 激光脉冲测距实验报告Word格式.docx
激光脉冲测距实验报告Word格式.docx
- 文档编号:19447383
- 上传时间:2023-01-06
- 格式:DOCX
- 页数:8
- 大小:167.87KB
激光脉冲测距实验报告Word格式.docx
《激光脉冲测距实验报告Word格式.docx》由会员分享,可在线阅读,更多相关《激光脉冲测距实验报告Word格式.docx(8页珍藏版)》请在冰豆网上搜索。
⊿R=C⊿t/2(2-2)
实际脉冲激光测距机中是利用时钟晶体振荡器和脉冲计数器来测定时间间隔
t的。
时钟晶体振荡器用于产生固定的频率的电脉冲振荡,脉冲计数器的作用是对晶体产生的电脉冲个数进行计数。
设晶体振荡器产生的电脉冲频率为f,则脉冲间隔T=1/f。
若从激光脉冲发出时刻脉冲计数器开始计数,到光脉冲被接收时刻停止计数。
设这段时间脉冲计数器共计得脉冲个数为m,则可计算出被测光纤的长度为
R=cmT=cm/f=1.6m
(2-3)
相应的测距精度为
⊿R=Ct=c/f
(2-4)
可见,脉冲激光测距机的测距精度由晶振的频率决定。
常用军用激光测距仪的晶振频率有15MHz、30MHz、75MHz和150MHz等,与其相对应的测距精度分别为正负10m、正负5m
、正负2m和正负1m。
晶振的频率愈高,测距精度就愈高,
但随之而来的,不仅是计数器的技术难度增加,而且要求激光脉冲的宽度愈窄,激光器的难度也增加。
对脉冲测距系统,计数器的“开门”信号是由取出一小部分发射激光脉冲经光探测器转换成电信号形成的。
这两个信号既可由同一探测器提供,也可以用两个探测器提供。
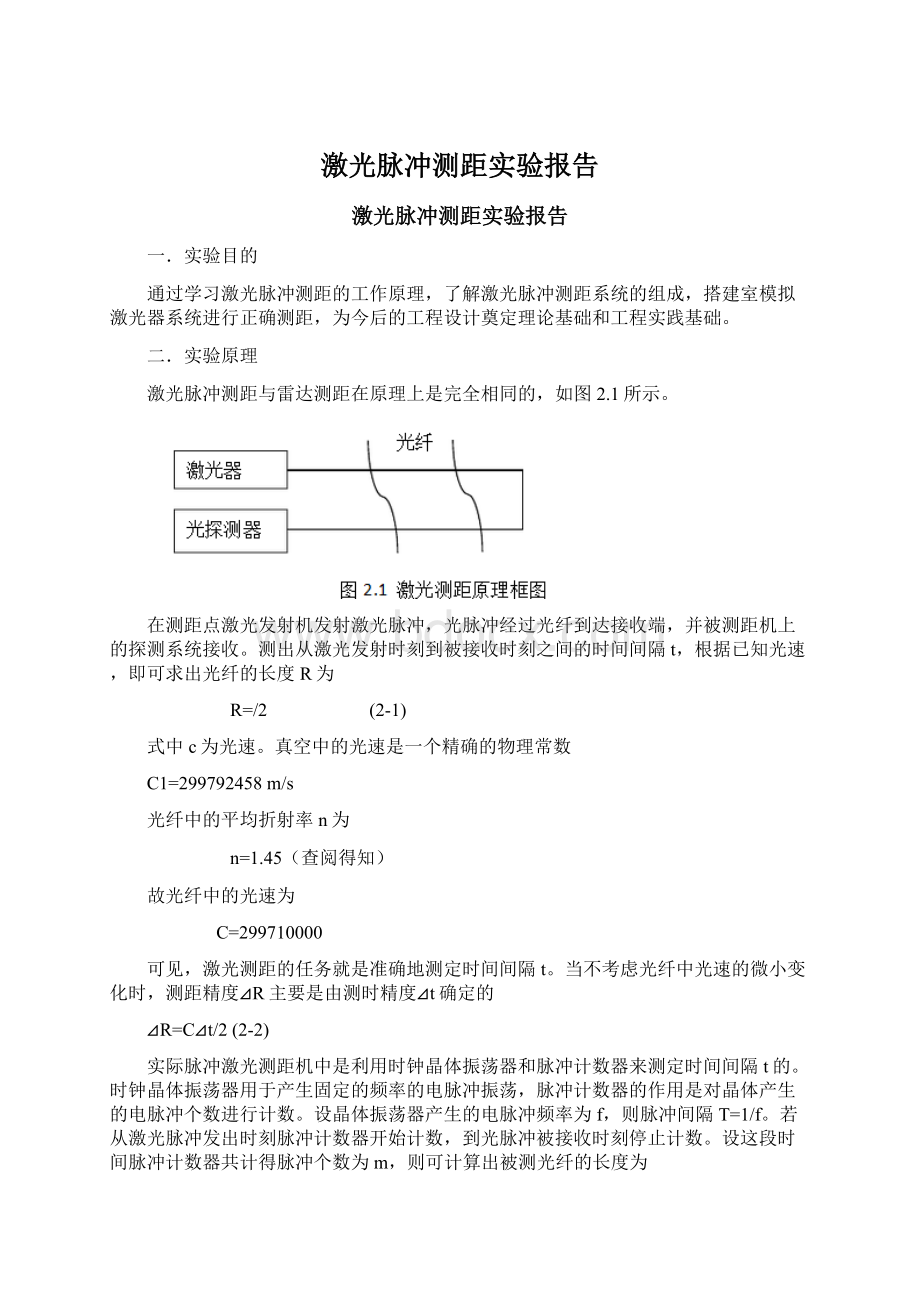
激光脉冲测距机由激光器、发射光学系统、接收及瞄准光学系统、取样及回波探测放大系统、技数及显示器和电源几部分组成,如图2.2所示
系统操作人员一旦下达发射激光命令,激光器发射一束窄激光脉冲,经发射光学系统扩束后射向接收系统,其中一小部分经取样后启动计数器开始计数。
激光回波经测距机的接收和瞄准光学系统,聚焦到前面有窄带滤光片的光探测器上。
由探测器将其转换成电信号,再经取样及回波探测放大系统处理后产生“关门”信号用于关闭计数器。
由计数器计得的脉冲个数计算出光纤得电源
计数及显示器激光器
长度,再通过显示器显示出来。
三.实验装置
实验装置包括“激光脉冲发射/接收电路板”、电脑和“单片机开放板”。
1.激光脉冲发射/接收电路板组成及工作原理
激光脉冲发射/接收电路板原理框图如图2.3所示。
图中EMP
3032为CPLD;
MAX3656为激光驱动器;
MAX3747为限幅放大器;
T22为单端信号到分差信号转换芯片;
T23为差分信号单短信号转换芯片;
LD为半导体激光器;
PD为光探测器。
板子上端的EMP3032被编程为脉冲发生器,输出重复频率为1KHz,脉冲宽度为48ns的电脉冲信号。
此信号经MAX3656放大后驱动LD发光。
板子下端的EMP
3032被编程为计数器,对125MHz晶振计数器。
其计数的开门信号来自上端的TX信号,关门信号来自PD的输出。
计数器的计数结果采用12位二进制数据输出,对应时间围为0~32.76us.
图2.3
发射/接收模块原理框图
发射/接收模块布局如图2.4所示,TX、RX1、RX2为三个Q9插座。
其中,LD的
驱动信号由TX口输出;
PD接收到的信号由RX输出。
2.接口管脚说明
插座J9为计数结果输出管脚,包括12位数据管脚和1位计数指示管脚:
•
数据管脚的高八位(从第12到5位)分别对应J9
的1、3、5、7、9、11、13、15;
数据管脚的低四位(从第4到11位)分别对应J9的16、14、12、10。
高电平为1,低电平为0;
计数指示管脚为J9的第六位。
计数指示为1表示
正在计数,0表示计数结束。
四.实验结果及程序:
#include<
reg52.h>
#defineucharunsignedchar
#defineuintunsignedint
ucharcode
SEG7[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x6f,0x00};
//数码管的段选,1为亮,0为灭
ucharSAV[6]={0xa0,0xa0,0xa0,0xa0,0xa0,0xa0};
ucharcodeACT[6]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf};
//数码管位选
voiddisplay();
voiddelay(uchar);
voidcount(uint);
uintget_Data();
voidmain()
{
uintre_data=get_Data();
count(get_Data());
while
(1)
{
display();
}
}
voiddelay(uchartime)//延时函数,延时时长等于time*机器周期
while(time>
0)
time--;
voidcount(uintcon_data)
SAV[0]=con_data%10;
//取数据的个位
SAV[1]=con_data/10%10;
//取数据的十位
SAV[2]=con_data/100%10;
//取数据的百位
SAV[3]=con_data/100/10%10;
//取数据的千位
voiddisplay()//数码管显示函数
uchari=0;
for(i=0;
i<
4;
i++)
if(i==1)
{
P0=SEG7[SAV[i]]|0x80;
//与0x80相“或”,点亮小数点
P2=ACT[i];
//数码管位选
}
else
P0=SEG7[SAV[i]];
delay(200);
//视觉暂留效应
P0=0xff;
uintget_Data()
uintlast_data;
uchardata;
P3=0xff;
//P3口置高,读取数据的需要
data=P3;
//读取P3口数据
last_data=data&
0xf0;
//与0xf0相“与”,获取P3口数据的高四位
last_data=last_data<
<
//数据左移4为,数据成为xxxx0000,因为读入的是高四位
P1=0xff;
data=P1;
//读取低4位
last_data=last_data+data;
returnlast_data*。
。
;
//last_data*1.6*10,由公式R=cm/fn可知,其中c为光速3*10^8米每秒,
//n为玻璃的折射率1.5,f为激光测距模块的晶振,为125兆赫兹,m为脉冲计数器计得的脉冲个数,即last_data,由于小数点加在了数据的个位和十位之间,故需倍乘以10
附实验结果图:
五.附加功能
附加程序:
60秒倒计时(从60-0倒计时)
ucharcodeSEG[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
ucharj=3,i;
voiddelay(uint);
TMOD=0X01;
ET0=1;
TR0=1;
EA=1;
TH0=(65535-50000)/256;
TL0=(65535-50000)%256;
if(j<
1)
j=60;
if(i==20)
i=0;
j--;
voiddelay(uintb)
{
uintc=110;
for(b;
b>
0;
b--)
for(c;
c>
c--);
voiddisplay()
P0=SEG[j%10];
P2=0xfe;
delay(100);
P0=SEG[j/10%10];
P2=0xfd;
P0=0x00;
voidtimer0()interrupt1
i++;
六、思考题:
1.激光脉冲测距的精度与哪些因素有关?
答:
晶振的频率,被测距离的远近,电路延时的长短,计数器阈值的电平调整误差,时基误差等。
2.如何提高激光脉冲测距的精度?
提高晶振频率,缩短电路延时。
3.激光光源的选择要考虑哪些方面?
被测物的状态,被测物表面光亮情况,反射率情况,被测物的温度(如果是高温的,表面是否会有像发红钢板的情况),这些直接关系到光源的选择。
七.实验总结与建议
通过这一次实验,我们了解了单片机的基本原理,掌握了单片机的使用技巧和相关软件的应用,复习并更深入掌握了编程,最后得以取得良好的结果更得益于全体成员的努力和配合,这为以后的几次的实验都打好了良好的基础,最后一个小小的建议是希望老师对实验原理和单片机方面多进行一些深入的讲解。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 激光 脉冲 测距 实验 报告
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
培训个人工作总结三篇.docx
-
配套K12冀教版二年级下册全册美术教案.docx
-
濮阳质量技术监督检验测试中心.docx
-
桥梁施工作业指导书.docx
-
普通高等学校招生全国统一考试大纲.docx
-
清风纸巾营销策划书.docx
-
七颗钻石.docx
-
全国高中学生化学竞赛试题及参考答案.docx
-
企业文化建设推进的难点及对策.docx
-
汽车修理项目可行性研究报告.docx
-
浅谈《古小说钩沉》中的民间禁忌.docx
-
强烈推荐小学三年级语文下册复习计划备课教案苏教版.docx
-
青岛版五年制小学二年级下册数学教案.docx
-
秋期中考.docx
-
交通安全预防措施.docx
-
教科版小学品德与社会五年级下全册教案.docx
-
教师社会实践心得体会.docx
-
练字标准田字格模板打印课件资料.docx
-
岭南版小学三年级美术上册教案全册.docx
