制器PLC以其丰富的I/O接口模块、高可靠性,可以在机械手的控制系统的设计中起到了十分重要的作用。
本文就设计过程中的几项关键的问题提出了自己的一些看法,可以有效地提高系统的抗干扰能力,对PLC读、写,事件响应等通信时间可进行精确的控制,取得了良好的效果.
因为理论知识学的不牢固,在设计遇到了不少问题,如:
遗忘以前学过的专业基础知识。
通过理论与实际的结合,进一步提高观察、分析和解决问题的实际工作能力,以便培养成为能够主动适应社会主义现代化建设需要的高素质的复合型人才。
运用学习成果,把理论运用于实际,使理论得以提升,形成创新思想。
通过此次设计过程,巩固了专业基础知识,培养了我综合应用机械设计课程及其他课程的理论知识和应用生产实际知识解决工程实际问题的能力,在设计的过程中还培养出了我们的团队精神,为今后的学习和工作过程打下基础。
六、参考文献
1、杨思国、江力.可编程控制器应用教程.合肥工业大学出版,20082扬长能,林小峰编,可编程控制器(PC)例题习题及试验指导,
-13-
重庆:
重庆大学出版社
3邓则名,邝穗芳编,可编程控制器及应用技术。
北京:
机械工业出版社
4万太福,唐贤永编,可编程控制器及其应用。
5廖常初编著。
可编程序控制器应用技术。
重庆大学出版社,2000
6袁任光编著。
可编程序控制器(PC)应用技术与实例。
广州:
华南理工大学出版社,2000
7田瑞庭主编。
机械工业出版社,19943、张云波.工厂电气控制技术.高等教育出版社.20048、张建民.机电一体化设计.北京理工大学出版社.19969、程周.可编程控制器技术与应用.北京电子工业出版社.200210、郁汉琪、郭健.可编程序控制器原理及应用.中国电力出版社.200
-14-
-15-


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- PLC 机械手 毕业设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《城市规划基本知识》深刻复习要点.docx
《城市规划基本知识》深刻复习要点.docx
-
《高电压技术》word版.docx
-
《安全带》gb6095.docx
-
BCP计划应急计划.docx
-
《计算机组成与工作原理》第一章复习题.docx
-
CANON LBP系列激光打印机使用方法指南.docx
-
C语言课程设计火车票系统源代码.docx
-
3热力管道沟槽开挖方法.docx
-
HR岗位职责.docx
-
1 脱硫脱硝cems维护技术规范.docx
-
O2O超市商业项目计划书.docx
-
SCI期刊呼吸胸外.docx
-
18岁生日祝福语短信.docx
-
ITMC物流企业经营沙盘比赛规则.docx
-
XX钢绳成本管理.docx
-
Matlab的第三方工具箱大全强烈推荐.docx
-
安全保卫工作先进个人.docx
-
安全生产工作日记.docx
-
windows 漏洞集合.docx
-
Φ160数控落地镗铣床技术规格.docx
-
安全施工组织设计.docx
-
安全检查和隐患排查治理制度及记录.docx
-
部编版小学二年级语文下册课外阅读专项.docx
-
变电站投运前质量监督检查汇报材料模版.docx
-
版 创新设计 高考总复习 历史 北师大版第一部分 必考内容第十五单元 第38讲.docx
-
本科毕业设计论文.docx
-
北京大学社会心理学串讲笔记1一10章加试题.docx
-
亳州市教坛新星骨干教师学科带头人特级教师年度考核细则知识分享.docx
-
超星尔雅《人生与人心》期末考试满分答案.docx
-
财经法规与会计职业道德案例分析题.docx
-
茶文化会发言稿.docx
-
财务会计核算实习总结.docx
-
新课标I 理综.docx
-
优质行业分析报告解决方案最新大学生创业计划书 大学生微信创业挑战项目计划书.docx
-
有关学校开放日校长讲话稿范本.docx
-
幼儿园大班秋季学期班级计划.docx
-
幼儿园元旦亲子活动方案.docx
-
雨中登泰山.docx
-
语文人教三年级上册三 年 级 趣 味 作 文 教 学 设 计.docx
-
园林植物景观设计试题库.docx
-
月最低工资标准.docx
-
运城出租车从业资格证试题.docx
-
在全县信用社信贷营销动员大会上的讲话演讲致辞模板.docx
-
张爱玲亲情经典语录.docx
-
找最大公因数和最小公倍数练习题 128.docx
-
浙江省名校协作体届高三上学期联考 化学试题含详细答案.docx
-
珍爱生命注意安全演讲稿精选10篇.docx
-
整理多辊轧机冷轧技术概述.docx
-
正循环的技术交底.docx
-
知识学习学习雷锋纪念日动员大会讲话稿.docx
-
职业健康类知识竞赛题库含参考答案165题含参考答案.docx
