 基于matlab的模糊PID控制仿真实验报告文档格式.docx
基于matlab的模糊PID控制仿真实验报告文档格式.docx
- 文档编号:20823093
- 上传时间:2023-01-25
- 格式:DOCX
- 页数:13
- 大小:457.09KB
基于matlab的模糊PID控制仿真实验报告文档格式.docx
《基于matlab的模糊PID控制仿真实验报告文档格式.docx》由会员分享,可在线阅读,更多相关《基于matlab的模糊PID控制仿真实验报告文档格式.docx(13页珍藏版)》请在冰豆网上搜索。
1。
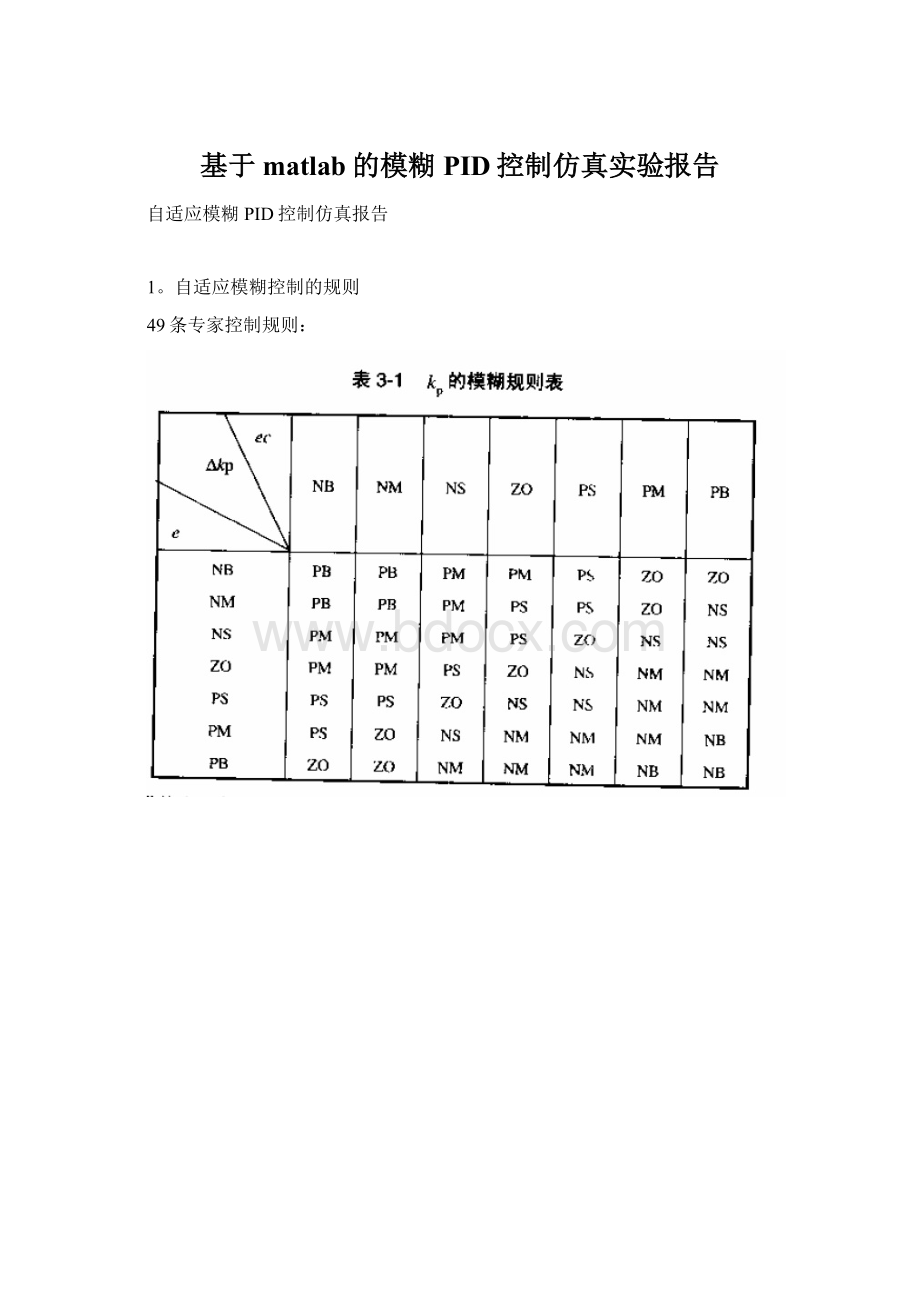
自适应模糊控制的规则
49条专家控制规则:
2。
系统仿真框图
包括模糊控制器,PID控制器两部分组成。
3.模糊控制器设计
确定为双输入,三输出结构
确定每个变量的论域,其中每个变量都有一个模糊子集来表示。
这个模糊子集中有7个语言变量,分别是:
NB,NM,NS,ZO,PS,PM,PB
在编辑界面中,确定好每一个语言变量的范围,以及隶属函数的类型。
如下图所示:
输入模糊控制规则:
仿真结果
PID控制器Kp参数在控制过程中的变化曲线:
Ki参数:
Kd参数:
系统闭环控制阶跃响应曲线:
传统PID控制响应曲线:
(ZN整定法)
对比可以发现,自适应模糊PID控制不仅使曲线超调量小,响应过程平稳,而且动态响应时间也较短.性能优于传统PID控制器。
对比如下:
(PID采用cohen-coon整定法)红色为常规PID控制器,黄色为模糊PID控制器
采用ZN法整定后对比:
而且在仿真中发现一个问题:
ZN法整定存在不稳定问题,但模糊控制则非常平稳
加干扰的控制对比
系统框图
对比效果:
对应的模糊PID参数变化情况:
P
PI
PD


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 matlab 模糊 PID 控制 仿真 实验 报告
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
该用户的其他资源 更多>>
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
猜你喜欢
-
理想演讲稿9篇Word下载.docx
-
面包砖2Word文档下载推荐.docx
-
描写樱花的唯美句子Word文件下载.docx
-
气象灾害灾害分类分级标准文档Word下载.docx
-
李超物业管理心得说课讲解Word文档格式.docx
-
历年自考市场营销策划试题及答案Word文档格式.docx
-
汽车服务运营手册Word下载.docx
-
培训积分管理制度Word下载.docx
-
链增长缩聚反应 Chain Growth CondensationWord文件下载.docx
-
祁东县易地扶贫搬迁项目灵官镇安置点脚手架方案Word文档下载推荐.docx
-
汽车舒适与安全系统检修授课计划Word格式文档下载.docx
-
量子计算机未来的计算革命Word文件下载.docx
-
汽轮机重要操作票Word文档格式.docx
-
临床执业医师考试强记忆必背重点 Microsoft Word 文档 3Word文档格式.docx
-
列主元高斯消去法和列主元三角分解法解线性方程精编资料Word文档下载推荐.docx
-
浅 谈 设 备 安 装Word文件下载.docx
-
浅谈小学语文教学中如何渗透德育教育Word文档下载推荐.docx
-
临淄中学期末测试高二历史试题Word格式.docx
-
嵌入式微处理器实训报告Word文档下载推荐.docx
关于本文
相关资源
更多
