 制动系统建模仿真及ABS控制器设计文档格式.docx
制动系统建模仿真及ABS控制器设计文档格式.docx
- 文档编号:21855272
- 上传时间:2023-02-01
- 格式:DOCX
- 页数:17
- 大小:193.86KB
制动系统建模仿真及ABS控制器设计文档格式.docx
《制动系统建模仿真及ABS控制器设计文档格式.docx》由会员分享,可在线阅读,更多相关《制动系统建模仿真及ABS控制器设计文档格式.docx(17页珍藏版)》请在冰豆网上搜索。
这里以门限值控制算法为例,说明ABS控制器设计及制动系统力学的仿真过程。
采用门限制控制算法的基本思想是保证车轮滑移率在最理想的范围之内。
制动开始后,随着制动压力的升高车轮转速ω相应减小,车轮出现滑移;
当车轮滑移率达到理想范围上限值Smax时,减小制动压力;
随着制动压力的减小,直至减小到滑移率下限值Smin时再增大制动压力。
循环往复这一过程直至车辆停止。
因此,在ABS控制器起作用的过程中,滑移率总是保持在理想的范围内,从而保证车辆的最佳制动性能及行驶方向控制的稳定性。
4.仿真流程及参数输入
由上可知,ABS控制器所用到的一些控制参数有:
1)由路面附着系数μ与滑移率Sb的关系曲线所表示的轮胎模型;
2)滑移率控制上限Smax、下限Smin;
3)车辆模型参数及初始车速μωo;
4)制动器油压增长率ki和减小率kd等。
根据分析可知,控制逻辑实现的关键是计算当前车轮滑移率Sb(t)并与预先确定的上限值(Smax,Smin)进行比较,来判断对制动液压控制系统的增压或减压操作,控制流程如图3所示。
图3仿真流程
5.实例分析
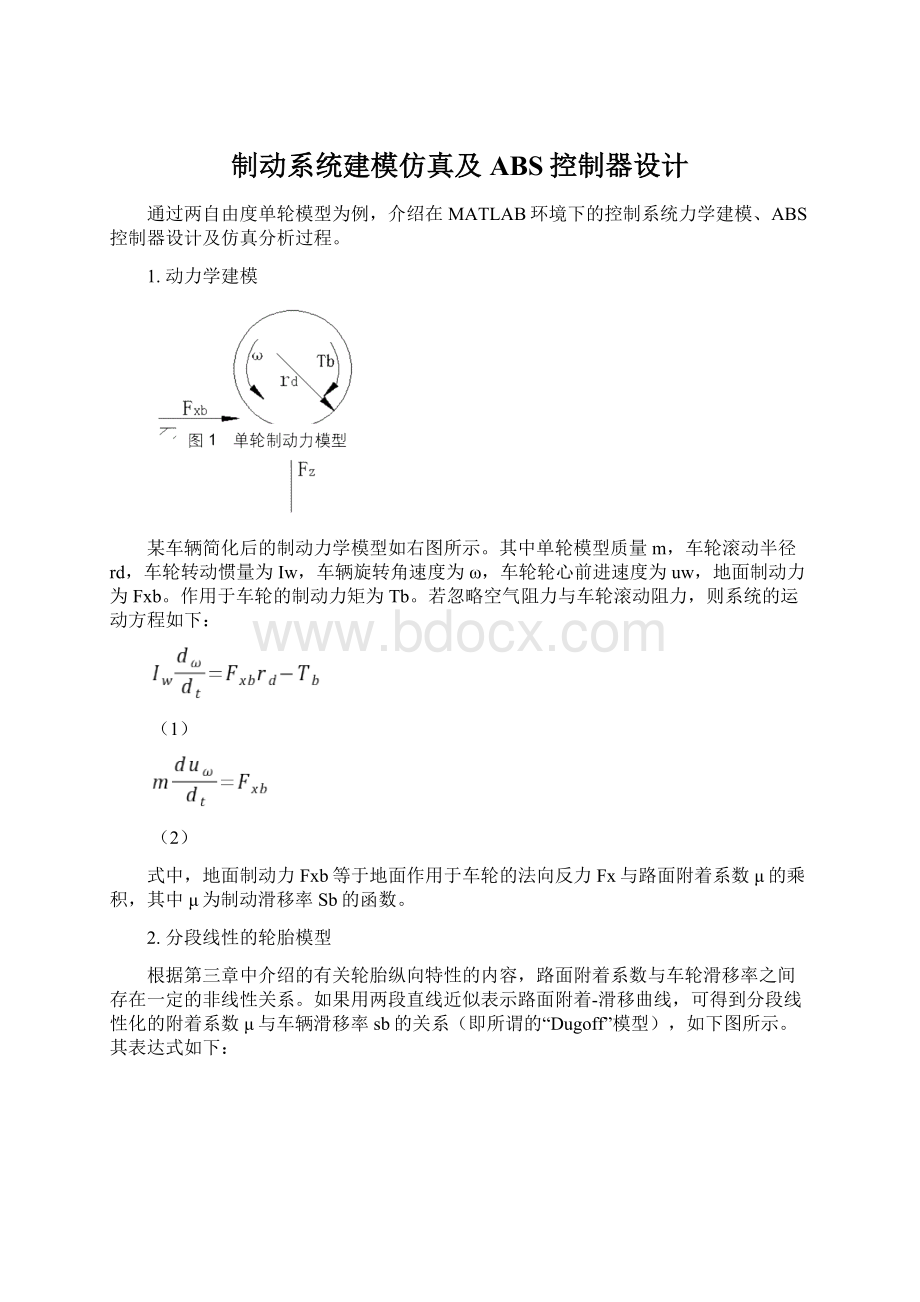
单轮制动动力模型参数由表1给出。
设式图2定义的路面附着系数分别为μh=0.8,μg=0.6.以门限值控制算法设计ABS控制器,使车轮滑移率Sb保持在最优值(Sopt附近),这里令Smin=0.18,Smax=0.22。
根据表1给出的模型参数及附着系数,按照图3所示的控制流程采用m语言编制仿真程序。
需要指出的是,表1给出的制动系统控制参数仅作为参考,系统设计过程中可根据需要适当调整,已获得满意的结果。
表1单轮ABS制动力学模型参数
参数
符号
单位
数值
车轮质量
300
车轮动力半径
0.25
车轮转动惯量
12
初始车速
30
初始角速度
120
初始制动力矩
600
制动油压增长率
4500
制动油压减小率
5000
采样时间
0.05
6.MATLAB仿真过程
6.1.逻辑门限值控制器
Matlab代码如下:
clear
clc
%%输入初始参数
m=300;
%车轮质量
rd=0.25;
%车轮动力半径
Iw=12;
%车轮转动惯量
u0=30;
%初始车速
w0=120;
%初始角速度
Tb0=600;
%初始制动力矩
ki=4500;
%制动油压增长率
kd=5000;
%制动油压减少率
dt=0.05;
%采样时间
u
(1)=u0;
%设置车速数组变量
w
(1)=w0;
%设置轮速数组变量
Tb
(1)=Tb0;
%设置制动压力数组变量
s
(1)=0;
%设置滑移率数组变量
Fxb
(1)=0;
%设置地面制动力数组变量
%%滑移率逻辑门控制
i=1;
while(u(i)>
0)
s(i+1)=(u(i)-w(i)*rd)/u(i);
%计算滑移率
ifs(i+1)<
0.2%计算纵向附着系数
mu=4*s(i+1);
else
mu=0.85-0.25*s(i+1);
end
Fxb(i+1)=m*9.8*mu;
%计算地面制动力
逻辑门控制器
ifs(i+1)<
0.18%与滑移率门限值比较,确定制动力矩
Tb(i+1)=Tb(i)+ki*dt;
elseifs(i+1)>
0.22
Tb(i+1)=Tb(i)-kd*dt;
Tb(i+1)=Tb(i);
dw=(Fxb(i+1)*rd-Tb(i+1))/Iw;
%计算车轮角加速度
du=-Fxb(i+1)/m;
%计算车身加速度
u(i+1)=u(i)+du*dt;
%计算下一时刻车速
w(i+1)=w(i)+dw*dt;
%计算下一时刻轮速
i=i+1;
end
t=0:
dt:
(i-1)*dt;
plot(t,[u'
w'
*rd])
figure()
plot(t,Fxb,t,Tb)
plot(t,s)
运行结果如下:
1)制动器制动力矩与地面制动力随时间变化曲线
2)滑移率随时间变化曲线
3)车速与轮速随时间变化曲线
可以看出:
●基于滑移率的逻辑门限值控制器,可以限制滑移率在给定的最佳滑移率附近波动,汽车完全停止时,车速为零,滑移率趋于无穷大,所以在仿真时间最后一段,滑移率有较大波动。
●制动器制动力矩在滑移率控制器的控制下,可以完成增压、保压、减压动作,防止车轮过早抱死,减小制动距离。
6.2.模糊控制器
6.2.1模糊控制器设计
1)输入量模糊化
●为简化,仅选取滑移率偏差e作为输入量,当最佳滑移率选为0.2时,滑移率偏差范围为【-0.2,0.8】,经过适当变化,使e的变化范围为【-6,6】,以便于控制。
●为简化,仅选取三个语义词【N,Z,P】,即正、零、负。
分别定义各自的隶属度函数,进行模糊化,如下图:
2)输出量反模糊化
●选取制动器制动力矩改变量为输出量,取值范围设定为【-1,+1】。
同样,为简化,选取三个语义词【I,K,D】,即增压、保压、减压。
并定义相应隶属度函数,如下图:
3)模糊规则
●由于仅有一个输入量,且仅选取三个语义词,只需定义三条模糊规则,如下图:
4)控制曲线
●观察制动器制动力矩改变量与滑移率偏差的关系
6.2.2模糊控制matlab仿真过程
程序如下:
dtp
(1)=0;
%设置地面制动力变化量数组变量
%%模糊控制
模糊控制器
e=12*(s(i+1)-0.5);
%将滑移率偏差范围转化到【-6,6】
abs=readfis('
abs_fzy2.fis'
);
%调用设计好的模糊控制器
dtp(i+1)=evalfis(e,abs);
%输出制动器制动力矩变化量
Tb(i+1)=Tb(i)+2*5000*dtp(i+1)*dt;
%计算制动器制动力矩
%%绘图
plot(t,dtp)
运行结果:
1)模糊控制器输出,即Tb的变化量
2)地面制动力与制动器制动力矩
3)滑移率
4)车速与轮速
6.3.PID控制器
●PID控制器的设计
选取滑移率s的偏差e作为输入,若选定最佳滑移率为0.2,则e=s-0.2;
输出量为制动器制动力矩的变化量dtp。
则有,
选取一组合适的系数,
,即可完成PID控制
●MATLAB仿真过程
MATLAB程序代码如下:
%%PID控制器
0.2
PID控制器
e=s(i+1)-0.2;
%计算滑移率偏差
ec=(s(i+1)-s(i))/dt;
%计算滑移率偏差变化率
es=sum(s);
%计算滑移率偏差的累积
dtp(i+1)=Kp*e+Kd*ec+Ki*es;
%计算PID控制输出量,即Tb变化量
Tb(i+1)=Tb(i)-800*dtp(i+1)*dt;
%计算Tb
%ifi>
200
%break;
%end
1)地面制动力与制动器制动力矩
2)滑移率
3)车速与轮速


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 制动 系统 建模 仿真 ABS 控制器 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 1212中级汽车维修工考试试题三.docx
1212中级汽车维修工考试试题三.docx
-
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
CNN代码理解.docx
-
CPA审计第4章审计抽样下载版讲解.docx
-
hr培训管理系统.docx
-
318安通科科长岗位责任制.docx
-
2044施工现场环境污染的防治措施.docx
-
12371党务平台操作手册.docx
-
Catia百格线生成宏复习过程.docx
-
725kV及以上电压等级支柱瓷绝缘子运行规范.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
9920第二学期学校工作总结.docx
-
0911二级技能解答.docx
-
33415设计说明书正文.docx
-
311教育学基础综合大纲.docx
-
201浙江普通高校招生选考科目考试地理试题和答案解析.docx
-
C语言程序的设计实验实验指导书及答案.docx
-
272相似三角形的性质和判定.docx
-
ACCAHA不稳定型心绞痛和非ST段抬高心肌梗死治疗指南修订版摘要.docx
-
baosteel标准对照 外标含量.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
建筑地基基础工程施工质量的验收规范.docx
-
微观经济学复习精炼版.docx
-
《囚绿记》优秀教案.doc
-
中班音乐课教案《海浪》及教学反思精选五篇修改版.docx
-
江汉大学办公自动化OA系统用户操作手册.docx
-
中国巨额国际储备的管理问题分析.docx
-
文本编辑器课程设计报告.docx
-
中山市劳动合同文本官方版1word版本.docx
-
江苏省涟水县学年高二生物下册学业水平测试题.docx
-
问题解决与创造力培养.docx
-
注册测绘师《测绘综合能力》串讲班第六讲.docx
-
五年级语文下册学科教学计划.docx
-
我要投资规划.docx
-
林业个人工作总结多篇.docx
-
隐士沟水库实习论文.docx
-
鲁人版八年级上册思想品德复习提纲.docx
-
人教版二年级科学下册教案.docx
-
用友财务软件功能清单.docx
-
罗大伦博士谈过敏性鼻炎的调理方法.docx
