 微电脑控制应用实例概要Word格式文档下载.docx
微电脑控制应用实例概要Word格式文档下载.docx
- 文档编号:21742988
- 上传时间:2023-02-01
- 格式:DOCX
- 页数:19
- 大小:84.86KB
微电脑控制应用实例概要Word格式文档下载.docx
《微电脑控制应用实例概要Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《微电脑控制应用实例概要Word格式文档下载.docx(19页珍藏版)》请在冰豆网上搜索。
PA..3
PA..2
PA..1
PA..0
正常
尖峰
ShapeIndex
7
6
5
4
3
2
1
T1(正常/尖峰)
□
■
10
21H
T2(正常/尖峰)
22H
T3(正常/尖峰)
0CH
T4(正常/尖峰)
14H
Tx1(夜間閃爍)
0.5
20H
Tx2(夜間閃爍)
02H
-
x
+&
H80
KB0(4x4鍵盤)
手動
A1H
KB1(4x4鍵盤)
KB2(4x4鍵盤)
KB3(4x4鍵盤)
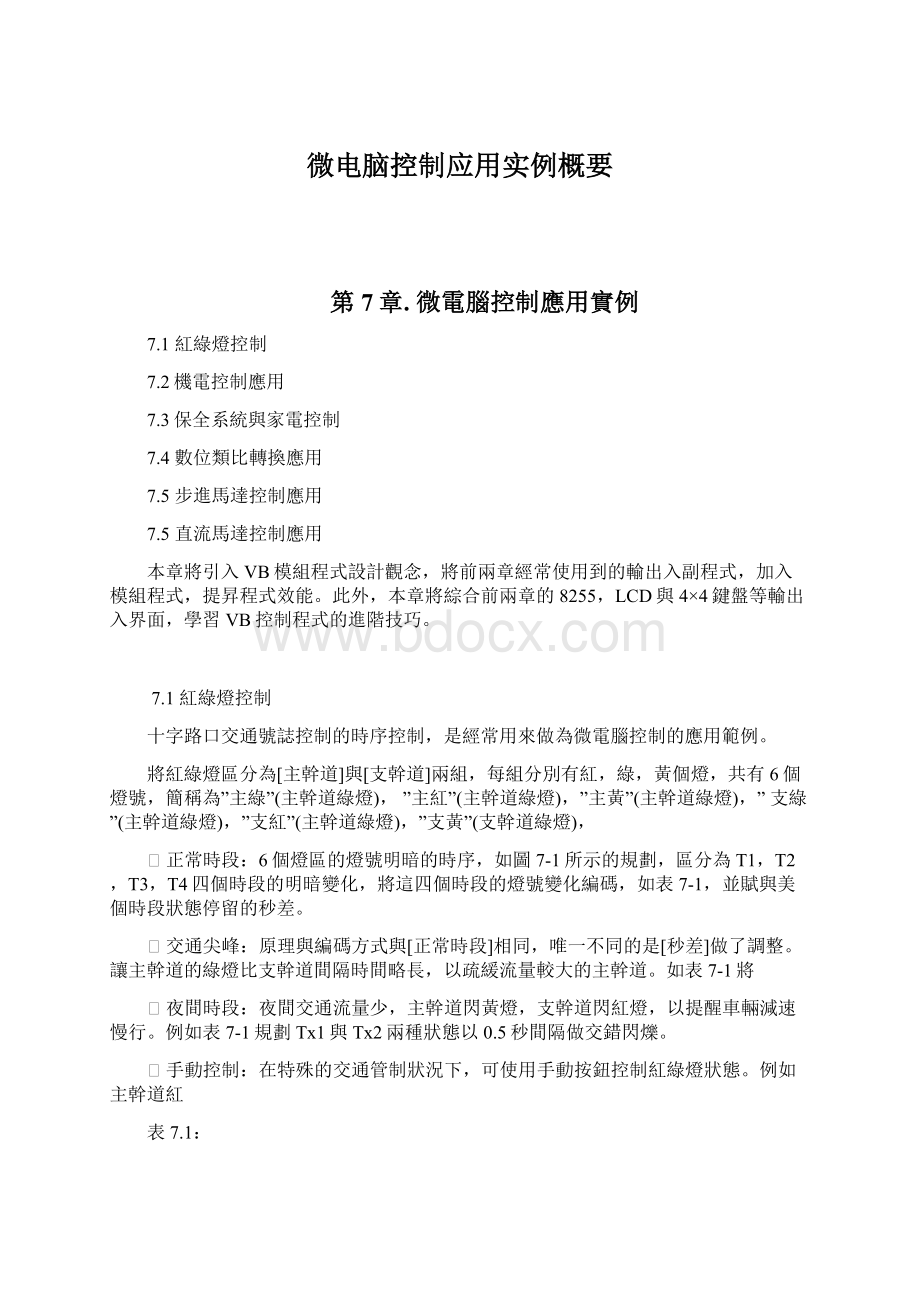
圖7.1:
紅綠燈正常時段
我們藉由以下的範例7-1練習,熟悉此邏輯運算控制接點狀態的功能。
【範例7-1】紅綠燈監控
依照表7-1的規劃功能,使用VB建立一紅綠燈監控程式,操作程序如下
(1)開啟VB程式,並新建一個[專案],在新表單加入控制項,並設定其屬性,表單上的控制項清單如表7-1。
表7-:
範例6-6的控制項清單
物件
物件名稱(name)
功用
備註
列示方塊
List1
提供展示功能選項清單
計時器
Timer1
提供一個延遲時間
Enabled=False,Interval=10
Timer2
Timer3
Timer4
形狀
Shape1(0~7)
使用8個形狀陣列的填入色彩Shape1(i).FillStyle顯示PA輸出埠狀態
預設Shape1(i).Color=Red
Shape1(i).Shape=0-矩形
(i=0~7)
工具列
Toolbar1
加入四個按鈕,分別執行廣告燈的正轉,反轉,暫停等功能
操作步驟參考第3章
範例3-6。
圖片清單
ImageList1
提供工具列顯示圖示
文字標籤
Label2
提示使用者選取功能選項
屬性Caption=”展示功能選單”
通訊埠
MSComm1
建立與實驗板的通訊
(2)
加入[基本輸出]主功能表的F_BIO_Click()事件程式,利用功能表索引(Index),分別執行全部開啟(&
HFF),全部關閉(&
H0),反相(NotWR_dat1),並將執行動作顯示在狀態列上,程式碼如下:
PrivateSubF_BIO_Click(IndexAsInteger)
SelectCaseIndex
Case0:
WR_dat1=&
HFF'
強制PA埠全部開啟
Case1:
WR_dat1=&
H0'
強制PA埠全部關閉
Case2:
WR_dat1=NotWR_dat1'
強制PA埠反相
EndSelect
CallCALLDisp_Led(ch6_2.shape1,8,WR_dat1)
CallWR_8255(ch62,"
PA"
WR_dat1)
'
將執行動作顯示在狀態列上
StatusBar1.Panels
(2).Text=F_BIO.Item(Index).Caption
EndSub
說明
表單上的副程式與模組檔案的副程式,最大的差異是前者只能在自己表單上使用,後者則可提供所有表單使用。
這對副程式的修改與維護,也有極大便利性。
微電腦控制應用在工業本節將整合第三章的輸出控制與本章前半部的輸入即時監控,應用在一般機電控制系統上。
驅動,隔離與制動技術
微電腦輸出的小電流、小電壓控制信號,若要應用在大功率負載的工業用機電開關,必須考慮電氣隔離技術,以避免兩個系統間的干擾。
⏹繼電器:
輸入端為一組電磁鐵,當導通電流產生磁性,會感應輸出接點的閉合或斷開,當電流消失,輸出接點又回復原始狀態。
微電腦控制繼電器,一般採用電晶體驅動
⏹固態繼電器:
簡稱SSR,是一種半導體電路組成的無接點繼電器。
功能與傳統繼電器相同,但沒有機械式接點,輸入端與輸出端兩者間採光耦合電路做隔離,具有壽命長,反應快,低雜訊,低功率消耗,可靠度高等優點,是目前常用到。
SSR具有4支接腳,編號1,2為輸出端,無極性;
編號3,4為輸入端,3為正(接5V),4為負(接驅動信號)。
一般SSR的驅動方式可採用TTLIC直接驅動,如使用7404反相器驅動。
⏹
【範例7-2】機電控制應用
將8255的PA埠規劃為八個負載輸出,將PC埠規劃為八個開關輸入。
讀者可以先使用實驗板上的LED顯示,觀察輸出狀態﹔使用指撥開關模擬輸入開關。
如圖所示。
圖2.29:
總電源開關
1號
開關
R
S
2號
暫停
工作
對應輸出接點
PA.3
PA.2
PA.1
PA.0
功能1
開啟電源等待
功能2
開啟1號開關
功能3
開啟2號開關
功能4
關閉1號開關
0/1
功能5
關閉2號開關
功能6
關機
註:
x表示0與1皆可
由附表的規劃功能,輸出資料必須先做下列的運算:
⏹功能1,執行開啟電源處於等待狀態,經編碼得知為&
HC1(11000001),因此可將此資料直接輸出到PA埠。
⏹功能2,執行開啟1號開關,其中四個接點狀態必須分別設為PA.5=ON,PA.4=ON,PA.3=OFF,PA.0=OFF。
先將PA埠狀態與&
H30(00110000)做OR運算,再和&
HF6(11110110)做AND運算。
運算的結果再輸出到PA埠。
⏹功能3,執行開啟2號開關,其中三個接點狀態必須分別設為PA.2=ON,PA.1=ON,PA.0=OFF。
H06(00000110)做OR運算,再和&
HFE(11111110)做AND運算。
⏹功能4,執行開啟1號開關,其中四個接點狀態必須分別設為PA.5=ON,PA.4=ON,PA.3=OFF,PA.0=OFF。
⏹在功能3,若要關閉啟2號開關,將PA埠狀態與&
HF6做AND運算。
其它功能以此類推。
範例執行的結果可由PA埠對應的LED的明暗狀態觀察得知。
操作步驟如下:
(3)開啟VB程式,並新建一個[專案],在新表單加入三個物件,並設定其屬性,表單與物件功能與設定如下表6-6:
表4-6
表單
Form1
本程式的主表單
Caption=”8255基本輸出練習2”
指令按鈕
Command1
執行功能1
(開啟電源等待狀態)
屬性Caption=”開啟電源”
Command2
執行功能2
(開啟1號開關)
屬性Caption=
”開啟1號開關”
Command3
執行功能3
(開啟2號開關)
”開啟2號開關”
Command4
執行功能4
(關閉1號開關)
”關閉1號開關”
Command5
執行功能5
(關閉2號開關
”關閉2號開關”
執行功能6
屬性Caption=”執行”
Label1
顯示目前工作狀態
屬性Font.size=20
在實際電機應用場合中,控制接點大部份是110V以上的交流負載。
因此在輸出端還必須加裝一般的繼電器(Realy),或工業電子元件,如SSR(固態繼電器)、SCR、TRIAC等。
輸入
輸出
1.
單一開關
控制一個負載
2.
兩個串聯開關
3.
兩個並聯開關
4.
兩個互斥開關
5.
三開關串並聯
6.
控制兩個負載
7.3家電控制與保全系統
資料處理
洗衣機
冰箱
電視
陽台燈
大門燈
浴室燈
主臥室燈
客廳燈
電燈全部開啟
×
Or&
H1F
電燈全部關閉
And&
HE0
開啟電視
H20
關閉電視
HDF
開啟冰箱
H40
關閉冰箱
HBF
開啟洗衣機
H80
關閉洗衣機
H7F
【範例7-3A】家電控制
(4)開啟VB程式,並新建一個[專案],在新表單加入控制項,並設定其屬性,表單上的控制項清單如表7-1。
感測元件
類別
溫
度
感
測
溫度開關
TH125,TH85
隨溫度變化而改變導通(On)與不導通(Off)狀態的開關。
一般應用在家用電熱器與工業上
熱敏阻器
VEI310
隨溫度變化而改變電阻大小,u
溫度感測元件
AD590
電流型IC溫度感測
白金溫度感測器
Pt100
熱電偶
光
焦電型紅外線感測器
E001S
光遮斷器
SG-23FF
紅外線感測器
發射元件EL-7L
受光元件ST-7L
紫外線感測器
R2868
光敏阻器
CDS
顏色感測器
紅色S6428;
綠色S6429;
藍色S6430
氣
體
氣體感測器
TGS822
瓦斯感測器
TGS800
溼度感測器
H204C
機
械
力
壓力感測器
SCC05D
負荷囊(LoadCell)
FAD60
超音波音波感測器
MA40S2R
霍爾元件
LB-10GA
開
關
近接開關
微動開關
磁簧開關
【範例7-4】保全系統
微電腦控制的輸出入資料的處理,大都以數位訊號資料為主。
但自實際應用的系統中,必須使用具有連續性的類比訊號,例如電壓,溫度,位移,語音,流量...等。
這些類比訊號必須轉換為
鬧一般談的數位/類比
⏹DAC(Digital-AnalogConverter):
例如將PA埠的PA.5與PA.2這兩個接點強制開啟
(1)。
將PC埠資料與&
H24做OR運算,結果如表6-3:
接腳
VR+,VR-
B1~B8
數位資料輸入
COMP
Iout,Iout\
類比互補式電流輸出(Iout,Iout\電流總和為定值
⏹ADC(Digital-AnalogConverter):
在當今自動化的資訊世界中,步進馬達(steppingmotor)扮演重要角色。
例如電腦週邊的磁碟機、印表機,工業自動化的CNC工具機,順序控制系統以及機械人…等,無不以步進馬達做為傳動的重心。
因此談到微電腦控制,一定少不了要談到如何應用到步進馬達的控制應用。
本節將簡單介紹步進馬達的驅動原理,馬達驅動電路的製作,以及如何使用VB程式控制步進馬達的正反轉,轉速,與轉角。
步進馬達驅動原理
步進馬達必須藉脈衝訊號驅動馬達轉子。
依定子線圈的相數不同,可分為3相、4相與5相激磁方式,使用電源有5V與12V。
每送入一個脈衝電流,轉子即轉動一固定角度即停住,這個角度稱為步進角。
一般4相50齒的步進馬達走200步,剛好轉一圈,因此,步進角=360/相數/轉子齒數=360/4/50=1.8
步進四每一步階以固定轉角轉動,因此若加入適當的連續脈衝訊號,可讓馬達以步階方式連續轉動。
線圈激磁順序可以改變馬達的轉動方向,脈衝頻率與轉動速度成正比。
明。
激磁方式
步進馬達的激磁方式有三種
⏹單相激磁﹕每步只有一個相位被激磁,耗電少,角度精確,但阻尼振盪大,容易產生共振,因此較少採用。
⏹兩相激磁﹕同一時間有兩相線圈被激磁,耗電量是單相的兩倍,因此轉距也是單相的兩倍,但阻尼振盪低,可適用較大頻寬。
⏹半步激磁﹕將單相與兩激磁交互運用,其輸入電流量是單相的1.5倍,因此轉距也是單相的兩倍,但阻尼振盪低,可適用較大頻寬。
驅動電路
一般步進馬達激磁電流之切換速度快(數百到數KHz),通常使用高功率達靈頓電晶體做切換電路。
因此一個四相的步進馬達,需要四組高功率的達靈頓電晶體驅動電路,如圖所示。
目前也有很多四組包裝的高功率達靈頓IC,型號為FT5754,各可推對3A之能力。
(約80元)
常用的步進馬達驅動電路也有下列三種:
⏹電晶體驅動﹕例如TIP41與C1384電晶體組成的達靈頓對,以滿足步進馬達的規格5V,1.5A。
⏹使用FT5754﹕內含4組NPN達靈頓對,且具飛輪二極體,輸出可承受最大電流為3A。
⏹使用PMM8713專用IC﹕為CMOS結構,電源電壓工作範圍為+4V~18V,輸出最大電流可達20mA。
16支IC接腳功能如表7-XX。
Cu,Cd
第1組正、反轉控制輸入(u代表up正轉,d代表down反轉)
Ea,Eb,Ec
CK,U/D
第2組正、反轉控制輸入(CK代表up正轉,d代表down反轉)
Vcc
電源接腳,工作範圍為+4V~18V
Vss
接地端
A
Ea
Eb
Ec
Cu
Cd
ck
1相激磁
正轉
H
L
反轉
2相激磁
1,2相激磁
圖2.24:
步進馬達驅動電路
FT5754
步進馬達啟動
了解步進馬達的驅動原理後,我們就實際應用微電腦送出的脈衝訊號,驅動步進馬達。
首先我們規畫8255PA埠的低四位元(PA0~PA3)做為驅動4相式步進馬達的控制訊號線。
並分別採用單相、兩相與半步
步進馬達的正反轉,轉角與轉速
本節我們將建立一個具有實用價值的步進馬達驅動程式,其中包含步進馬達的程序控制
有了上一節建立的步進馬達驅動程式step_motor(),可應用在更複雜的步進馬達轉動程序控制。
統監控與資料儲存,交換與再處理工作。
以下是一簡單的應用實例。
晶體結構分析
(1)
(2)開啟程式碼視窗,在Form_Load事件程式呼叫”MVB.BAS”的open_com()模組程式,開啟RS-232通訊埠,程式如下:
(3)'
(4)選取功能表[專案]-[新增模組]指令,在[新增模組]對話方塊的[開啟]選項選取先前建立的”MVB.BAS”模組程式,選取[開啟舊檔]指令按鈕。
進入模組程式碼視窗。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 微电脑 控制 应用 实例 概要
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
知识管理系统需求分析新教学文案.docx
-
质检工作手册1.docx
-
中级经济基础练习题5260docx.docx
-
中考作文之中考满分作文关于友情.docx
-
中职计算机应用基础教案第四章.docx
-
组织行为学薪酬作为奖励机制对员工地影响.docx
-
最新车工工艺试题库.docx
-
最新高效节能循环流化床锅炉可行性研究报告.docx
-
最新精选人教版高中历史必修1 政治史第三单元 近代西方资本主义政治制度的确立与发展第7课 英国君主立宪制.docx
-
最新汕头市龙湖区届中考化学模拟试题有答案.docx
-
学年广东省广州市天河区初二期末物理卷含答案及解析.docx
-
学生干部培训学生干部地能力素质和工作方法.docx
-
药物过敏反应和处理.docx
-
一年级数学上册第四八单元教案教学设计.docx
-
医务督查反馈持续改进.docx
-
银行业法律法规与综合能力考试重点.docx
-
硬件工程师第18章.docx
-
幼儿教师职业道德规范学习心得体会5篇.docx
-
语文江苏卷解析doc.docx
