 伺服脉冲监控及增益地调节方法0Word文件下载.docx
伺服脉冲监控及增益地调节方法0Word文件下载.docx
- 文档编号:21522502
- 上传时间:2023-01-31
- 格式:DOCX
- 页数:13
- 大小:500.53KB
伺服脉冲监控及增益地调节方法0Word文件下载.docx
《伺服脉冲监控及增益地调节方法0Word文件下载.docx》由会员分享,可在线阅读,更多相关《伺服脉冲监控及增益地调节方法0Word文件下载.docx(13页珍藏版)》请在冰豆网上搜索。
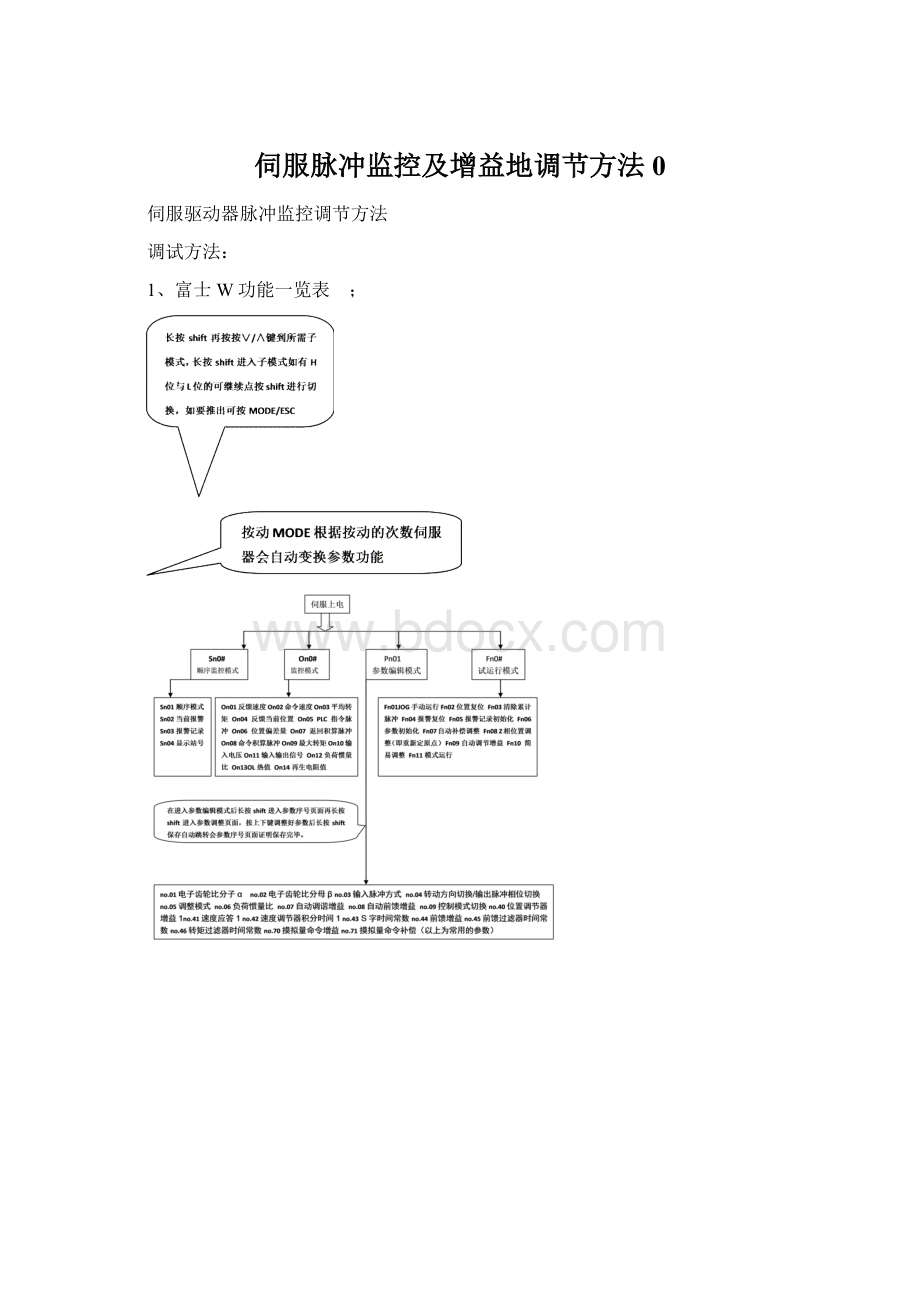
按∧键、∨键进行高低位切换。
名词解释:
反馈脉冲数:
是指伺服电机执行的驱动器的脉冲数反馈,即伺服驱动器发送给伺服电机执行的脉冲总数量;
指令脉冲数:
是指PLC发送给驱动器的脉冲总数量;
两数值比较:
正常运行的情况下,以上两者数值相同,相差不超过1~2个数值,否则伺服系统存在执行误差。
同一数值不同循环间的比较:
指令脉冲数每个循环之间比较,数值相同则接收正常,即PLC发送正常,否则可能为PLC发送异常或伺服器接收异常,两者必有其一;
若指令脉冲每模均相同,而执行脉冲数不同,则伺服系统存在执行异常。
伺服驱动器增益(刚性)调节方法
适用情况:
什么情况下要调节,即什么表现时需要调节,如电机跳动,电机异响等
1、富士W型:
SMART型:
06负荷惯量比PA1-14负载惯性力矩比
40位置调节增益PA1-55位置环路增益1
41速度应达PA1-56速度环路增益1
42速度调节器积分时间PA1-57速度环路积分时间常数1
2、松下A4:
松下A5
Pr20惯量比Pr0.03实时自动增益的刚性选择
Pr22实时自动增益的刚性选择Pr0.04惯量比
Pr10第1位置环增益Pr1.00第1位置环增益
Pr11第1速度环增益Pr1.01第1速度环增益
Pr12第1速度积分时间常数Pr1.02第1速度积分时间常数
3、台达:
P1-37负载惯量比
P2-00位置控件比例增益
P2-02位置控制前馈增益
P2-04速度控制增益
KM3-600~1000
KM3-1200~1600
KM3-2200~3000
KM5-W
富士W型
单轴400W
引拔
上下
Pn1-01
64
8192
16384
Pn1-02
1
125
125/175
375
Pn1-03
Pn1-04
0/1
Pn1-05
2
Pn1-06
6
Pn1-15
4
Pn1-18
11
Pn1-40
35
Pn1-41
Pn1-42
150
Pn1-43
12
KM3-1000~1500
富士S型
横行
PA1-03
PA1-04
PA1-05
2000
2800
PA1-13
10
PA1-14
15
14
PA1-51
380
PA1-53
PA1-55
45
PA1-56
40
PA1-57
30
PA1-70
PA1-71
110
PA1-72
PA1-73
PA1-74
95
PA1-75
PA1-76
PA2-65
2/1
PA3-52
KM3-1900、2000
KM5-800
KM5-1000~1400
松下A4
Pr.1a
999
Pr.20
500
Pr.21
Pr.30
Pr.41
1/0
Pr.42
3
Pr.44
56
97
56/80
126
Pr.48
10000
5
5/16384
Pr.4b
8000
4/125
Pr.4c
Pr.6c
KM3-1600~2000
KM5-1200
松下A5
Pr0.00
Pr0.01
Pr0.02
Pr0.04
250
1080
Pr0.05
Pr0.06
Pr0.07
Pr0.08
3000
Pr0.11
80
Pr0.16
台达
横走
P0-06
P2-24
P0-08
17
P2-31
34
P0-13
21E
P2-50
P0-14
306
P3-00(永宏)
P1-00
0/2永宏
P3-01
P1-01
1/101
P3-02
7
P1-34
300/200
P3-05
P1-35
P1-36
500/800
P1-37
8
P1-38
200
P1-44
25/5永
P1-45
1/4永宏
P1-46
100561009710126永
100441005610080
P1-47
0213
P1-48
50
P1-49
P1-54
300
P2-00
16
P2-02
P2-04
2500
P2-06
P2-11
124
P2-12
104
P2-15
122
P2-16
123
P2-17
121
P2-19
108


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 伺服 脉冲 监控 增益 调节 方法
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
力学基础第一节剖析.docx
-
门窗工程量清单案例.docx
-
人教新目标版八年级英语下册Unit9Haveyoueverbeentoamuseum测试题2.docx
-
丽水市本级河道整治规划报告.docx
-
蒙台梭利跳跳班2224个月.docx
-
如何开展社会主义核心价值观教育.docx
-
辽宁省高中生物学竞赛试题及答案扫描版.docx
-
秘书实务与案例分析.docx
-
如何做到精心备课.docx
-
林登约翰逊与民权法案.docx
-
民办幼儿园章程范本3篇.docx
-
软件设计说明手册XXX子系统分层级的V10.docx
-
临床医学小讲课教案模板.docx
-
模板就业前的自我分析与职业选择评估.docx
-
三年级第1单元英语教案.docx
-
六路抢答器课程设计附程序.docx
-
山东基础会计继续教育完美.docx
-
山东省东营市七年级生物上册月考试题附答案.docx
-
山东省泰安市宁阳县中考数学模拟试题扫描版.docx
