 机器人构造Word文件下载.docx
机器人构造Word文件下载.docx
- 文档编号:21842970
- 上传时间:2023-02-01
- 格式:DOCX
- 页数:14
- 大小:234.60KB
机器人构造Word文件下载.docx
《机器人构造Word文件下载.docx》由会员分享,可在线阅读,更多相关《机器人构造Word文件下载.docx(14页珍藏版)》请在冰豆网上搜索。
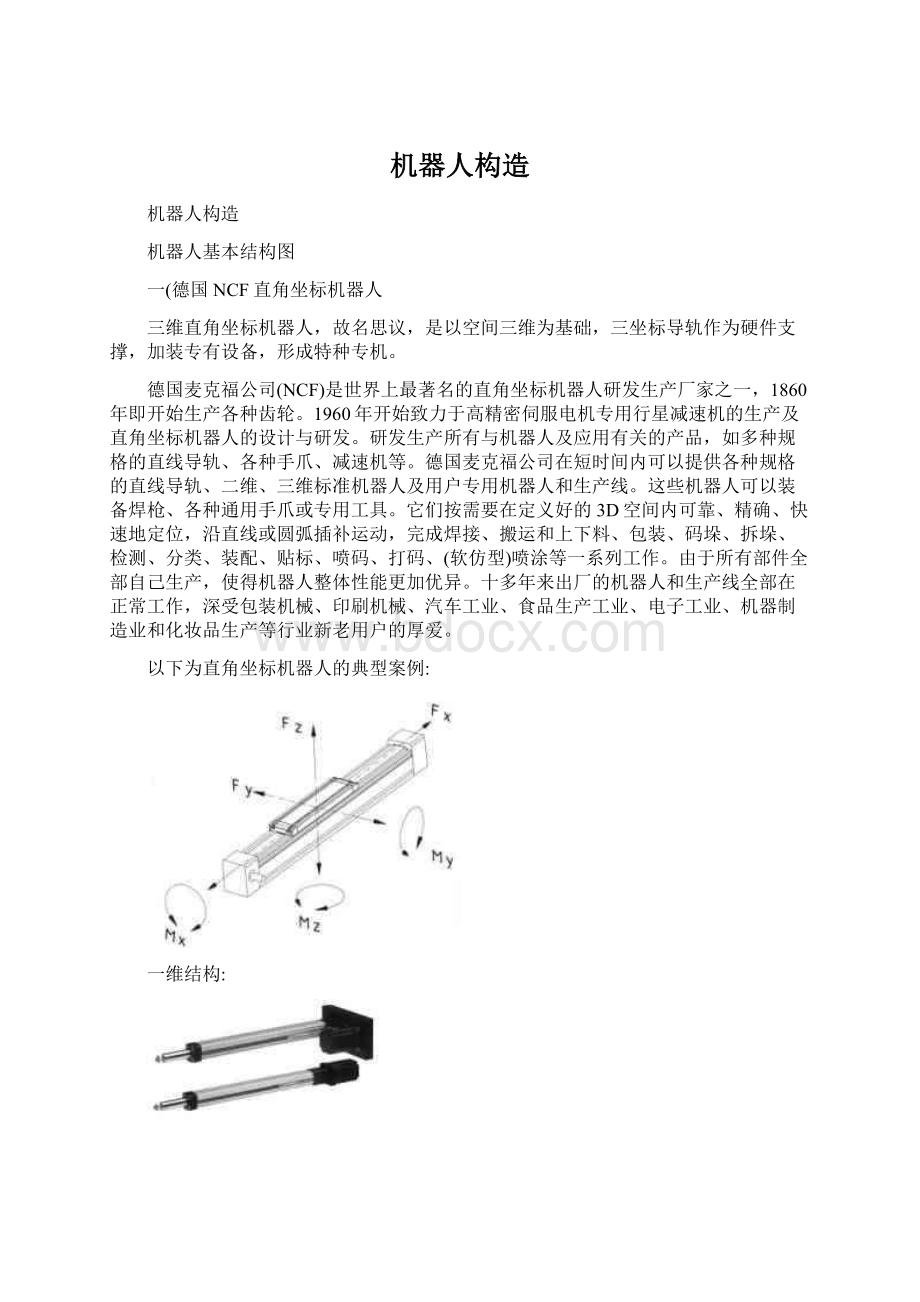
一维结构:
-1-1=425N;
V=1.25m/s;
r=3000min;
重复F=1680N;
重FX大大大X大大大F=425N;
V=5m/s;
a=10m/s2;
重复定位X大大大
定位精度:
?
0.02mm/m;
最大长度L=5m;
F复定位精度:
最大长度L=0.5m。
Z精度:
0.05mm/m;
F=850N;
Z大=1500N;
M=16Nm;
M=80Nm;
M=32Nm.若增大XYZM=16Nm;
M=32Nm.若增加外置导轨XYZ加外置导轨可增加承载能力和扭矩能力。
可增加承载能力和扭矩能力。
FFB系列;
V=5m/s;
a=18m/s2;
重复定FGA齿轮齿条系列;
重复定位精度:
大大FZA系列;
F=2810N;
X大大大
位精度:
0.05mm/300mm;
最大长度L=20m;
最大长度L=5200mm;
Fy大重复定位精度:
最大长度F=2810N;
F=2550N;
M=124Nm;
=30000N;
F=30000N。
X大y大Z大XZ大L=5788mm;
y大Z大XM=168Nm;
M=169Nm.YZ
M=168Nm;
FGA齿形带系列;
DGZ系列;
重复定SQ-II齿轮齿条系列;
V=定制;
重复定位大大大0.05mm/300mm;
F大位精度:
最大长度精度:
最大长度X
=4700N;
F=30000N;
F=10000N。
L=3760mm;
F=1000N;
F=1550N;
FL=29530mm;
F=定制;
Fy大Z大X大y大Z大X大y大Z大
=1570N;
M=29Nm;
M=52Nm;
M=52Nm.=2550N;
M=201Nm;
M=501Nm.XYZXYZ
TCA系列;
最小螺距为5mm,最大螺距为20mm;
丝杆单轴龙门结构,由两根丝杆导轨构成,DBA系列;
重复定大大
最大长度且由一个伺服电机驱动,最长长度可达位精度:
最大长度L=2924mm;
F=3400N;
F=5000N;
F2924mm,最小螺距为5mm,最大螺距为20mm,X大y大Z大L=3750mm;
F=3200N;
F=6000N;
X大y大Z大=6000N;
M=380Nm;
M=430Nm;
M=370Nm.水平承载力可达10000N。
XYZ
M=370Nm.XYZ
丝杆单轴龙门结构,由两根丝杆导轨构成,皮带单轴龙门结构,由一根皮带主动导轨和皮带单轴龙门结构,由两根皮带主动导轨构
且由两个伺服电机驱动,最长长度可达一根从动导轨构成,且由一个伺服电机驱成,且由一个伺服电机驱动,最长长度可达2924mm,最小螺距为5mm,最大螺距为20mm,动,最长长度可达5750mm,V=5m/s,a=18大大5750mm,V=5m/s,a=18m/s2,水平承载大大水平承载力可达10000N。
m/s2,水平承载力可达10000N,若选择力可达10000N,若选择D-LINE系列承载力将D-LINE系列承载力将会更高。
会更高。
两维结构:
皮带式两维龙门结构,由两根皮带主动导轨构丝杆式两维龙门结构,由两根丝杆主动导皮带式两维龙门结构,由一根皮带主动导轨成X轴结构,且由一个伺服电机驱动,Y轴也是轨构成X轴结构,且由两个伺服电机驱动,构成X轴结构,且由一个伺服电机驱动;
Z由一根皮带主动导轨构成,形成两维结构,各Y轴也是由一根丝杆主动导轨和一根从动轴也是由一个根皮带主动导轨垂直连接在X轴总长度可达5750mm,V=5m/s,Y轴水平承载导轨构成,形成两维结构,各轴总长度可轴带滑块上构成,形成两维结构,各轴总长大
力可达5000N(与跨度有关),若选择D-LINE达5750mm,V=5m/s,Y轴水平承载力可度可达5750mm,V=5m/s,Z轴垂直承载力大大系列承载力将会更高。
达30000N(与跨度有关)。
可达4700N。
皮带式两维龙门结构,由一根皮带主动导轨和
一根辅助导轨构成X轴结构,且由一个伺服电机
驱动,Z轴也是由一根皮带主动导轨构成,形成
两维结构,各轴总长度可达5750mm,V=5m/s,大
Z轴垂直承载力可达4700N。
三维结构:
丝杆式三维龙门结构,由两根丝杆主动导轨皮带式三维龙门结构,由两根皮带式主动导皮带式三维悬臂结构,由一根皮带主动导轨构成X轴结构,且由二个伺服电机驱动,Y轴轨构成X轴结构,且由一个伺服电机驱动,和一根从动导轨构成X轴结构,且由一个伺也是由一根丝杆主动导轨构成,且另由一根Y轴也是由一根皮带式主动导轨和一根从动服电机驱动;
Y轴是由一个根皮带主动导轨Z轴丝杆主动导轨作为垂直轴,形成三维龙导轨构成,且由一根皮带式主动轴导轨垂直水平放置,且滑块与X轴滑块固定,另由一门结构,各轴总长度可达2924mm,V=1m/s,使用,形成三维龙门结构,各轴总长度可达根皮带式Z轴导轨滑块连接到Y轴导轨的端大
Z垂直轴最大承载可达3400N。
5750m(一般X轴可做到20m),V=5m/s,Z部使用,形成三维的悬臂结构,各轴总长度大
轴垂直承载力可达2810N(与跨度有关)。
可达1500mm(一般X轴可做到20m),V大
=5m/s,Z轴垂直承载力可达2810N(与Y轴
长度有关)。
皮带式三维壁挂结构,由二根皮带主动导轨皮带式三维龙门结构,由两根皮带式主动导丝杆式三维悬臂结构,由一根丝杆式主动导垂直使用构成X轴结构,且由一个伺服电机轨构成X轴结构,且由一个伺服电机驱动,轨构成X轴结构,且由一个伺服电机驱动;
驱动,Y轴由一根皮带式主动轴导轨和一根Y轴也是由一根皮带式主动导轨和一根从动Y轴是由一根丝杆式主动导轨水平放置,且从动轴导轨水平使用构成,由一个伺服电机导轨构成,且由一根皮带式主动轴导轨垂直导轨与X轴滑块固定,另由一根丝杆式Z轴驱动,Z轴也是由一根皮带主动导轨水平构使用,形成三维龙门结构,各轴总长度可达导轨滑块连接到Y轴导轨的滑块上使用,形成,由一个伺服电机驱动,形成三维壁挂结=5m/s,Z成三维的悬臂结构,各轴总长度可达1500mm5750m(一般X轴可做到20m),V大
构,各轴总长度可达5750mm,V=5m/s,Z轴垂直承载力可达2810N(与跨度有关)。
(一般X轴可做到2924mm),V=5m/s,Z大大轴端部水平承载力可达1000N(与Z轴导轨长轴垂直承载力可达3400N(与Y轴长度有度及Y轴跨度有关)。
关)。
多维结构:
丝杆式四维龙门结构,由两根丝杆主动导轨皮带式多维龙门结构,由两根皮带式主动导皮带式多维龙门结构,该结构是在普通皮带构成X轴结构,且由一个伺服电机驱动,Y轴轨构成X轴结构,该单根导轨上可以装置两式三维龙门结构的基础上,在Z轴滑块上加也是由一根丝杆主动导轨构成,Z轴是由两个电机进行独立控制两个滑块运行,另由两装了两个旋转轴,形成了多轴运动机构,该个可以独立运行的丝杆导轨构成,这样形成套Y、Z轴导轨分别安装在X轴的两个滑块结构各轴长度可达5750mm(一般X轴可做到了四维龙门结构,各轴总长度可达2924mm,上,形成了多轴运动结构,各轴总长度可达20m),V=5m/s,Z轴垂直承载力可达2810N大
V=1m/s,Z垂直轴最大承载可达3400N。
5750mm(一般X轴可做到20m),V=5m/s,(与Y轴长度有关)。
大大
Z轴垂直承载力可达2810N(与跨度有关)。
二(6自由度机械手
沈阳鼎冷机电设备有限公司于2007年开始从事机器人周边设备的设计与研发,经过近两年的
时间,我公司所做的项目已经覆盖了搬运、装配、喷涂、焊接等多个领域。
如下应用案例:
拧扣机械手非防爆喷漆机械手
焊接机械手搬运机械手
涂胶机械手去毛刺机械手
贴标签机械手锻压搬运机械手


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机器人 构造
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
出口外贸人员绩效考核Word文件下载.docx
-
二年级数学上册基于课程标准的教学设计完整版Word格式.docx
-
防坍塌防坠落反三违专项整治活动工作方案Word格式文档下载.docx
-
贵州省毕节市中考物理试题解析版Word格式.docx
-
高考英语一轮复习单元巩固提升 Unit 5 Theme parks 新人教版必修4Word文件下载.docx
-
防洪沟工程施工方案Word文档下载推荐.docx
-
高考作文审题立意技巧多向辐射法+5套高考模拟卷Word格式.docx
-
鼓励外商投资产业单机万千瓦及以上超超临界机组电站建设项目可行性研究报告文档格式.docx
-
高考化学复习第七题docxWord文档下载推荐.docx
-
高考英语作文押题10篇文档格式.docx
-
高中化学《化学能与电能》教案11 新人教版必修2Word下载.docx
-
辐射防护实习报告word范文 11页文档格式.docx
-
贵州省安全生产条例Word下载.docx
-
度第一学期期末考试七年级地理质量分析Word格式.docx
-
高考作文审题立意及练习含问题详解文档格式.docx
-
发动机实训教案Word文件下载.docx
-
高中语文《第四单元情动于衷而形于言10赤壁赋》125课件教案教学设计文档格式.docx
-
关于《荷塘月色》的优秀教案Word格式文档下载.docx
-
混凝土工程外观弊病的原因分析及预防文档格式.docx
 党支部书记抓基层党建工作述职报告.docx
党支部书记抓基层党建工作述职报告.docx
- 最新西师版数学四年级下册教案Word文档下载推荐.docx
- 尊敬的各位老师大家下午好今天我就小学英语中的语音Word文件下载.docx
- 最新经济法基础模拟试题与答案文档格式.docx
- 最新高一数学上学期期中检测必修1+数学试题3优秀名师资料Word格式文档下载.docx
- 装配式结构住宅楼脚手架搭设方案Word格式文档下载.docx
- 最新人教部编版小学语文四年级上册21古诗三首说课稿Word格式文档下载.docx
- 重庆市中考英语真题试题A卷含答案新文档格式.docx
- 专题71 力考点题型解密解析版Word文档格式.docx
- 总务护士工作总结范文五篇Word格式.docx