 neu控制系统仿真CAD作业Word文档下载推荐.docx
neu控制系统仿真CAD作业Word文档下载推荐.docx
- 文档编号:19243996
- 上传时间:2023-01-04
- 格式:DOCX
- 页数:24
- 大小:164.03KB
neu控制系统仿真CAD作业Word文档下载推荐.docx
《neu控制系统仿真CAD作业Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《neu控制系统仿真CAD作业Word文档下载推荐.docx(24页珍藏版)》请在冰豆网上搜索。
x=
1.0000
0
f_opt=
-1
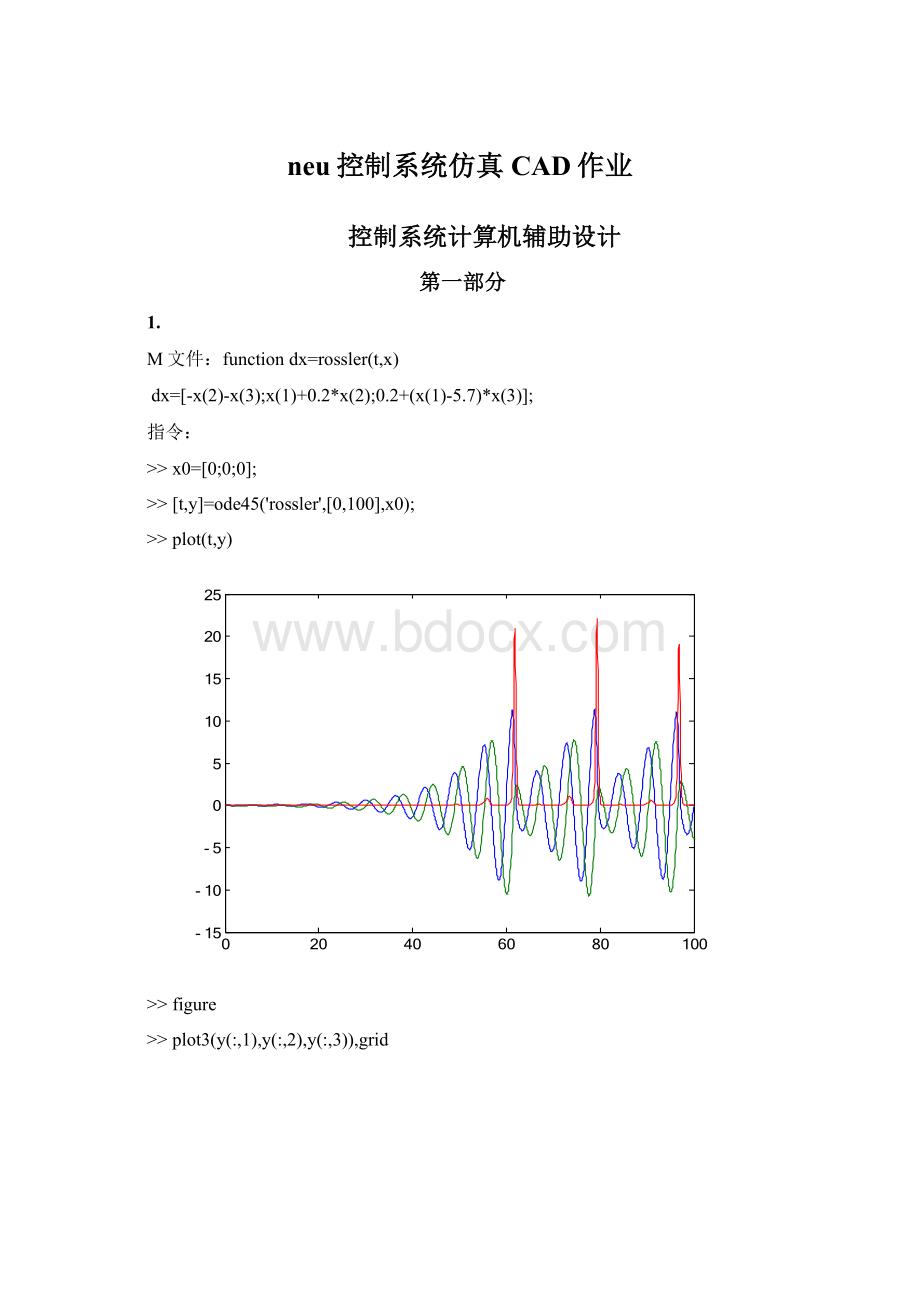
3.
(a)
s=tf('
s'
);
G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5))
Transferfunction:
s^3+4s+2
------------------------------------------------------
s^11+5s^9+9s^7+2s^6+12s^5+4s^4+12s^3
(b)
z=tf('
z'
0.1);
H=(z^2+0.568)/(z-1)/(z^2-0.2*z+0.99)
z^2+0.568
-----------------------------
z^3-1.2z^2+1.19z-0.99
Samplingtime:
0.1
4.手工运算整理得
令x1=y;
x2=dx1/dt;
x3=dx2/dt;
dx3/dt=2*u-5*x1-4*x2-13*x3;
A=[0,1,0;
0,0,1;
-5,-4,-13];
即可得出状态方程:
[dx1/dt;
dx2/dt;
dx3/dt]=A*[x1;
x2;
x3]+[0;
2];
将上述状态方程输入到MATLAB命令窗口;
调用tf(G),zpk(G)指令即可得出传递函数和零极点模型
A=[010;
001;
-5,-4,-13];
B=[0;
C=[100];
D=0;
G=ss(A,B,C,D)
a=
x1x2x3
x1010
x2001
x3-5-4-13
b=
u1
x10
x20
x32
c=
y1100
d=
y10
Continuous-timemodel.
tf(G)
2
----------------------
s^3+13s^2+4s+5
zpk(G)
Zero/pole/gain:
----------------------------------
(s+12.72)(s^2+0.2836s+0.3932)
当然可以由微分方程直接得出传递函数;
用拉普拉斯变换法可直接输入:
G=tf(2,[11345])
5.采用z变换方法;
设采样周期为1s
1);
G=(z+2)/(z^2+z+0.016)
z+2
---------------
z^2+z+0.016
1
6.
symsGJGcKpKis
G=(s+1)/(J*s^2+2*s+5);
Gc=(Kp*s+Ki)/s;
GG=feedback(G*Gc,1)
GG=
(s+1)*(Kp*s+Ki)/(J*s^3+2*s^2+5*s+Kp*s^2+s*Ki+Kp*s+Ki)
7.
G=tf([211.87,317.64],conv(conv([1,20],[1,94.34]),[1,0.1684]));
Gc=tf([169.6,400],[1,4,0]);
H=tf(1,[0.01,1]);
GG=feedback(G*Gc,H)
359.3s^3+3.732e004s^2+1.399e005s+127056
----------------------------------------------------------------------------------
0.01s^6+2.185s^5+142.1s^4+2444s^3+4.389e004s^2+1.399e005s+127056
zpk(GG)
35933.152(s+100)(s+2.358)(s+1.499)
--------------------------------------------------------------------------
0.02(s^2+3.667s+3.501)(s^2+11.73s+339.1)(s^2+203.1s+1.07e004)
(b)
z=tf('
G=(35786.7*z^-1+108444)/(z^-1+4)/(z^-1+20)/(z^-1+74.04);
Gc=1/(z^-1-1);
H=1/(0.5*z^-1-1);
-108444z^6+1.844e004z^5+1.789e004z^4
-------------------------------------------------------------------------
1.144e005z^6+2.876e004z^5+274.2z^4+782.4z^3+47.52z^2+0.5z
zpk(GG)
-0.94821z^4(z-0.5)(z+0.33)
-------------------------------------------------------------
z(z+0.3035)(z+0.04438)(z+0.01355)(z^2-0.11z+0.02396)
8.
g1=tf(1,[1,1]);
gc1=tf([1,0],[1,0,2]);
h1=tf([4,2],[1,2,1]);
G=feedback(g1*gc1,h1)
s^3+2s^2+s
--------------------------------------
s^5+3s^4+5s^3+11s^2+8s+2
g2=tf(1,[1,0,0]);
h2=50;
Gc=feedback(g2,h2)
--------
s^2+50
H=tf([1,0,2],[1,0,0,14]);
GG=3*feedback(G*Gc,H)
3s^6+6s^5+3s^4+42s^3+84s^2+42s
-----------------------------------------------------------------------------------------------------
s^10+3s^9+55s^8+175s^7+300s^6+1323s^5+2656s^4+3715s^3+7732s^2+5602s+1400
9.
num=conv(conv([1,1],[1,1]),[1,2,400]);
den=conv(conv(conv([1,5],[1,5]),[1,3,100]),[1,3,2500]);
G=tf(num,den);
step(G)
grid;
holdon;
G1=c2d(G,0.01);
step(G1)
G2=c2d(G,0.1);
step(G2)
G3=c2d(G,1);
step(G3)
10.(a)>
G=tf(1,[1,2,1,2]);
eig(G)
ans=-2.00000.0000+1.0000i0.0000-1.0000i
临界稳定
(b)>
G=tf(1,[6,3,2,1,1]);
ans=-0.4949+0.4356i-0.4949-0.4356i0.2449+0.5688i0.2449-0.5688i
不稳定
(c)>
G=tf(1,[4,1,-3,-1,2]);
ans=-0.8057+0.4664i-0.8057-0.4664i0.6807+0.3372i0.6807-0.3372i
11
(a)>
H=(-3*z+2)/(z^3-0.2*z^2-0.25*z+0.05);
abs(eig(H))
ans=0.50000.50000.2000
稳定
H=(3*z-0.39*z-0.09)/(z^4-1.7*z^3+1.04*z^2+0.268*z+0.024);
ans=
1.19391.19390.12980.1298
12.
A=[-0.2,0.5,0,0,0;
0,-0.5,1.6,0,0;
0,0,-14.3,85.8,0;
0,0,0,-33.3,100;
0,0,0,0,-10];
B=[000030]'
;
rank(ctrb(A,B))
ans=5完全可控
13
显然,这个自治的微分方程组的解析解为x(t)=x(0)*expm(A*t)
A=[-5200;
0-400;
-32-4-1;
-320-4];
x0=[1201]'
symsst;
x=expm(A*t)*x0
-3*exp(-5*t)+4*exp(-4*t)
2*exp(-4*t)
18*exp(-4*t)-18*exp(-5*t)-18*t*exp(-4*t)+4*t^2*exp(-4*t)
10*exp(-4*t)-9*exp(-5*t)-8*t*exp(-4*t)
由于符号运算不能图解,将x分成四个表达式,用离散化的t向量为为自变量,绘图
t=[0:
0.02:
x1=-3*exp(-5*t)+4*exp(-4*t);
x2=2*exp(-4*t);
x3=18*exp(-4*t)-18*exp(-5*t)-18*t.*exp(-4*t)+4*t.^2.*exp(-4*t);
x4=10*exp(-4*t)-9*exp(-5*t)-8*t.*exp(-4*t);
plot(t,x1,t,x2,t,x3,t,x4),grid
数值解法:
f=@(t,x)[-5200;
0-400;
-32-4-1;
-320-4]*x;
[t,y]=ode45(f,[0,2],[1201]'
可见,数值解与解析解很接近。
14.
G=tf(conv([1,6],[1,-6]),conv(conv(conv([1,0],[1,3]),[1,4-4*j]),[1,4+4*j]))
rlocus(G)
增益Gain从0~+无穷,在右半平面都存在不稳定极点,因此不论开环增益为多大,系统始终不稳定。
不妨当增益为1时,求闭环系统的特征根。
GG=feedback(G,1);
eig(GG)'
-3.9404-4.2387i-3.9404+4.2387i-3.43230.3132(右半平面的极点,不稳定)
G=tf([1,2,2],[1,1,14,8]);
rlocus(G)
从根轨迹可以看出,所有根轨迹均在s左半平面,因此无论增益为多大,闭环系统始终稳定
15.
>
G=(s-1)/(s+1)^5;
G.ioDelay=2;
G=pademod(G,1,2);
rlocus(G)为了方便看清晰临界稳定增益,此处截取了部分根轨迹,从图中可见,当增益Gain<
1时,闭环系统稳定
16.(a)>
G=8*(s+1)/s^2/(s+15)/(s^2+6*s+10);
nyquist(G)
bode(G),grid;
[gm,pm,wg,wp]=margin(G)
gm=30.4686pm=4.2340wg=1.5811Wp=0.2336
nichols(G)以下是局部Nichols图,上面反映了相位裕度和幅值裕度
相位裕量和幅值裕量均大于零,因此单位反馈构成的闭环系统稳定
step(feedback(G,1))
H=0.45*(z+1.31)*(z+0.45)*(z-0.957)/z/(z-1)/(z-0.368)/(z-0.99);
nyquist(H)
bode(H),gridon
[gm,pm,wg,wp]=margin(H)
Warning:
Theclosed-loopsystemisunstable.
gm=0.5434pm=-26.6555wg=0.8620wp=1.1975
相位裕量小于零,因此单位反馈构成的闭环系统不稳定。
step(feedback(H,1))
17
G=100*tf([1/2.5,1],conv([1/0.5,1,0],[1/50,1]));
Gc=1000*tf(conv([1,1],[1,2.5]),conv([1,0.5],[1,50]));
nichols(G*Gc)
gm=Infpm=63.2953wg=Infwp=18.8688
由以上图形和数据,可判断出单位负反馈系统稳定
以下是单位阶跃响应:
GG=feedback(G*Gc,1);
step(GG)
第二部分
sim('
simu2'
100),plot(tout,yout)
f=@(t,y)[y
(2);
y(3);
y(4);
-2*y
(1)-4*y
(2)-63*y(3)-5*y(4)+exp(-3*t)+exp(-5*t)*sin(4*t+pi/3)];
[t,y]=ode45(f,[0,100],[10.50.50.2]'
plot(t,y(:
1))
3
Simulink仿真模型
plot(tout,yout)
4换成一阶微分方程组的形式如下:
dx1/dt=t*sin(x2*exp(-2.3*x4));
dx2/dt=x1;
dx3/dt=sin(x2*exp(-2.3*x4);
dx4/dt=x3;
5系统仿真模型
[A,B,C,D]=linmod('
test5'
G=ss(A,B,C,D);
subplot(221),step(G),grid,subplot(222),bode(G),grid,subplot(223),nyquist(G),grid,subplot(224),nichols(G),grid
阶跃响应与频率响应曲线如下:
6
G=210*tf([11.5],conv(conv([11.75],[116]),conv([11.5+3*j],[11.5-3*j])));
[gm,gp,wm,wp]=margin(G)
gm=4.8921gp=60.0634wm=7.9490wp=3.9199
step(GG)
[gm1,gp1,wm1,wp1]=margin(GG)
Inwarningat26
Inlti.marginat67
gm1=Infgp1=-43.3034wm1=NaNwp1=24.6059
A=[0100;
0010;
-3123;
2100];
B=[1234;
0123]'
Q=diag([1234]);
R=eye
(2);
[K,S]=lqr(A,B,Q,R)
K=
-0.09781.21181.87670.7871
-3.8819-0.46682.67131.0320
S=
5.44000.6152-2.31630.0452
0.61521.8354-0.0138-0.7582
-2.3163-0.01381.9214-0.3859
0.0452-0.7582-0.38590.8540
eig(A-B*K)
-12.2563
-1.6786+0.9981i
-1.6786-0.9981i
-1.4627
G=ss(A-B*K,B,eye(4),0);
step(G)
8
A=[-0.20.5000;
0-0.51.600;
00-14.385.80;
000-33.3100;
0000-10];
B=[000030]'
C=[10000];
D=0;
P=[-1-2-3-4-5];
K=acker(A,B,P)
0.00040.0004-0.00350.3946-1.4433
-5.0000
-4.0000
-3.0000
-2.0000
-1.0000
step(ss(A-B*K,B,C,D),10)
p1=[-10-20-15-12-13]'
L=place(A'
C'
p1)'
[Gc,H]=obsvsf(G,K,L);
step(feedback(Gc*G,H))
grid
functiony=optfun_8(x)
assignin('
base'
'
Kp'
x
(1));
Ki'
x
(2));
Kd'
x(3));
[t_time,x_state,y_out]=sim('
opt1'
[0,21.000000]);
y=y_out(end);
ctrl_pars=
0.7922
0.9595
0.6557


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- neu 控制系统 仿真 CAD 作业
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
卫生学各章重点浙大.docx
-
杭州市建筑工程消防监督审核管理办法.docx
-
考点32水的电离和溶液的PH.docx
-
技术单位工作总结.docx
-
汽车油箱液位测量.docx
-
全国食品药品检验机构基础数据统计工作方案中国食品药品检定研究院.docx
-
天干地支详细解说.docx
-
门面租房协议书模板9篇.docx
-
师德师风建设学习计划.docx
-
一年级道德与法治下册第三单元教案.docx
-
食品质量管理题库.docx
-
人教版七年级下册道德与法治教案全册.docx
-
施工设备管理制度1.docx
-
香洲区中小学健康教育知识竞赛小学组题库概要1讲解.docx
-
国庆节现代诗歌朗诵稿5篇.docx
-
精品六年级下册英语Unit 6 An interesting country测试题 译林版三起含答案.docx
-
商品进销存管理程序课程设计论文.docx
-
天津市十二区县重点学校高三毕业班联考二英语试题.docx
-
文化生活基础知识修订.docx
