 SEW伺服程序编辑步骤Word格式.docx
SEW伺服程序编辑步骤Word格式.docx
- 文档编号:20724094
- 上传时间:2023-01-25
- 格式:DOCX
- 页数:8
- 大小:195KB
SEW伺服程序编辑步骤Word格式.docx
《SEW伺服程序编辑步骤Word格式.docx》由会员分享,可在线阅读,更多相关《SEW伺服程序编辑步骤Word格式.docx(8页珍藏版)》请在冰豆网上搜索。
*1嵐IU-Dis>
lfiV
HM1S>
tji«
iTiU/r»
pfUMfitors
<
-JU2Cmiroll*TFwi4t«
irc
T1豊3;
M«
t#rparctors
可溜4R«
£
trwc«
sx^i«
Qs
亍掰-MJ.L.LE1-L/f_LL;
ji.H^诃歳B•TerniDfllosiavteDt十阚了Controlfwn.cti™s
卜BLfri.1hfnnci]cue
斗9..TFOSp-sa-anatcre
*|Atpplicat-ar.3
+_Jieati(iiUul1tLe±
AppLjcs.lljils
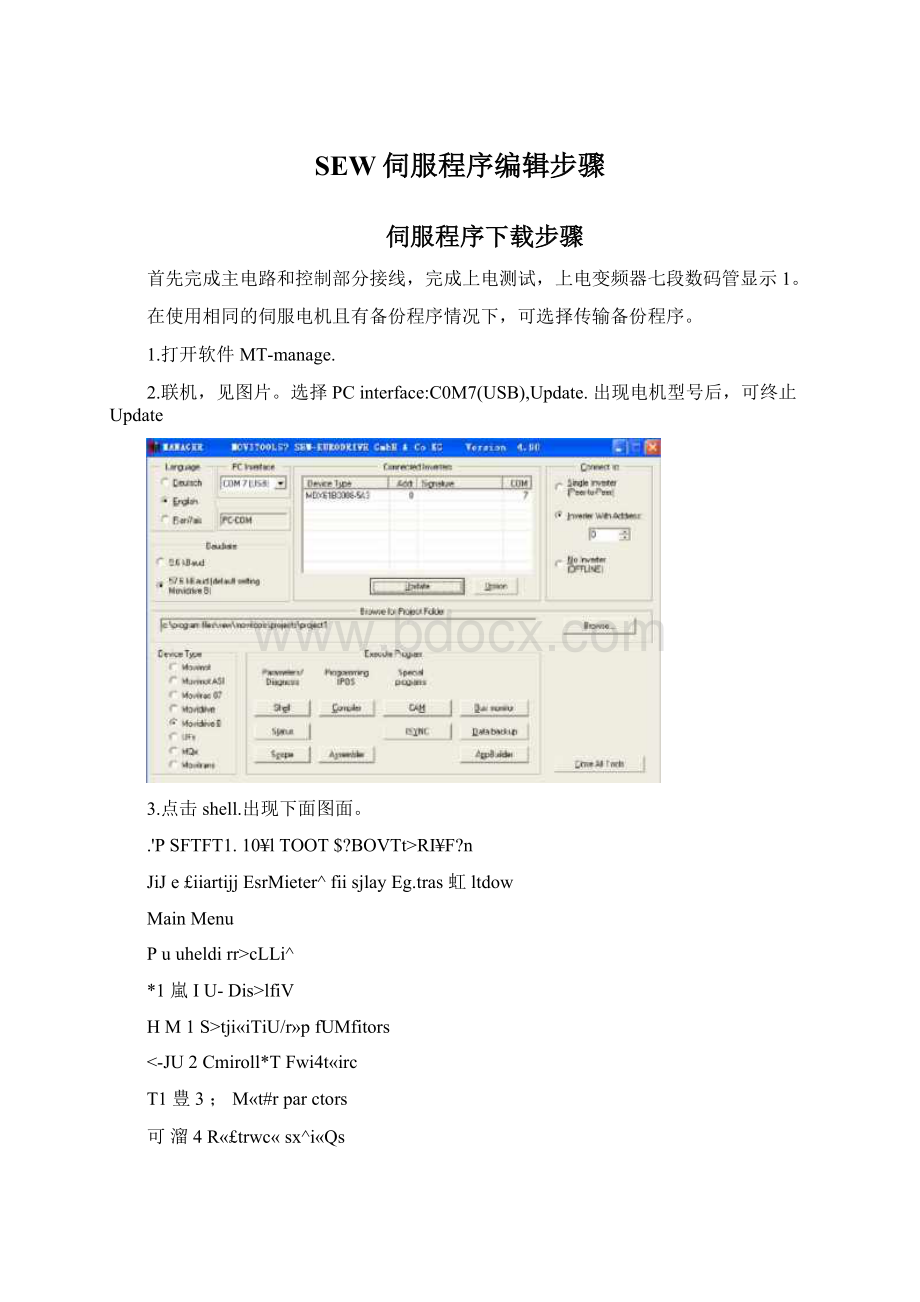
4.选择copyunitdata,出现下面画面。
叨SHELL■D¥
ITOOLS?
IOVIDKIVE?
fi
FilsStartupPtr^jnetarEUispl&
yEx>
tr«
.5WindowMelp
盍曰已老3丨昌缪
^tart
Cancel
在上面from…选择我们的备份程序,在下面to…选择inverter.然后点击start按钮。
5.程序传输完成后,启动程序(start)或点击闪电图标。
三•没有备份程序,可进行初始化操作+下载IPOS程序。
初始化操作如下:
1.点击start-up.出现下面画面。
注意控制器和马达的型号和参数。
2.点击Start-upSet1.出现下面画面。
3.选择Executecompletestart-up.点击"
下一步”按钮。
出现下面画面。
4注意马达型号和其他参数。
点击“下一步”
。
出现下面画面
Servo
Mot-or
type
1
Motor
raced
voltage
[VI
rated
speed
[rpmj
Mains
m
530Sensortype1
[nohesponse二
|NOSENSOR
<上一步⑧下一歩迎>1
取消1
5.选择“下一步”出现下面画面。
Possibleapplicattoils
IX
「Operatingmode
广Speedcontrol
ru^ehoist
US-6DC-brsikin^
iU-E-eH^irrgrestartcircuit
「厂Usesynchronousoperationcontrol[DR3]
•Positionmgv^ithiP0§
IUsetorqueojnlrol
<上下1歩g)I取消I
6.选择PositioningwithIPOS.点击"
下一步”。
7.Loadinertia选择电机带动负载重量(工程经验值JOmotor参数的5-8倍)。
选择完后,
点击"
下一步”,出现下面画面。
ParametersServo
App^ip<
oposal
8.设置电流极限值(200%)、转速监视时间(1S)。
.再点击“下一步’,出现下一画面。
SpeedControllerParapeters
Parameters
200
Pgain,speedcont-rall&
r
Timeconstantn-cantco1・
202
Gainaccel.feedforward
Filte匚
speedactual
115
rilter
getpaint
[ms]
203
Filtet
accel.
210
Pgain
heldcontroller
910
coDt-roller
Proposal
Ownlaadvalue
[i?
4i
0741
|64-
[64~
0.569
[Z99-
1.49
2.99
[105-
[los-
[1Q5-
I105-
i如曲propcsdlj
<上一^但)|下一歩道)》|
9.控制器参数接受建议值,点击”Applyproposal”•再点击"
下一步’,出现下一画面。
"
下一步’,出现download画面。
povrnkiadstart-upparameters
Thecabiiationthestart-uppdrametersts匚ompletei
Tojlownloadthecaciriatedpar=metBr-&
totheim'
ertecandtocompletethestart-uppressthebultor<
Finsh>
Todownloadthecacidatedparcmeterstotheimerterwithoutcorrpletngtheslatt-uppessthebutton
V上一步⑧)]筈戍I观消I
11.点击download,把参数下载下去。
12.打开软件。
参数6。
Terminalassignment设置参照实际输入输出。
参数870-876设置可参考下面
执行下载然后点击“start”按钮或闪电标记。
13.选择手动操作,验证控制器和电机接线是否正确;
刹车是否正常释放;
机械是否卡堵或
过载。
在进行手动操作测试前,要保证DI00=1即X13的第1个端子要有24VDC
■anualOperation
SetpoirMSpeed{tptri]
F7"
Var«
fatespeed
FB-Skwspeed
F9»
FlaDtd料州
Dradbondfltfjlion
F2-CCW
BO
F3=CW
f11-START
601W0
钉IjJ
F6*Coritrfl4winhbif
14.IPOS程序下载方法:
ActLialValues
Status
Actualposiiian|hc]
Actualspeed(l/nfdn]
CutpUcurtent(船]
bin,Inputs
bm.Outputs
R-Reset
DI0..
DI1
DO0
DO1
u
厂
厂厂rrrr
4厂r
3_r厂
厂厂
F=Rdefencetravel
打开软件,与控制器连接上。
打开“机器人夹具最终。
IPC”。
ESC^Clase


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- SEW 伺服 程序 编辑 步骤
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
最新大学生职业生涯规划书范文三篇2 精品Word格式文档下载.docx
-
网络总体建设目标Word格式文档下载.docx
-
幼儿园小班数学教案《学习5以内数的组成》及教学反思5篇Word文件下载.docx
-
唯美恋爱短信Word文件下载.docx
-
中班新年的礼物教案文档格式.docx
-
学校广播体操比赛主持词三篇Word下载.docx
-
最新寄生虫学吸虫部分复习题Word文档格式.docx
-
中勘协建筑电气分会华南地区学组成立大会电气设计疑难问题研讨会议纪要Word格式文档下载.docx
-
最新人教课标六年级上册语文期末试题及答案4Word文档下载推荐.docx
-
文秘技师习题答案Word格式文档下载.docx
-
我爱家乡的四季作文精选Word格式文档下载.docx
-
我的教学风格37545复习过程Word格式.docx
-
友益文书845版破解记录精品指南Word下载.docx
-
学校毕业生自我鉴定范文合集九篇文档格式.docx
-
学生给家长的一封信XX七篇Word文件下载.docx
-
五年级作文说明文植物三百字作文Word文档格式.docx
-
我让有限的生命活出无限的价值语文Word格式文档下载.docx
-
魏晋玄学与庄学新变Word文档格式.docx
-
小学六年级语文上册《负荆请罪》教案苏教版Word格式.docx
