 ab增强型PID功能块1docWord格式文档下载.docx
ab增强型PID功能块1docWord格式文档下载.docx
- 文档编号:22238820
- 上传时间:2023-02-03
- 格式:DOCX
- 页数:15
- 大小:87.99KB
ab增强型PID功能块1docWord格式文档下载.docx
《ab增强型PID功能块1docWord格式文档下载.docx》由会员分享,可在线阅读,更多相关《ab增强型PID功能块1docWord格式文档下载.docx(15页珍藏版)》请在冰豆网上搜索。
XX0
XXX0XXX0XXX0X请求“程序”模式X1X1XX1
表3–操作员/程序模式选择.
表3显示了使PIDE功能块处于操作员模式或程序模式而所需的不同输入的逻辑状态。
操作员模式面板
RSLogix5000安装CD上包括很多面板,它们可以和不同的功能块一起使用。
一种面板专为PIDE功能块而提供。
这个面板可以很容易地使用PIDE和HMI控制软件包(例如RSView)。
《ProcessControlandDrivesInstructionManual(过程控制和驱动指令手册)》(出版号:
1756-RM006A-EN-P)的第C-17到C-19页对这个面板进行了说明。
运行模式
串级/比率指令计算CV的变化。
指令会调节CV的数值,以使PV保持在SPCascade的数值等级(串级控制)或者保持在SPCascade乘以比率的数值等级。
自动指令计算CV的变化。
指令会调节CV的数值,以使PV保持在SP的数值等级。
手动指令不计算CV的变化。
CV=CVProg或CVOper取决于操作条件。
覆盖在这个模式下,指令不计算SP的变化。
这个模式通常用于设置回路的“安全状态CV数值”。
无论控制模式如何,CV=CVOverride。
手操指令不计算CV的变化。
无论控制模式如何,CV=HandFB。
通常当外部手操/自动工作站控制回路时,使用这个模式。
表4.运行模式
当处于程序控制状态时,串级/比率、自动和手动模式可以由用户的程序进行控制,当处于操作员控制状态时,串级/比率、自动和手动模式可以由操作员面板或
3
其它接口进行控制。
注意:
覆盖和手操模式具有模式请求布尔量输入,它们只能由用户的程序进行控制。
这些输入可以运行在程序控制和操作员控制状态。
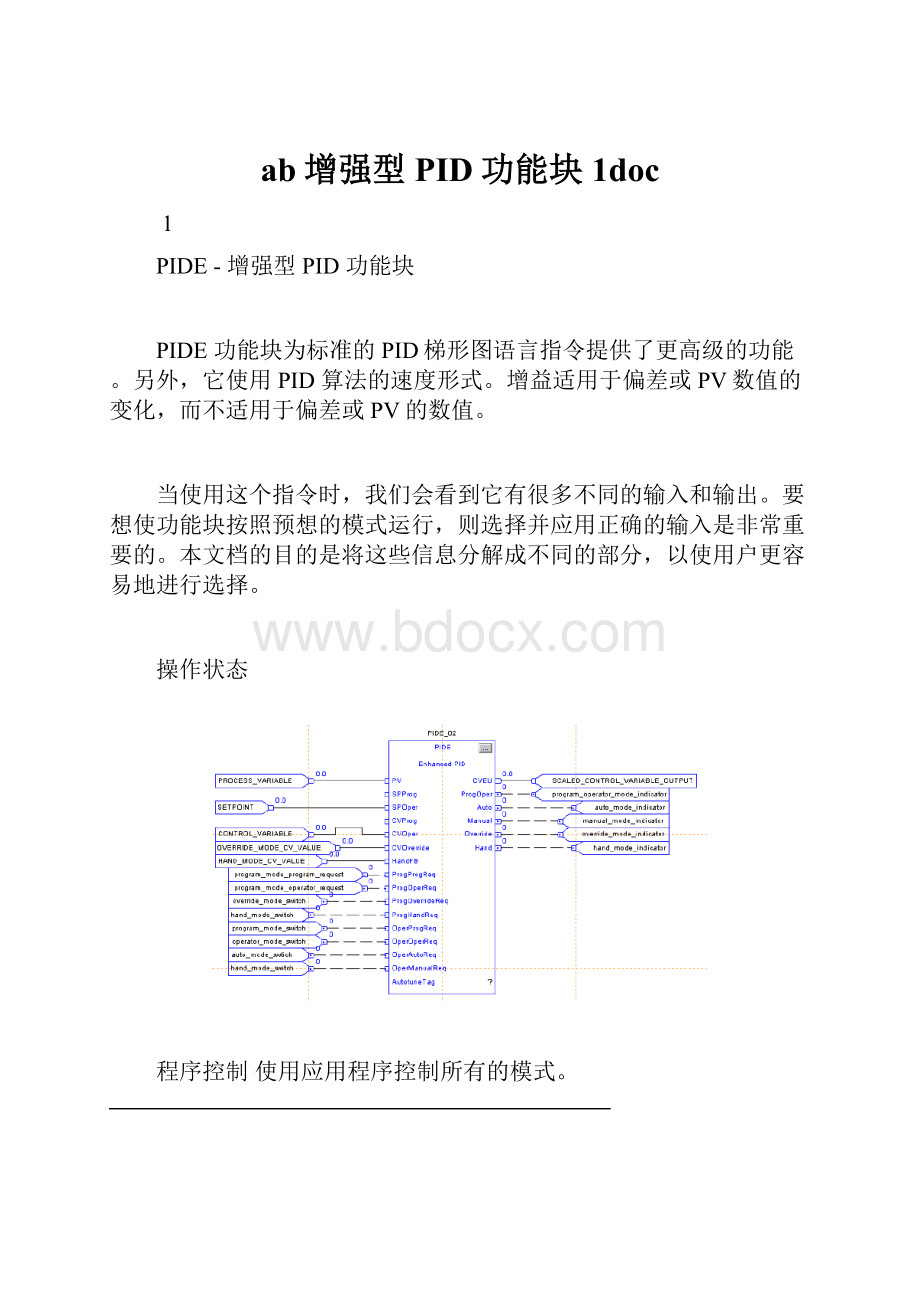
从功能块的图标上我们可以看到:
输入显示在功能块的左手侧,输出显示在功能块的右手侧。
布尔量输入用于控制PIDE功能块的状态,布尔量输出用于状态或反馈指示器。
编程人员可以使用功能块图标上的设置箱来选择在程序中需要显示的输入和输出。
鉴于此目的,模拟量变量以全部大写字母显示,布尔变量以小写字母显示并且在连接盒的内部有一个圆点。
不同的图例和图7显示了布尔量输入,它们的标签名以“Prog”开头,还有一系列当功能块处于操作员状态时使用的复制输入,它们的标签名以“Oper”开头。
这些输入的名字前面显示一个星号。
图5.带自动、手动、手操和覆盖控制功能的PIDE用于程序控制状态输入和输出
图6.串级和比率控制的额外输入和输出.
4
图例和表7显示了布尔量输入,它们的标签名以“Prog”开头,还有一系列当功能块处于操作员状态时使用的复制输入,它们的标签名以“Oper”开头。
表7显示了如何由不同的输入组合实现PIDE功能块的不同控制模式。
状态指示器的状态在右边的列中显示。
Prog
HandReq
*ProgManualReg
*ProgAutoReq
ProgOverrideReq
*ProgCasRatReq
AllowCasRat
UseRatio
自动
手动
覆盖
手操
串级
使能“手操”模式XX
使能“覆盖”模式XX
使能“手动”模式XX
使能“自动”模式XX
从“自动”到“手动”XXX
从“手动”到“自动”XX
使能“串级”模式XXX使能“比率”模式XXXX返回到“自动”模式XX
从“手动”到“手操”XXX
从“自动”到“手操”XXX
从“覆盖”模式到“手操”XXX
“覆盖”模式XXX
“手操”模式XXXX
表7.控制模式选择和反馈指示器.
状态字1和2
PIDE控制结构中包含了两个状态字。
它们的名称为“状态1”和“状态2”。
这些状态字都是DINT类型,并且如果正常运行应该具有零数值。
这些状态字的每一位都具有不同的意义,这为在指令设置时的故障处理提供了很大的帮助。
在PIDE控制结构中这些偏差数据以十六进制表示。
表8和9。
状态1提供了指令状态的信息。
当它的数值为零时,代表一切正常。
它使用位00到29。
每一位具有不同的意义,例如,如果位00等于1,指示已经检测到故障。
表8中显示了每个故障位的意义以及对不同数值产生反应的信息。
状态2提供了指令定时状态的信息。
它使用位27到31来指示有效的定时状态。
表
9提供了关于这个状态字每一位意义的信息。
状态字参数说明注
5
位地址
释
1.00InstructFault检测到指令故障。
1.01PVFaulted过程变量(PV)无效。
181.02CVFaulted
控制变量(CV)无效。
181.03HandFBFaultedHandFB数值无效。
191.04PVSpanInvPVEUMax<
=PVEUMin
1.05SPProgInvSPProg<
SPLLimit或SPProg>
SPHLimit11.06SPOperInvSPOper<
SPLLimit或SPOper>
SPHLimit
11.07SPCascadeInvSPCascade<
SPLLimit或SPCascade>
11.08SPLimitsInv
SPLLimit<
PVEUMin,SPHLimit>
PVEUMax或SPHLimit<
SPLLimit.
21.09RatioProgInvRatioProg<
RatioLLimit或RatioProg>
RatioHLimit31.10RatioOperInvRatioOper<
RatioLLimit或RatioOper>
RatioHLimit31.11RatioLimitsInvLowlimit<
0或Highlimit<
lowlimit.
1.12CVProgInv当CVManLimiting被置位时,CVProg<
0或CVProg>
100或CVProg<
CVLLimit或CVProg>
CVHLimit.
41.13CVOperInv当CVManLimiting被置位时,CVOper<
0或CVOper>
100或
CVOper<
CVLLimit或CVOper>
41.14CVOverrideInvCVOverride<
0或CVOverride>
100.41.15CVPreviousInv当处于自动或串级/比率模式时,CVPrevious<
0或CVPrevious>
100或>
51.16CVEUSpanInv无效的CVEU范围.61.17CVLimitsInvCVLLimit<
0,CVHLimit>
100或CVHLimit<
CVLLimit.71.18CVROCLimitInvCVROCLimit<
0.81.19FFInvFF<
-100或FF>
100.91.20FFPreviousInvFFPrevious<
-100或FFPrevious>
100.101.21HandFBInvHandFB<
0或HandFB>
100.111.22PgainInvPgain<
0.121.23IGainInvIgain<
0.131.24DGainInvDgain<
0.
141.25ZCDeadbandInvZCDeadband<
0151.26PVDeadbandInvPVDeadband<
0
1.27PVROCLimitsInvPVROCPostLimit<
0,PVROCNegLimit<
0或PVROCPeriod<
0.
1.28DevLLimitsInvLowlowlimit<
0,Lowlimit<
0,Highlimit<
0或Highhigh
limit<
161.29
DevDeadbandInv偏差死区<
17
表8.状态1–指令故障
很多故障是由PIDE所使用的不同变量的极限值设置而引起的。
确保何时使用极限值以及如何正确地设置它们是非常重要的。
注释:
1.指令为SP使用极限值。
2.指令使用SPLLimit限制数值。
3.指令为比率使用极限值。
4.指令为CV使用极限值。
5.指令为CVn-1使用极限值。
6.指令使用CVEUMax=CVEUMin时的数值。
7.如果CVHLimit<
CVLLimit,那么指令会使用CVLLimit限制CV的数值。
8.指令会禁止ROC极限。
9.指令为FF使用限制值。
6
10.指令为FFn-1使用限制值。
11.指令为CV使用极限值。
12.指令使用Pgain=0时的数值。
13.指令使用Igain=0时的数值。
14.指令使用Dgain=0时的数值。
15.指令会禁止零交叉死区。
16.指令为无效的极限值使用0值。
17.指令使用DevDeadband=0时的数值。
18.故障位由模拟量输入或输出模块的故障指示器进行置位。
19.故障位由模拟量输入模块(它从外部自动-手动工作站读取手操信号)的故障指示器进行置位。
状态字位地址参数说明
27TimingModeInv无效的TimingMode数值
28RTSMissed
只能用于实时采样模式。
当ABS[
DeltaT–RTSTime}>
1(.oo1秒)时置位.
29RTSTimeInv无效的RTSTime数值.
30RTSTimeStampInv无效的RTSTimeStamp数值
31
DeltaTInv无效的DeltaT数值
表9.状态2–定时状态错误
指示器
PIDE功能块有很多布尔量输出,它们可以用于状态或报警指示器。
通过在功能块中点选或清除相应的复选框,就可以为特定的指示器选择或取消选择某些输出。
有些指示器已经在这篇陈述中进行了回顾。
如果某些输出没有选择,它们将不在功能块的管脚中显示。
这些指示器以及它们的触发值在表10中进行说明。
描述
说明
CVInitializing
初始化模式指示器。
在指令第一次扫描的过程中,当CVInitReq被置位时,CVInitializing被置位,并且执行CVHealth的清除转换(由坏变好)。
在指令被初始化完成后并且CVInitReq被清除,CVInitializing才会被清除。
CVHAlarm
CV高报警指示器。
当CV的计算值>
100或CVHLimit时置位。
CVLAlarm
CV低报警指示器。
当CV的计算值<
0或CVLLimit时置位。
CVROCAlarm
CV变化速率报警指示器。
当CV的变化速率超过CVROCLimit时置位。
SPHAlarm
设定点高报警指示器。
当SP>
SPHLimit时置位。
SPLAlarm
设定点低报警指示器。
当SP<
WindupHOut
终止高指示器。
当SPhigh、CVhigh或CVlow极限(取决于控制动作)达到时置位。
这个信号通常由主回路控制器的WindupHIn输入所使用,以防止它的输出终止。
WindupLOut
终止低指示器。
这个信号通常由主回路控制器的WindupLIn输入所使用,以防止它的输出终止。
RatioHAlarm
比率高报警指示器。
当比率>
RatioHLimit时置位。
7
RatioLAlarm
比率低报警指示器。
当比率<
RatioLLimit时置位。
ZCDeadbandOn
零交叉死区指示器。
当置位时,CV的数值将不再变化。
如果ZCOff被置位,那么当偏差处于ZCDeadband范围之内时,ZCDeadbandOn会置位。
如果ZCOff被清除,那么当偏差穿越零并且仍然处于ZCDeadband范围之内时,ZCDeadbandOn会置位。
当偏差超过死区范围或者当ZCDeadband=0时,ZCDeadbandOn会被清除。
PVHAlarmPV高报警指示器。
当PV=>
PVHLimit时置位。
当PV<
(PVHLimit–
PVDeadband)时清除。
PVLAlarmPV低报警指示器。
当PV=<
PVLLimit时置位。
当PV>
(PVLLimit+
PVROCPosAlarmPV正变化速率报警指示器。
当PV变化速率的计算值=>
PVROCPosLimit时置位。
PVROCNegAlarmPV负变化速率报警指示器。
当PV变化速率的计算值=<
(PVROCNegLimitx–1)时置位。
DevHHAlarm退出高-高报警指示器。
(SP+DevHHLimit)时置位。
(SP+DevHHLimit–DevDeadband时清除。
DevHAlarm退出高报警指示器。
(SP+DevHLimit)时置位。
(SP+DevHLimit
–DevDeadband时清除。
DevLAlarm退出低报警指示器。
(SP-DevLLimit)时置位。
(SP-DevHLimit
+DevDeadband)时清除。
DevLLAlarm退出低-低报警指示器。
(SP-DevLLLimit)时置位。
(SP-DevHLimit+DevDeadband)时清除。
表10–报警指示器


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- ab 增强 PID 功能块 doc
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《城市规划基本知识》深刻复习要点.docx
《城市规划基本知识》深刻复习要点.docx
-
《高电压技术》word版.docx
-
《安全带》gb6095.docx
-
BCP计划应急计划.docx
-
《计算机组成与工作原理》第一章复习题.docx
-
CANON LBP系列激光打印机使用方法指南.docx
-
C语言课程设计火车票系统源代码.docx
-
3热力管道沟槽开挖方法.docx
-
HR岗位职责.docx
-
1 脱硫脱硝cems维护技术规范.docx
-
O2O超市商业项目计划书.docx
-
SCI期刊呼吸胸外.docx
-
18岁生日祝福语短信.docx
-
ITMC物流企业经营沙盘比赛规则.docx
-
XX钢绳成本管理.docx
-
Matlab的第三方工具箱大全强烈推荐.docx
-
安全保卫工作先进个人.docx
-
安全生产工作日记.docx
-
windows 漏洞集合.docx
-
Φ160数控落地镗铣床技术规格.docx
-
安全施工组织设计.docx
-
安全检查和隐患排查治理制度及记录.docx
-
部编版小学二年级语文下册课外阅读专项.docx
-
变电站投运前质量监督检查汇报材料模版.docx
-
版 创新设计 高考总复习 历史 北师大版第一部分 必考内容第十五单元 第38讲.docx
-
本科毕业设计论文.docx
-
北京大学社会心理学串讲笔记1一10章加试题.docx
-
亳州市教坛新星骨干教师学科带头人特级教师年度考核细则知识分享.docx
-
超星尔雅《人生与人心》期末考试满分答案.docx
-
财经法规与会计职业道德案例分析题.docx
-
茶文化会发言稿.docx
-
财务会计核算实习总结.docx
-
即是要做到不断地学习广泛地涉猎各方面的知识在学习中提高自己工作的能力 11页文档格式.docx
-
三国志集解924928Word下载.docx
-
土地使用权转让合同样本二Word下载.docx
-
推荐下载jk罗琳演讲稿word版本 13页Word文档下载推荐.docx
-
高考病句练习Word格式.docx
-
八年下平行四边形综合训练文档格式.docx
-
物理人教版选修35教学案第16章 第4节 碰 撞 同步练习Word版含答案Word文件下载.docx
-
版英语高考专题辅导与训练精练精析SDZY专题强化测评二十完形填空阅读理解六Word格式.docx
-
很棒的英语学习方法Word格式文档下载.docx
-
完整版山东省济南市历下区质检数学试题及答案Word文档格式.docx
-
三相异步电动机的正转控制线路教案Word格式.docx
-
物资管理工作总结Word下载.docx
-
江苏省联盟大联考届高三联考数学试题含附加题含答案Word文档格式.docx
-
高考数学总复习 第二章 函数知能训练 理Word下载.docx
-
各部门安全生产责任制度Word下载.docx
-
现代名医传记之张学文Word格式.docx
-
块体表面裂纹应力强度因子有限元方法研究Word格式文档下载.docx
-
高三英语月考试题及答案拉萨中学届高三下学期月考Word文件下载.docx
-
完整版华南师范大学现代汉语题库整理Word格式.docx
