 机械原理课程设计凸轮设计Word格式文档下载.docx
机械原理课程设计凸轮设计Word格式文档下载.docx
- 文档编号:22026525
- 上传时间:2023-02-02
- 格式:DOCX
- 页数:17
- 大小:247.21KB
机械原理课程设计凸轮设计Word格式文档下载.docx
《机械原理课程设计凸轮设计Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《机械原理课程设计凸轮设计Word格式文档下载.docx(17页珍藏版)》请在冰豆网上搜索。
四、原始数据
凸轮机构设计
°
15
125
40
70
10
五、要求:
1)计算从动件位移、速度、加速度并绘制线图。
2)确定凸轮机构的基本尺寸,选取滚子半径,画出凸轮实际廓线,并按比例绘出机构运动简图。
以上内容作在A2或A3图纸上。
3)编写出计算说明书。
开始日期:
2010年07月10日完成日期:
2010年07月16日
一设计任务及要求-----------------------------------------------2
二数学模型的建立-----------------------------------------------2
三程序框图--------------------------------------------------------5
四程序清单及运行结果-----------------------------------------6
五设计总结-------------------------------------------------------14
六参考文献-----------------------------------------------------15
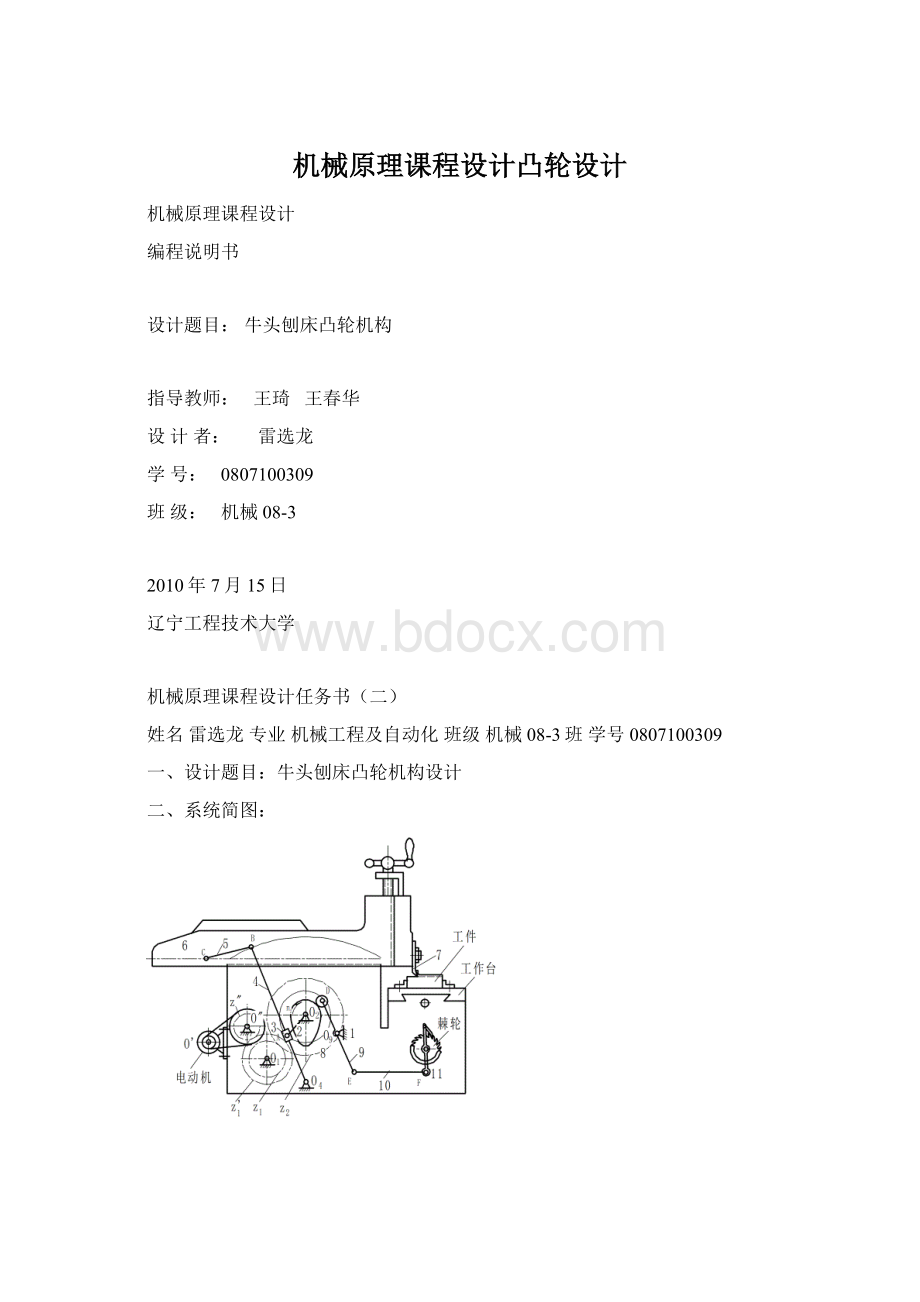
一设计任务与要求
已知摆杆9为等加速等减速运动规律,其推程运动角φ=70,远休止角φs=10,回程运动角φ΄=70,摆杆长度l09D=125,最大摆角φmax=15,许用压力角[α]=40,凸轮与曲线共轴。
(1)要求:
计算从动件位移、速度、加速度并绘制线图(用方格纸绘制),也可做动态显示。
(2)确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线,并按比例绘出机构运动简图。
(3)编写计算说明书。
二机构的数学模型
1推程等加速区
当
时
角位移
角速度
角加速度
2推程等减速区
角速度
3远休止区
4回程等加速区
5回程等减速区
角速度
角加速度
6近休止区
如图选取xOy坐标系,B1点为凸轮轮廓线起始点。
开始时推杆轮子中心处于B1点处,当凸轮转过角度时,摆动推杆角位移为,由反转法作图可看出,此时滚子中心应处于B点,其直角坐标为:
因为实际轮廓线与理论轮廓线为等距离,即法向距离处处相等,都为滚半径
rT.故将理论廓线上的点沿其法向向内测移动距离rr即得实际廓线上的点B(x1,y1).由高等数学知,理论廓线B点处法线nn的斜率应为
根据上式有:
可得
实际轮廓线上对应的点B(x,y)的坐标为
此即为凸轮工作的实际廓线方程,式中“-”用于内等距线,“+”用于外等距线。
三程序框图
四程序清单及运行结果
#include<
math.h>
dos.h>
graphics.h>
conio.h>
stdio.h>
#definel125.0
#defineAa40
#definer_b50
#definerr7.5
#defineK(3.1415926/180)
#definedt0.25
floatQ_max,Q_t,Q_s,Q_h;
floatQ_a;
doubleL,pr;
floate[1500],f[1500],g[1500];
voidCal(floatQ,doubleQ_Q[3])
{
Q_max=15,Q_t=70,Q_s=10,Q_h=70;
if(Q>
=0&
&
Q<
=Q_t/2)
Q_Q[0]=K*(2*Q_max*Q*Q/(Q_t*Q_t));
Q_Q[1]=4*Q_max*Q/(Q_t*Q_t);
Q_Q[2]=4*Q_max/(Q_t*Q_t);
}
Q_t/2&
=Q_t)
Q_Q[0]=K*(Q_max-2*Q_max*(Q-Q_t)*(Q-Q_t)/(Q_t*Q_t));
Q_Q[1]=4*Q_max*(Q_t-Q)/(Q_t*Q_t);
Q_Q[2]=-4*Q_max/(Q_t*Q_t);
Q_t&
=Q_t+Q_s)
Q_Q[0]=K*Q_max;
Q_Q[1]=0;
Q_Q[2]=0;
Q_t+Q_s&
=Q_t+Q_s+Q_h/2)
Q_Q[0]=K*(Q_max-2*Q_max*(Q-Q_t-Q_s)*(Q-Q_t-Q_s)/(Q_h*Q_h));
Q_Q[1]=-4*Q_max*(Q-Q_t-Q_s)/(Q_h*Q_h);
Q_Q[2]=-4*Q_max/(Q_h*Q_h);
Q_t+Q_s+Q_h/2&
=Q_t+Q_s+Q_h)
Q_Q[0]=K*(2*Q_max*(Q_h-Q+Q_t+Q_s)*(Q_h-Q+Q_t+Q_s)/(Q_h*Q_h));
Q_Q[1]=-4*Q_max*(Q_h-Q+Q_t+Q_s)/(Q_h*Q_h);
Q_Q[2]=4*Q_max/(Q_h*Q_h);
Q_t+Q_s+Q_h&
=360)
Q_Q[0]=K*0;
voidDraw(floatQ_m)
{
floattt,x,y,x1,y1,x2,y2,x3,y3,x4,y4,dx,dy;
doubleQQ[3];
circle(240,240,3);
circle(240+L*sin(50*K)+4*cos(240*K),240+L*cos(50*K)-4*sin(240*K),3);
moveto(240,240);
lineto(240+20*cos(240*K),240-20*sin(240*K));
lineto(260+20*cos(240*K),240-20*sin(240*K));
lineto(240,240);
moveto(240+L*sin(50*K)+4*cos(240*K),240+L*cos(50*K)-4*sin(240*K));
lineto(240+L*sin(50*K)+20*cos(240*K),240+L*cos(50*K)-20*sin(240*K));
lineto(255+L*sin(50*K)+20*cos(240*K),240+L*cos(50*K)-20*sin(240*K));
lineto(240+L*sin(50*K)+4*cos(240*K),240+L*cos(50*K)-4*sin(240*K));
for(tt=0;
tt<
=720;
tt=tt+2)
Cal(tt,QQ);
x1=L*cos(tt*K)-l*cos(Q_a+QQ[0]-tt*K);
y1=l*sin(Q_a+QQ[0]-tt*K)+L*sin(tt*K);
x2=x1*cos(Q_m*K+40*K)+y1*sin(Q_m*K+40*K);
y2=-x1*sin(Q_m*K+40*K)+y1*cos(Q_m*K+40*K);
putpixel(x2+240,240-y2,2);
dx=(QQ[1]-1)*l*sin(Q_a+QQ[0]-tt*K)-L*sin(tt*K);
dy=(QQ[1]-1)*l*cos(Q_a+QQ[0]-tt*K)+L*cos(tt*K);
x3=x1-rr*dy/sqrt(dx*dx+dy*dy);
y3=y1+rr*dx/sqrt(dx*dx+dy*dy);
x4=x3*cos(Q_m*K+40*K)+y3*sin(Q_m*K+40*K);
y4=-x3*sin(Q_m*K+40*K)+y3*cos(Q_m*K+40*K);
putpixel(x4+240,240-y4,YELLOW);
voidCurvel()
intt;
floaty1,y2,y3,a=0;
for(t=0;
t<
=360/dt;
t++)
delay(300);
a=t*dt;
if((a>
=0)&
(a<
=Q_t/2))
{
y1=(2*Q_max*pow(a,2)/pow(Q_t,2))*10;
y2=(4*Q_max*(dt*K)*a/pow(Q_t,2))*pow(10,4.8);
y3=(4*Q_max*pow((dt*K),2)/pow(Q_t,2))*pow(10,8.5);
putpixel(100+a,300-y1,1);
putpixel(100+a,300-y2,2);
putpixel(100+a,300-y3,4);
line(100+Q_t/2,300-y3,100+Q_t/2,300);
if((a>
Q_t/2)&
=Q_t))
y1=(Q_max-2*Q_max*pow((Q_t-a),2)/pow(Q_t,2))*10;
y2=(4*Q_max*(dt*K)*(Q_t-a)/pow(Q_t,2))*pow(10,4.8);
y3=((-4)*Q_max*pow((dt*K),2)/pow(Q_t,2))*pow(10,8.5);
putpixel(100+a,300-y1,1);
putpixel(100+a,300-y2,2);
putpixel(100+a,300-y3,4);
line(100+Q_t,300-y3,100+Q_t,300);
line(100+Q_t/2,300,100+Q_t/2,300-y3);
Q_t)&
=Q_t+Q_s))
y1=Q_max*10;
y2=0;
y3=0;
line((100+Q_t+Q_s),300,(100+Q_t+Q_s),300-y3);
Q_t+Q_s)&
=Q_t+Q_s+Q_h/2))
y1=(Q_max-2*Q_max*pow((a-Q_t-Q_s),2)/pow(Q_h,2))*10;
y2=((-4)*Q_max*(dt*K)*(a-Q_t-Q_s)/pow(Q_h,2))*pow(10,4.8);
y3=((-4)*Q_max*pow((dt*K),2)/pow(Q_h,2))*pow(10,8.5);
line((100+Q_t+Q_s+Q_h/2),300,(100+Q_t+Q_s+Q_h/2),300-y3);
Q_t+Q_s+Q_h/2)&
=Q_t+Q_s+Q_h))
y1=(2*Q_max*pow((Q_h-a+Q_t+Q_s),2)/pow(Q_h,2))*10;
y2=((-4)*Q_max*(dt*K)*(Q_h-a+Q_t+Q_s)/pow(Q_h,2))*pow(10,4.8);
y3=(4*Q_max*pow((dt*K),2)/pow(Q_h,2))*pow(10,8.5);
line((100+Q_t+Q_s+Q_h),300-y3,(100+Q_t+Q_s+Q_h),300);
Q_t+Q_s+Q_h)&
=360))
y1=0;
putpixel(100+a,300,1);
putpixel(100+a,300,2);
putpixel(100+a,300,4);
e[t]=y1;
f[t]=y2;
g[t]=y3;
main()
intgd=DETECT,gm;
inti,t,choice,x_1,y_1,flag=1;
doubleQQ1[3],aa;
FILE*f1;
if((f1=fopen("
liminghao.txt"
"
w"
))==NULL)
printf("
liminghao.txtcannotopen!
\n"
);
exit(0);
initgraph(&
gd,&
gm,"
"
cleardevice();
for(t=0;
!
kbhit();
for(;
t>
360;
)
t-=360;
if(flag==1)
for(L=l-r_b+70;
L<
l+r_b;
L+=2)
Q_a=acos((L*L+l*l-r_b*r_b)/(2.0*L*l));
Cal(t,QQ1);
aa=atan(l*(1-QQ1[1]-L*cos(Q_a-QQ1[0]))/(L*sin(Q_a+QQ1[0])));
/*压力角*/
pr=(pow((L*L+l*l*(1+QQ1[1])*(1+QQ1[1])-2.0*L*l*(1+QQ1[1]*cos(Q_a+QQ1[0]))),3.0/2))/*曲率半径*//((1+QQ1[1])*(2+QQ1[1])*L*l*cos(Q_a+QQ1[0])+QQ1[2]*L*l*sin(Q_a+QQ1[0])-L*L-l*l*pow((1+QQ1[1]),3));
if(aa<
=Aa&
pr>
rr)
flag=0;
break;
if(flag==0)
Cal(t,QQ1);
Draw(t);
cleardevice();
x_1=240+L*sin(50*K)-l*cos(Q_a+QQ1[0]+40*K);
y_1=240+L*cos(50*K)-l*sin(Q_a+QQ1[0]+40*K);
circle(x_1,y_1,rr);
line(240+L*sin(50*K),240+L*cos(50*K),x_1,y_1);
moveto(240+L*sin(50*K),240+L*cos(50*K));
lineto(240+L*sin(50*K)+l*cos(Q_a+QQ1[0]+40*K),480+2*L*cos(50*K)-y_1);
lineto(140+L+l*cos(Q_a+QQ1[0])*2,480+2*L*cos(50*K)-y_1);
delay
(1);
getch();
line(100,80,100,445);
line(70,300,530,300);
line(100,80,98,90);
line(100,80,102,90);
line(520,298,530,300);
line(520,302,530,300);
setcolor
(2);
outtextxy(300,150,"
Theanalysisofthewormgear'
smovement"
printf("
\n\n\n\n\nQ(w,a)"
\n\n\n\n\n\n\n\n\n\n\n\n\n\n\t\t\t\t\t\t\t\tt"
Curvel();
\n\n\n\n\n\n\n\n\n\n"
for(i=0;
i<
=1440;
i=i+20)
delay(1000);
%d%f%f%f\n"
i/4,e[i],f[i],g[i]);
fprintf(f1,"
fclose(f1);
closegraph();
角度10倍角位移104.8倍角速度108.5倍角加速度
235-3600.0000000.0000000.000000
五总结
机械原理课程设计是工科院校学生在大学期间利用已学过的知识和计算机工具第一次比较全面的,具有实际意义的课程设计,也是机械原理课程的一个重要的实践环节。
在设计之前,我按照老师的要求认真的阅读了机械原理课程设计这本教材,在设计开始的时候,我终于明白了提前预习的重要性。
这次设计运用到了很多以前学过的知识,在老师耐心帮助下完成了机构运动简图。
我又学会了TurboC/C++软件的运用,又巩固了CAXA的画图技巧,最重要的也是最难的C语言编程在同组的同学帮助下顺利的完成。
C语言中遇到很多情况,比如头文件的辨别,定义与定位的技巧等等,又巩固了知识,也学到了新知识。
在设计过程中培养了我的综合运用机械设计课程及其他课程理论知识和利用生产时间知识来解决实际问题的能力,真正做到了学以致用。
在此期间我我们同学之间互相帮助,共同面对机械设计课程设计当中遇到的困难,培养了我们的团队精神。
在设计中有很多人的精神值得学习,比如我的班长,人家的确有种耐得住寂寞的心态.确实他在学习上取得了很多傲人的成绩,但是我所赞赏的还是他追求的过程,当遇到问题的时候,那种斟酌的态度就值得我们每一位学习,人家是在用心造就自己的任务,而且孜孜不倦,追求卓越.
在这些过程当中我充分的认识到自己在知识理解和接受应用方面的不足,特别是自己的系统的自我学习能力的欠缺,将来要进一步加强,今后的学习还要更加的努力。
本次课程设计不仅仅是对自己所学的知识的一次系统总结与应用,还是对自己体质的一次检验。
六参考文献
1.《机械原理课程设计指导书》徐萃萍冷兴聚
2.《机械原理电算课程设计指导书》冷兴聚
3.《机械原理》孙恒称作模,高等教育出版社,1995.8
4.《C程序设计》谭浩强,清华大学出版社,1995.3
5.《C语言典型零件CAD》王占勇,东北大学出版社2000.9
6.《计算机图形学》罗笑南王若梅中山大学出版社1996.10
7.《机械原理课程设计指导书》裘建新,高等教育出版社,2005.4


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械 原理 课程设计 凸轮 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《城市规划基本知识》深刻复习要点.docx
《城市规划基本知识》深刻复习要点.docx
-
《高电压技术》word版.docx
-
《安全带》gb6095.docx
-
BCP计划应急计划.docx
-
《计算机组成与工作原理》第一章复习题.docx
-
CANON LBP系列激光打印机使用方法指南.docx
-
C语言课程设计火车票系统源代码.docx
-
3热力管道沟槽开挖方法.docx
-
HR岗位职责.docx
-
1 脱硫脱硝cems维护技术规范.docx
-
O2O超市商业项目计划书.docx
-
SCI期刊呼吸胸外.docx
-
18岁生日祝福语短信.docx
-
ITMC物流企业经营沙盘比赛规则.docx
-
XX钢绳成本管理.docx
-
Matlab的第三方工具箱大全强烈推荐.docx
-
安全保卫工作先进个人.docx
-
安全生产工作日记.docx
-
windows 漏洞集合.docx
-
Φ160数控落地镗铣床技术规格.docx
-
安全施工组织设计.docx
-
安全检查和隐患排查治理制度及记录.docx
-
部编版小学二年级语文下册课外阅读专项.docx
-
变电站投运前质量监督检查汇报材料模版.docx
-
版 创新设计 高考总复习 历史 北师大版第一部分 必考内容第十五单元 第38讲.docx
-
本科毕业设计论文.docx
-
北京大学社会心理学串讲笔记1一10章加试题.docx
-
亳州市教坛新星骨干教师学科带头人特级教师年度考核细则知识分享.docx
-
超星尔雅《人生与人心》期末考试满分答案.docx
-
财经法规与会计职业道德案例分析题.docx
-
茶文化会发言稿.docx
-
财务会计核算实习总结.docx
-
个体合伙经营协议书Word下载.docx
-
施工材料试验计划Word下载.docx
-
老兵退伍大会上的讲话文档格式.docx
-
银川市九年级下学期中考一模生物试题II卷Word文档格式.docx
-
学年论文格式范文范海强Word下载.docx
-
高二英语期末复习Word文档下载推荐.docx
-
12慈善故事Word下载.docx
-
六年级上册语文14单元教案Word文档下载推荐.docx
-
扬州市住宅物业管理条例Word文档格式.docx
-
立体设计届高考一轮复习生物课后限时作业三十六文档格式.docx
-
室外消防管道施工方案文档格式.docx
-
高三一模届上海嘉定区高三英语一模含答案Word格式.docx
-
生管部生管的职责和工作流程Word文件下载.docx
-
当归遴选报告0127Word下载.docx
-
80岁老人生日寿宴主持词范文Word格式文档下载.docx
-
模电RC正弦波振荡电路课程设计Word格式文档下载.docx
-
民族民间舞蹈教学4篇文档格式.docx
-
土方劳务分包合同中铁十一局Word下载.docx
-
高中教师个人工作计划与高二政治教师工作计划汇编Word下载.docx
