 MATLAB程序全套整合.docx
MATLAB程序全套整合.docx
- 文档编号:20099191
- 上传时间:2023-04-24
- 格式:DOCX
- 页数:68
- 大小:923.70KB
MATLAB程序全套整合.docx
《MATLAB程序全套整合.docx》由会员分享,可在线阅读,更多相关《MATLAB程序全套整合.docx(68页珍藏版)》请在冰豆网上搜索。
MATLAB程序全套整合
1.全景图到穹景图
这个程序我最初是用FreeImage写的,这两天改成了matlab,再不贴上来,我就要忘了。
看到一篇文章有这样的变换,挺有意思的,就拿来试了一下,文章点此。
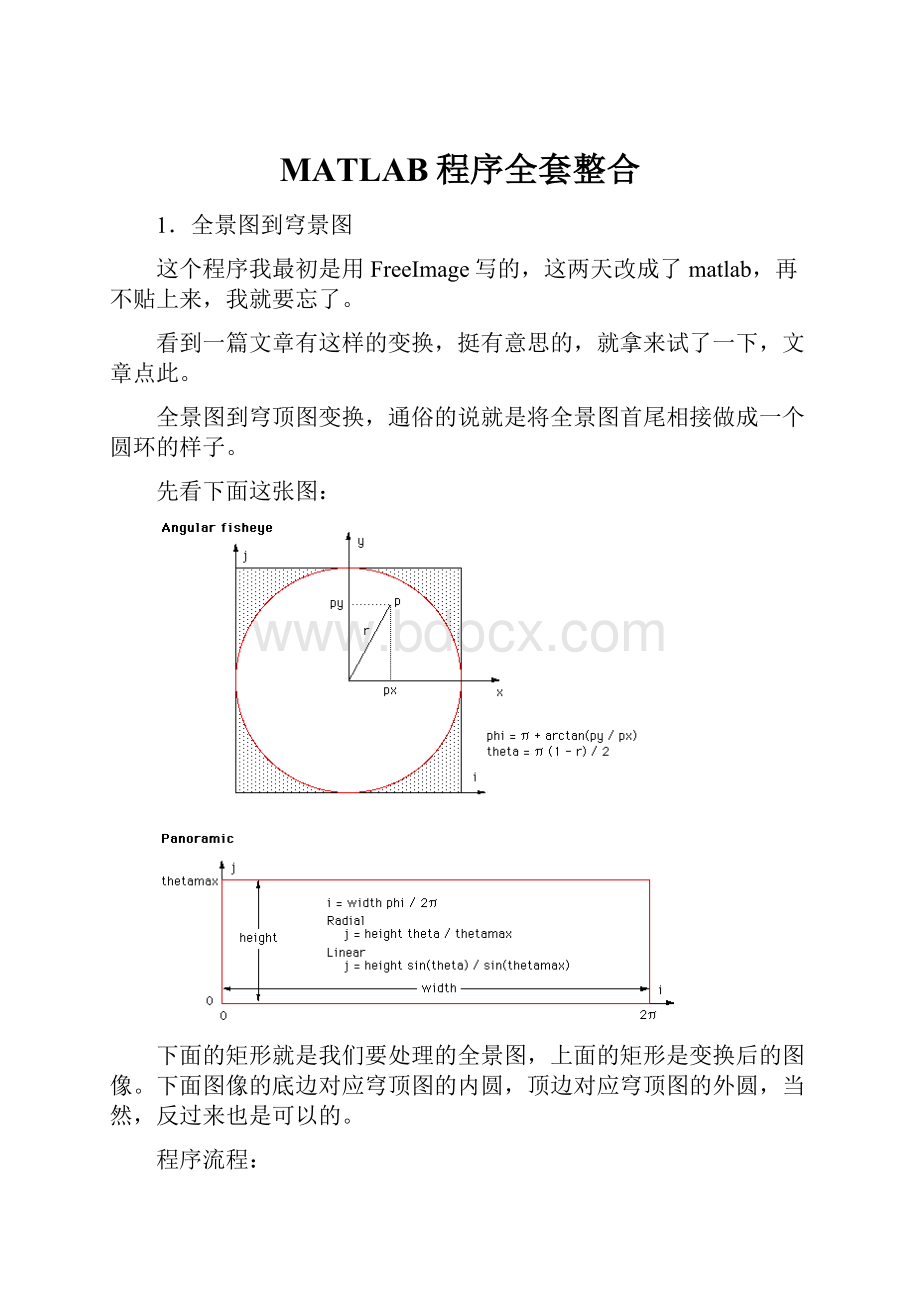
全景图到穹顶图变换,通俗的说就是将全景图首尾相接做成一个圆环的样子。
先看下面这张图:
下面的矩形就是我们要处理的全景图,上面的矩形是变换后的图像。
下面图像的底边对应穹顶图的内圆,顶边对应穹顶图的外圆,当然,反过来也是可以的。
程序流程:
1.定义穹顶图内圆和外圆的半径,变换后的像素就填充在这个内外半径的圆环中。
2.遍历穹顶图,当所处理当前像素位于圆环内,则通过极坐标反变换去全景图中寻找相应位置的像素进行填充。
3.遍历完图像就行了。
用的技巧和图像旋转或放大缩小都是类似的。
处理结果:
原图:
结果:
matlab代码如下:
clearall;
closeall;
clc;
img=imread('pan.jpg');
imshow(img);
[m,n]=size(img);
r1=100;%内环半径
r2=r1+m;%外环半径
imgn=zeros(2*r2,2*r2);
[re_m,re_n]=size(imgn);
fory=1:
re_m
forx=1:
re_n
dis_x=x-re_n/2;
dis_y=y-re_m/2;
l=sqrt(dis_x^2+dis_y^2);
ifl<=r2&&l>=r1
theta=0;
ify>re_m/2
theta=atan2(dis_y,dis_x);
end
ify theta=pi+atan2(-dis_y,-dis_x); end ify==re_m/2 theta=atan2(dis_y,dis_x)+0.0001; end xx=ceil(n*theta/(2*pi)); yy=ceil(l-r1); ifyy>=1&&yy<=m&&xx>=1&&xx<=n imgn(y,x)=img(yy,xx); end end end end figure; imshow(imgn,[]) 最后要说的是,一般我们要是有一张全景图,通常会用cubic映射,将图像变换为立方体的六个面,然后通过图形学方法贴到立方体上,就能做出类似谷歌街景的样子。 cubic映射应该才是全景图最常用的处理方法,不过那又是另一类变换了。 2.GUI保存图像 %---Executesonbuttonpressinpushbutton5. functionpushbutton5_Callback(hObject,eventdata,handles) %hObjecthandletopushbutton5(seeGCBO) %eventdatareserved-tobedefinedinafutureversionofMATLAB %handlesstructurewithhandlesanduserdata(seeGUIDATA) globalsrc_img; [filename,pathname]=uiputfile({'*.jpg';'*.bmp';'*.gif';'*.png';'*.tif'},'WritePic'); str=[pathnamefilename]; ifstr~=0 imwrite(src_img,str); end 3.GUI读入图像 %---Executesonbuttonpressinpushbutton1. functionpushbutton1_Callback(hObject,eventdata,handles) %hObjecthandletopushbutton1(seeGCBO) %eventdatareserved-tobedefinedinafutureversionofMATLAB %handlesstructurewithhandlesanduserdata(seeGUIDATA) [filename,pathname]=uigetfile({'*.*';'*.jpg';'*.bmp';'*.gif';'*.png';'*.tif'},'ReadPic'); str=[pathnamefilename]; globalsrc_img; if~isequal([pathname,filename],[0,0]) src_img=imread(str); axes(handles.axes1); imshow(src_img); end 4.GUI选项卡 1.在这个网址下载一个工具包,里面应该有四个文件: tabselectionfcp.p、tabselectionfcn.m、tabpanel.p和tabpanel.m,显然代码用.p格式进行加密了。 2.建立一个空GUI文件,就起名kong.fig吧。 3.在kong.fig上画一个StaticText,默认的tag为text1。 4.终端运行tabpanel('kong.fig','text1');命令,得到如下界面: 5.点击addpanel就能添加选项卡了,如图: 6.选中不同的选项卡,点击edit,就能进入常见的GUI编辑模式: 7.编辑完保存下就行了,所有的功能都在kong.m文件中实现。 注意,不同选项卡添加的组建时,tag会有重复,因此需要修改tag名。 8.终端输入kong就能得到如下结果: 5.structuretensor结构张量 根据结构张量能区分图像的平坦区域、边缘区域与角点区域。 此算法也算是计算机科学最重要的32个算法之一了。 链接的文章中此算法名称为Strukturtensor算法,不过我搜索了一下,Strukturtensor这个单词好像是德语,翻译过来就是structuretensor结构张量了。 此处所说的张量不是相对论或黎曼几何里的张量,黎曼几何的张量好多论文都叫张量场了。 也不是数学界还没研究明白的对矩阵进行扩展的高阶张量,主要是张量分解。 这里的结构张量就是一个矩阵,一个对图像像素进行组织的数据结构而已。 像素组织而成的矩阵如下: 这个公式太常见了,在harris角点检测中就用到了。 其中Ix,Iy就是原对原图像在x和y方向求得的偏导。 然后求矩阵E的行列式K和迹H。 然后根据K和H的关系就能区分图像的区域模式了。 模式分以下三类: 平坦区域: H=0; 边缘区域: H>0&&K=0; 角点区域: H>0&&K>0; harris角点检测就用到了第三类判断。 当然,在实际应用的时候H和K的值肯定都不会是理想,所以我用的都是近似判断。 处理结果如下: 原图: 平坦区域: 边缘区域: 角点区域(好像也不全角点,求角点还是harris好了): 结构张量行列式与迹的关系: 其中红框为平坦区域,黄框为边缘区域,铝框为角点区域。 matlab代码如下: clearall;closeall;clc; img=double(imread('lena.jpg')); [mn]=size(img); imshow(img,[]) [IxIy]=gradient(img); Ix2=Ix.^2; Iy2=Iy.^2; Ixy=Ix.*Iy; k=1; lambda=zeros(m*n,2); fori=1: m forj=1: n st=[Ix2(i,j)Ixy(i,j);Ixy(i,j)Iy2(i,j)];%结构张量 K=det(st);%求行列式 H=trace(st);%求迹 %所有的判断都是近似的 %ifH<50%认为是平坦区域 %ifH>50&&abs(K)<0.01*10^(-9)%认为是边缘区域 ifH>50&&abs(K)>0.01*10^(-9)%认为是角点区域 img(i,j)=255; end lambda(k,: )=[KH]; k=k+1; end end figure; plot(lambda(: 1),lambda(: 2),'.'); ylabel('trace');xlabel('det'); figure; imshow(img,[]) 6.模糊集图像增强 算法有很多变种。 不过主要就是以下三步。 1.设计隶属度函数将图像从空间域变换到模糊集域。 2.设计模糊增强算子,在模糊集域对图像进行处理。 3.根据第1步的隶属度函数重新将图像从模糊集域变换到空间域。 这和频域处理中的变换反变换不是很像么。 我使用的隶属度函数和模糊增强算子在这篇论文里,也算相关算法的经典论文了。 处理结果如下: 原图: 模糊集增强后: matlab代码如下: clearall;closeall;clc; img=double(imread('lena.jpg')); imshow(img,[]) [mn]=size(img); Fe=1; %控制参数 Fd=128; xmax=max(max(img)); u=(1+(xmax-img)/Fd).^(-Fe);%空间域变换到模糊域 %也可以多次迭代 fori=1: m%模糊域增强算子 forj=1: n ifu(i,j)<0.5 u(i,j)=2*u(i,j)^2; else u(i,j)=1-2*(1-u(i,j))^2; end end end img=xmax-Fd.*(u.^(-1/Fe)-1);%模糊域变换回空间域 figure; imshow(uint8(img)); 7.随机游走图像 随机游走类似布朗运动,就是随机的向各个方向走吧。 虽然代码没什么技术含量,不过产生的图像实在太漂亮了,所以还是贴上来吧。 产生的图像: matlab代码如下: clearall;closeall;clc n=70000;%游走的步数。 也是图像中像素个数,有些位置可能重复,所以白像素小于等于n x=0;%初始x坐标 y=0;%初始y坐标 pix=zeros(n,2);%游走产生的像素坐标 neighbour=[-1-1;-10;-11;0-1;01;1-1;10;11];%当前像素邻域 fori=1: n r=floor(1+8*rand());%八邻域随机选一个来走 y=y+neighbour(r,1);%y方向游走 x=x+neighbour(r,2);%x方向游走 pix(i,: )=[yx];%保存坐标 end miny=min(pix(: 1));%图像坐标不可能为负,所以找最小值再整体提升为正 minx=min(pix(: 2));%同上 pix(: 1)=pix(: 1)-miny+1;%像素坐标整体变为正 pix(: 2)=pix(: 2)-minx+1; maxy=max(pix(: 1));%找最大坐标值,为开辟图像做准备 maxx=max(pix(: 2)); img=zeros(maxy,maxx);%根据maxy、maxx产生图像 fori=1: n%将游走的值赋给图像 img(pix(i,1),pix(i,2))=1; end imshow(img) 8.最大流/最小割 学习这个算法是为学习图像处理中的图割算法做准备的。 基本概念: 1.最大流是一个有向图。 2.一个流是最大流,当且仅当它的残余网络中不包括增广路径。 3.最小割就是网络中所有割中值最小的那个割,最小割是不唯一的,不过最小割的值是唯一的。 4.最大流的流量等于某一最小割的容量。 算法思想就是Ford-Fulkerson方法。 具体流程: 1.首先使用广度优先搜索找到源节点到汇节点的一条路径,为增广路径。 2.如果找不到新的从源到汇的增广路径,则上一次求得的网络就是最大流,否则向下执行。 3.找出增广路径中最小的路径的值。 5.用路径中最小的值构造最大流网络,原网络包含这个网络。 4.将增广路径中所有的路径减去最小路径这个值,形成新的网络图。 6.对新的网络图继续执行第1步。 网络图如下,没什么好办法形象表示。 我比较懒,不想画图了,真想看明白过程就看算法导论405页。 原网络: 最大流: matlab代码如下: clearall;closeall;clc %初始化邻接压缩表,算法导论405页的图 b=[1216; 1413; 2312; 2410; 349; 3620; 424; 4514; 537; 564]; m=max(max(b(: 1: 2)));%压缩表中最大值就是邻接矩阵的宽与高 A=compresstable2matrix(b);%从邻接压缩表构造图的矩阵表示 netplot(A,1); maxflow=zeros(m,m); while1%下面用广度优先搜索找增广路径 flag=[];%相当于closed表,已访问过的节点 flag=[flag1]; head=1; tail=1; queue=[];%队列,相当于open表,将要访问的节点 queue(head)=1; head=head+1; pa=zeros(1,m);%每个节点的前趋 pa (1)=1;%源节点前趋是自己 whiletail~=head%广度优先搜索,具体细节就不注释了 i=queue(tail); forj=1: m ifA(i,j)>0&&isempty(find(flag==j,1)) queue(head)=j; head=head+1; flag=[flagj]; pa(j)=i; end end tail=tail+1; end ifpa(m)==0%如果搜索不到汇节点,退出循环 break; end path=[]; i=m;%从汇节点开始 k=0;%路径包含的边的个数 whilei~=1%使用前趋构造从源节点到汇节点的路径 path=[path;pa(i)iA(pa(i),i)];%存入路径 i=pa(i);%使用前趋表反向搜寻,借鉴Dijsktra中的松弛方法 k=k+1; end Mi=min(path(: 3));%寻找增广路径中最小的那条边 fori=1: k A(path(i,1),path(i,2))=A(path(i,1),path(i,2))-Mi;%增广路径中每条路径减去最小的边 maxflow(path(i,1),path(i,2))=maxflow(path(i,1),path(i,2))+Mi;%最大流,原网络包含这个网络,我只能这样表示了 end%使用新的图A进入下一循环,从新开始找增广路径 end figure; netplot(maxflow,1) 9.单元最短路径 图的相关算法也算是自己的一个软肋了,当年没选修图论也是一大遗憾。 图像处理中,也有使用图论算法作为基础的相关算法,比如图割,这个算法就需要求最大流、最小割。 所以熟悉一下图论算法对于图像处理还是很有帮助的。 Dijkstra和Bellman-Ford类似,都是解决单源最短路径问题,不同的是这个方法只能解决边为非负的问题,实现的好的Dijkstra算法运行时间要快于Bellman-ford。 算法步骤如下: 1.首先设置队列,所有节点入列,源节点值为0,其他节点值为无穷。 2.然后在队列中找值最小的节点并出列。 3.计算出列的节点所有后继节点的距离。 4.松弛方法,如果新计算的距离小于上次计算的距离,那么更新距离,即将后继节点值设为较小的距离,并将后继节点的前趋设为当前的出列节点。 5.对剩余的节点队列继续找最小值并出列,不断循环2、3、4步直到队列中没有节点了。 步骤是上面没错,不过我程序中没有完全按照上述的步骤实现。 不同的地方在于我没有做出列操作,而是通过标记节点的形式实现的。 运行结果如下,图(是图不是图片)是算法导论367页上的: matlab代码如下,netplot和compresstable2matrix和上一篇使用的一样: main.m clearall;closeall;clc %初始化邻接压缩表,1210表示从节点1到节点2,边的权重为10 b=[1210;145;231; 242;354;423; 439;452;517; 536]; m=max(max(b(: 1: 2)));%压缩表中最大值就是邻接矩阵的宽与高 A=compresstable2matrix(b);%从邻接压缩表构造图的矩阵表示 netplot(A,1)%形象表示 S=inf(1,m);%从开始的源点到每一个节点的距离 S (1)=0;%源点到自己的距离为0 pa=zeros(1,m);%存储每个节点的前驱,在松弛过程中赋值 pa (1)=1; %源点的前趋是自己 visit=zeros(1,m);%标记某个节点是否访问过了 index=1;%从index节点开始搜索 %判断是否对所有节点都找的最短路径了。 可能会有源点没有路径到目标节点的情况,那就无限循环了 whilesum(visit)~=m%没有出队列操作,不过通过visit来等价的表示了 visit(index)=1;%标记第index节点为已入列的节点 [Spa]=relax(S,pa,A,visit,index,m);%松弛,如果两个节点间有更短的距离,则用更短的距离 index=extract_min(S,visit,index,m);%使用已访问的最小的节点作为下一次搜索的开始节点 end %最终我们需要的就是这两个值 S%源点到其他每一点的距离 pa%其他每一节点的前趋 %算法到此结束,下面只是为了形象的表示而写的。 re=[]; fori=2: m re=[re;pa(i)iA(pa(i),i)]; end A=compresstable2matrix(re);%从邻接压缩表构造图的矩阵表示 figure; netplot(A,1)%形象表示 relax.m %边缘松弛,使用更短的距离作为节点的值 function[Spa]=relax(S,pa,A,visit,index,m) i=index; forj=1: m ifA(i,j)~=inf&&visit(j)~=1%搜索没有标记过的节点 ifS(j)>S(i)+A(i,j)%将较小的值赋给正在搜寻的节点 S(j)=S(i)+A(i,j); pa(j)=i; end end end end extract_min.m %提取队列中尚未标记的最小的值的序号 functionindex=extract_min(S,visit,index,m) Mi=inf; forj=1: m ifvisit(j)~=1 ifS(j) Mi=S(j); index=j; end end end end 10.单元最短路径 该算法可以用来解决一般(边的权值为负)的单源最短路径问题,而dijkstra只能解决权值非负的情况。 此算法使用松弛技术,对每一个顶点,逐步减少源到该顶点的路径的估计值,直到达到最短的路径。 算法运算结果: matlab代码如下,netplot函数在这里,不过当时函数中表示两节点没有路径用的是0,而现在需要改成inf: clearall;closeall;clc %初始化邻接压缩表 b=[126; 147 235; 248; 25-4; 32-2; 43-3; 459; 512; 537]; m=max(max(b(: 1: 2)));%压缩表中最大值就是邻接矩阵的宽与高 A=compresstable2matrix(b);%从邻接压缩表构造图的矩阵表示 netplot(A,1)%形象表示 S=inf(1,m);%源到其他节点的最短距离,开始为inf S (1)=0;%源点到自己的距离为0 pa=zeros(1,m);%寻找到的节点的前趋 pa (1)=1;%源点的前趋是自己 pre_pa=ones(1,m); whilesum(pre_pa==pa)~=m%终止条件,判断终止的方法很多,这个应该不是最佳实践 pre_pa=pa; fork=1: m ifpre_pa(k)~=0%对每一个已搜寻到的节点,从此节点寻找后继节点 i=k; forj=1: m ifA(i,j)~=inf ifS(j)>S(i)+A(i,j) S(j)=S(i)+A(i,j);%边缘松弛,取两节点间最小权值作为实际权值 pa(j)=i;%寻找前趋 end end end end end end %最终我们需要的就是这两个值 S%源点到其他每一点的距离 pa%其他每一节点的前趋 %算法到此结束,下面只是为了形象的表示而写的。 re=[]; fori=2: m re=[re;pa(i)iA(pa(i),i)]; end A=compresstable2matrix(re);%从邻接压缩表构造图的矩阵表示 figure; netplot(A,1)%形象表示 compresstable2matrix.m functionA=compresstable2matrix(b) [n~]=size(b); m=max(max(b(: 1: 2))); A=inf(m,m); fori=1: n A(b(i,1),b(i,2))=b(i,3); end end 11. 如此经典的算法竟一直没有单独的实现过,真是遗憾啊。 广度优先搜索在过去实现的二值图像连通区域标记和prim最小生成树算法时已经无意识的用到了,深度优先搜索倒是没用过。 这次单独的将两个算法实现出来,因为算法本身和图像没什么关系,所以更纯粹些。 广度优先搜索是从某一节点开始,搜索与其线连接的所有节点,按照广度方向像外扩展,直到不重复遍历所有节点。 深度优先搜索是从某一节点开始,沿着其搜索到的第一个节点不断深入下去,当无法再深入的时候,回溯节点,然后再在回溯中的某一节点开始沿另一个


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- MATLAB 程序 全套 整合
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《地质测量图绘制细则》.docx
《地质测量图绘制细则》.docx
-
《大学生健康教育教程》考试题库500题DR含答案.docx
-
《黄鹤楼送孟浩然之广陵》字词注释.docx
-
《葱爆羊肉》概要.docx
-
《面向对象程序设计》C++综合练习学生版.docx
-
《化学反应工程》课程综合复习资料.docx
-
《社会心理》网上形考参考答案.docx
-
《轮扣式支架》模板施工方案.docx
-
《团委新成员大会主持稿1》.docx
-
《三峡学典》思品七上.docx
-
《有效备课上课听课评课》读书笔记.docx
-
《土地的誓言》导学案.docx
-
1汽车维修专业人才需求调研报告.docx
-
《应用文写作》教学设计.docx
-
1级三相费控智能电能表技术规范.docx
-
17#楼机房层模板施工方案.docx
-
《稻草人》精彩读书笔记精选多篇doc.docx
-
《机械制造工艺与装备》复习资料.docx
-
《木兰从军》教案.docx
-
《神奇的毛细现象》.docx
-
《围城》读书心得精选范文1000字5篇.docx
-
《幼儿园是我家》大班教案.docx
-
1资产负债表变动情况的分析评价.docx
-
5s活动总结报告5s总结报告2篇.docx
-
《当代学生》初中文言文阅读训练篇.docx
-
《机械制造工艺学》电子教案.docx
-
《民事案件案由规定》物权纠纷案由的理解与适用.docx
-
《社会学研究方法学习心得5篇范文》.docx
-
《外商投资企业联合年检报告书》填写要求和指标说明.docx
-
《幼儿园课程论》形成性考核册答案27497.docx
-
1在直接影响物价水平的诸多因素当中.docx
-
10套普通话练习材料.docx
-
人教版小学一年级数学教案上册全册Word格式.docx
-
音乐教案《单簧管波尔卡》Word下载.docx
-
人美版七年级下第14册全册美术教案Word下载.docx
-
潍坊初中学业水平化学模拟考试二文档格式.docx
-
英语书面表达练习全集Word文件下载.docx
-
印刷合同Word格式.docx
-
英语谚语分享系列Word下载.docx
-
人教版高中化学选修5教案Word格式文档下载.docx
-
上海对外贸易大学翻译硕士英语考研真题Word格式文档下载.docx
-
人教版九年级上册政治复习提纲15课完整版本Word文件下载.docx
-
婴儿背带的人性化设计与研究Word文档格式.docx
-
英语Word文档下载推荐.docx
-
尚有缺额的院校专业宁夏教育考试院Word格式文档下载.docx
-
人教版五年级上册数学教案文档格式.docx
-
设备检修管理制度文档格式.docx
-
英语贵州省黔南州届高三上学期三校联考Word文件下载.docx
-
社区务虚会发言稿Word下载.docx
-
应用文写作课程总结Word文档下载推荐.docx
-
深圳市文化创意产业鼓励分离发展创意设计企业核心技术研发公共技术服务平台资助专项详解Word文档格式.docx
