 姿态的欧拉角表示文档格式.docx
姿态的欧拉角表示文档格式.docx
- 文档编号:22297159
- 上传时间:2023-02-03
- 格式:DOCX
- 页数:8
- 大小:572.26KB
姿态的欧拉角表示文档格式.docx
《姿态的欧拉角表示文档格式.docx》由会员分享,可在线阅读,更多相关《姿态的欧拉角表示文档格式.docx(8页珍藏版)》请在冰豆网上搜索。
六种非对称型欧拉角:
XYZ,XZY,YXZ,YZX,ZXY和ZYX;
六种对称型欧拉角:
XYX,XZX,YXY,YZY,ZXZ和ZYZ。
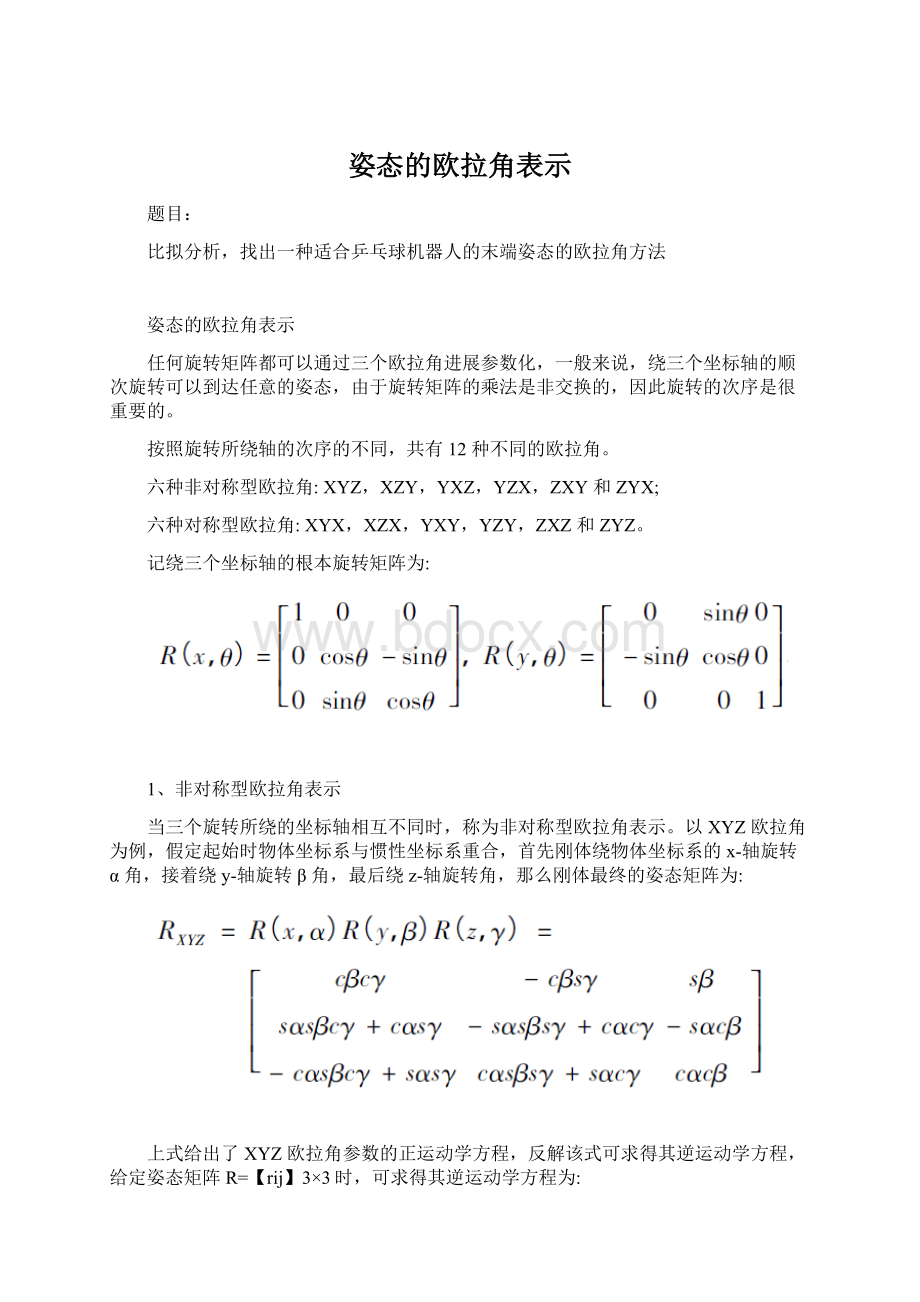
记绕三个坐标轴的根本旋转矩阵为:
1、非对称型欧拉角表示
当三个旋转所绕的坐标轴相互不同时,称为非对称型欧拉角表示。
以XYZ欧拉角为例,假定起始时物体坐标系与惯性坐标系重合,首先刚体绕物体坐标系的x-轴旋转α角,接着绕y-轴旋转β角,最后绕z-轴旋转角,那么刚体最终的姿态矩阵为:
上式给出了XYZ欧拉角参数的正运动学方程,反解该式可求得其逆运动学方程,给定姿态矩阵R=【rij】3×
3时,可求得其逆运动学方程为:
从上式可以看出,当β=π2时,逆运动学存在奇异。
其他五种非对称型欧拉角表示的姿态矩阵计算结果列于表1。
这些表示均在β=π2时存在奇异。
对称型欧拉角表示
当三个旋转所绕的坐标轴第一个和第三个一样时,称为对称型欧拉角表示,以ZYZ欧拉角为例,首先绕物体坐标系的z-轴旋转α角,接着绕y-轴旋转β角,最后绕x-轴旋转γ角,那么刚体最终的姿态矩阵为:
另外还有五种对称型欧拉角表示的姿态矩阵列于表2。
这些表示均在β=0时存在奇异。
欧拉角表示与RPY角表示的对偶性
姿态的三参数描述还有一种称为RPY角参数的方法。
1和2中所描述的欧拉角参数的运动过程都是在物体坐标系中进展的,因此其姿态矩阵是按照矩阵的右乘规那么得到的。
而RPY角参数的运动过程那么是在惯性坐标系中完成的,其姿态矩阵是按照矩阵的左乘规那么得到。
这样,与12种欧拉角参数相对应的就有12种RPY角参数。
以ZYXRPY
角参数为例,其运动过程是:
假定起始时物体坐标系与惯性坐标系重合,刚体首先绕惯性坐标系的z-轴旋转γ角,接着绕惯性坐标系的轴旋转角,最后绕惯性坐标系的轴旋转角。
最终刚体的姿态矩阵
为:
R'
ZYX=R(x,α)R(y,β)R(z,γ)=RXYZ。
因此,ZYXRPY角参数与XYZ欧拉角参数具有对偶关系。
同样的方法可以求得其他的11种欧拉角参数与相应的11种RPY角参数之间的对偶关系。
欧拉角参数表示的一阶运动
旋转矩阵R满足正交矩阵的条件,即RRT=1,对这个式子两边求导数,可得R·
RT+(R·
RT)T,因此
是一个反对称矩阵。
我们定义^ω=R·
RT为刚体的瞬时空间角速度矩阵,它是在惯性坐标系中描述的。
下面我们利用公式求刚体的瞬时空间角速度和欧拉角参数空间角速度之间的关系。
设R=ABC,其中A、B和C是三种根本旋转矩阵。
计算R=ABC的角速度矩阵,有:
写成向量形式有:
此处
称为XYZ型欧拉角参数表示的雅克比矩阵,由detJXYZ=cosβ可知,JXYZ在β=π/2时出现奇异,这就是XYZ型欧拉角参
数的一阶运动奇异位形。
其他欧拉角参数表示的雅可比矩阵列于表3和表4。
从表3可以看出,非对称型欧拉角表示的雅可
比矩阵都在β=π/2时出现奇异,因此它们存在大角度的一阶运动奇异;
从表4可以看出,对称型欧拉角表示的雅可比矩阵都在β=0时出现奇异,因此它们存在小角度的一阶运动奇异。
欧拉角参数表示的二阶运动
对式(4)继续求导,可以得到刚体的瞬时空间角加速度,它也是在惯性坐标系中描述的。
计算的结果如下,
其他欧拉角参数表示的矩阵列于表5和表6。
从表5可以看出,非对称欧拉角表示在β=π/2时出现二阶运动奇异,因此在这些点上存在大角度的二阶运动奇异;
从表6可以看出,对称欧拉角表示都在β=0时出现二阶运动奇异,因此在这些点上存在小角度二阶运动奇异。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 姿态 欧拉角 表示
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
青岛版四年级上册科学实验操作精品资料doc.docx
-
keil错误总结.docx
-
卢志祥基于单片机的智能火灾报警系统.docx
-
孕妇十月怀胎每月营养搭配食谱与饮食宜忌.docx
-
论文前半部分.docx
-
情感语录爱情语录.docx
-
室内装修材料价格清单.docx
-
市工商局农村经纪人年终工作总结多篇范文与市工商局副局长述职述廉报告汇编.docx
-
教师进修学校小学教研室的工作总结.docx
-
论文柏拉图《理想国》的教育思想评述.docx
-
植物激素案例.docx
-
旅游企业安全生产责任制安全生产.docx
-
人教pep版三年级英语上册unit6单元教案1精品.docx
-
安全文明施工整改措施.docx
-
我国平安人寿保险服务管理办法.docx
-
输煤规程1.docx
-
人教版二年级数学下册19单元试题含期中及4套期末.docx
-
爸爸的爱作文合集15篇.docx
-
人教版高中英语必修二Unit 3Computers.docx
 党支部书记抓基层党建工作述职报告.docx
党支部书记抓基层党建工作述职报告.docx
- 最新西师版数学四年级下册教案Word文档下载推荐.docx
- 尊敬的各位老师大家下午好今天我就小学英语中的语音Word文件下载.docx
- 最新经济法基础模拟试题与答案文档格式.docx
- 最新高一数学上学期期中检测必修1+数学试题3优秀名师资料Word格式文档下载.docx
- 装配式结构住宅楼脚手架搭设方案Word格式文档下载.docx
- 最新人教部编版小学语文四年级上册21古诗三首说课稿Word格式文档下载.docx
- 重庆市中考英语真题试题A卷含答案新文档格式.docx
- 专题71 力考点题型解密解析版Word文档格式.docx
- 总务护士工作总结范文五篇Word格式.docx