 详解PELCOPD协议软件编程篇文档格式.docx
详解PELCOPD协议软件编程篇文档格式.docx
- 文档编号:19230350
- 上传时间:2023-01-04
- 格式:DOCX
- 页数:10
- 大小:23.62KB
详解PELCOPD协议软件编程篇文档格式.docx
《详解PELCOPD协议软件编程篇文档格式.docx》由会员分享,可在线阅读,更多相关《详解PELCOPD协议软件编程篇文档格式.docx(10页珍藏版)》请在冰豆网上搜索。
位置在软件里随便增加的。
这里还注意一个位置是0开始,这也是为什么我们常说P协议位置主控要减1。
有的技术人写的软件老老实实的按照PELCO-P文档的软件来定义,应当自己灵活一下,把位置码改到从1开始不就行了吗?
这样就不会在将来客户使用过程要加1或减1这么麻烦。
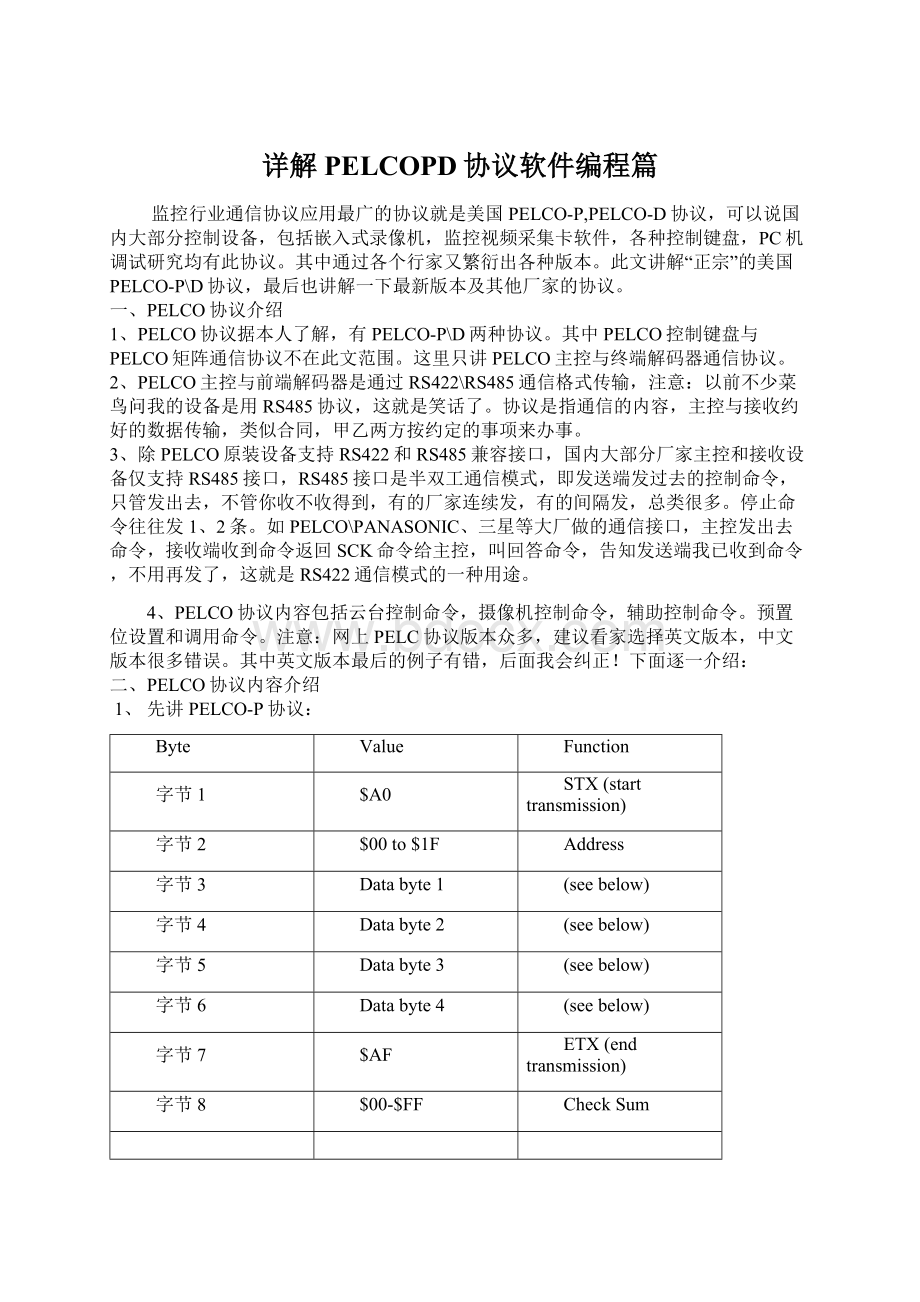
上表第3个字-第6个字节是:
看下表:
Bitnumber
7
6
5
4
3
2
1
CameraOn
AutoscanOn
Cameraon/off
IrisClose
IrisOpen
FocusNear
FocusFar
ZoomWide
ZoomTele
TiltDown
TiltUp
PanLeft
PanRight
0(forpan/tilt)
PanSpeed$00to$3Fand$40forTurbo
TiltSpeed$00to$3F
通过上表可知:
P协议内第3和第4个字节是摄像机协议和云台控制命令,第5和第6个字节是云台水平速度和垂直速度命令。
看上表,第3个字节内的第6位是摄像机电源开,5位:
可以定义云台自动扫描,4位:
摄像机屏蔽开与关;
3位:
光圈关;
2位:
光圈开;
1位:
聚焦近焦;
0位:
聚焦远焦。
举例:
打开光圈,那么此字节应当是04H十六进制,二进制就是00000100b。
P协议第4字节云台命令和变倍命令,看滴4字节data2里的8位都有:
7位是0无意义;
6位是变倍广角;
5位:
变倍远焦;
4位:
云台向下;
云台向上;
云台向左;
云台向右;
0:
可能是无意义。
这里没有明显云台自动命令,所以最早PELCO老大是不做云台自动转的命令在协议里。
之后国内厂家为了自动,就用调用多少号预置位命令去实现自动协议。
各个厂家的调用预置位或者是设置预置位号命令不同,这就是造成了今天各个厂家的云台解码器设置方法不一样。
这里很令工程商和菜鸟恼火!
有时候工程商操作的时候发现云台怎么是左右反了的?
这就是软件不匹配造成。
A厂家技术人喜欢这样定义右命令,B厂家技术人喜欢那样定义。
这就是协议之间的混乱,不严格按照PELCO老大的协议命令。
自己定义的命令使用者调试异常只能找厂家解决。
讲上面的第5个字节:
第5个字节是用在变速球机才有用的命令。
PELCO老大把水平速度定义成00-63个级,一共64级够用了。
第6个字节是垂直速度,和水平速度一样也是64个速度级。
这里讲速度级,问各位使用者,控制高速球的时候,您能感觉出高速球在以64个速度在不同变化吗?
不能!
控制高速球转动无非是用控制键盘的摇杆或者是点鼠标,点鼠标那个就不说了,麻烦的要死!
按遥控器?
海康的导航键要按的频率快,云台才转的快一些,但里面也只有几个速度级而已。
讲控制键盘控制高速球,大家知道,控制键盘的摇杆3维的里面是3个电位器,左右1个,上下1个,旋转1个控制变倍。
控制键盘摇杆内电位器由于精度问题,在键盘软件里一般是做6-12个速度级来控制高速球。
高速球软件里也要做6-12个速度表。
这样我感觉是最理想,当键盘摇杆出现偏移量,键盘发码给高速球。
可想一下,键盘摇杆向右45°
就到头了。
说这么多,64个速度级是没有用的,但是在高速球内,开发者最好都做进去,因为你不知键盘发过来的是哪个速度。
也可以用判断法,把64分成6-12个范围来接收控制。
我强烈建议使用者,购买监控设备,控制端和前端最好使用1个厂家的设备。
这样能省很多事情。
再回到第一个表看P协议的第7个字节是AFH,这个是结束字节标志。
第8个字节是校验字节。
最后再讲校验。
下面讲PELCO协议特殊命令:
看表格:
常用的命令我用红色表示。
第3字节第4字节
第5字节
第6字节
Command
Databyte1
Databyte2
Databyte3
SetPresetXX
00
03
常用
01toFF
ClearPresetXX
05
GoToPresetXX
07
Flip(rotate180o)
21
ZeroPanPosition
22
SetAuxXX
09
01to08
ClearAuxXX
0B
常用
RemoteReset
0F
不常用
ZoneStart
11
ZoneEnd
13
Writechartoscreen
15
0to28
0to7F
ClearScreen
17
AlarmAck
19
ZoneScanOn
1B
ZoneScanOff
1D
PatternStart
1F
PatternStop
21
RunPattern
23
ZoomLensSpeed
25
00to03
FocusLensSpeed
27
上表主要用到的是预置位设置与调用和清除,在高速球里还有flip自动翻转,还有控制室外解码器的雨刷开关AUX命令打开与关闭。
第4字节设置预置位是03H,调用预置位是07H,清除预置位是05H。
打开雨刷继电器是09H,关闭雨刷是0BH。
上面第6字节是预置位的设置和调用范围可以是01-255个。
自己也可以定义1024个或者64个。
后面有范围的数字都可以自己定义。
但是第4字节不要自己定义,否则会乱的。
特殊命令,存在第4个字节里:
PresetNumber
Function
99
BeginAuto-scan
启动云台自动扫描
98
BeginFrameScan
摄像机帧扫描不常用
97
BeginRandomScan
96
StopScan
停止所有功能
95
EnterMenuMode
打开摄像机和球机菜单
94
RemoteReset
云台或摄像机复位
93
SetRightLimitStop设置右限位
92
SetLeftLimitStop
设置左限位
34
Home(returnto0panposition)
归零自检
33
Flip
自动翻转
这些命令可以自己定义,但在解码器球机说明书里要有详细的说明,否则操整理也不会用的。
有的控制设备只有1-64号预置位就无法实现上述命令,所有有些厂家做在64范围内就是这个原因,一般是做兼容。
三、举例说明PELCO-P协议各个命令字节帧
1、1帧也叫1串命令,指主控设备发出1串命令叫1帧,包含8个字节。
波特率是1200-9600bit/s
例子如下:
PEOCO-P
协议
位置1号:
雨刷命令
AUX1-ON:
A00100090001AF06
OFF:
A001000B0001AF04
AUX2-ON:
A00100090002AF05
A001000B0002AF07
AUX3-ON:
A00100090003AF04
A001000B0003AF06
AUX4-ON:
A00100090004AF03
OFF:
A001000B0004AF01
11号位置:
位置是0B
AUX1-ON:
A00B00090001AF0C
A00B000B0001AF0E
摄像机命令,位置1号:
close:
A00108000000AF06
停止:
A00100000000AF0E
open:
A00104000000AF0A
A00100000000AF0E
near:
A00102000000AF0C
far:
A00101000000AF0F
停止:
tele:
A00100200000AF2E
wide:
A00100400000AF4E
up:
A00100080001AF07
down:
A00100100001AF1F
left:
A00100040100AF0B
right:
A00100020100AF0D
preset#1:
A00100030001AF0C
设1号预置位
call#1:
A00100070001AF08
调1号预置位
menu
:
A0010003005FAF52
打开菜单
tour:
预置位巡航,调76号预置位,字节定义的76:
A0010007004CAF45
A00100070060AF69
scan:
两点扫描或者水平扫描,字节定义99号预置位,16进制是63:
A00100070063AF6A
补充:
关于校验位:
下面这句是PELCO-P协议英文资料最后一句话。
P协议校验位是字节2-6的异或,应当是22而不是17。
在我上面的例子里,校验位是从第1字节到第7字节的异或,如:
A0010003005FAF52
A0
0100030020AF17(thelastbyteistheXORsumofbytes2through6)
四、PELCO-D协议内容介绍:
D协议字节数:
7个
Word1
Word2
Word3
Word4
Word5
Word6
Word7
SynchByte
Command1
Command2
Data1
Data2
1字节:
头字节
永远是FF
;
2字节:
位置字节,01-256,从1开始;
3、4字节:
云台和摄像机控制字节,5、6字节:
云台水平和垂直速度级字节;
7字节:
校验字节,是第2到第6字节的或OR。
速度级D协议是从00-63个级。
云台和摄像机字节控制位命令如下表:
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
Command1
第3字节
Sense
Reserved
Auto/ManualScan
CameraOn/Off
Command2
第4字节
Down
Up
Left
Right
Always0
举例:
关闭摄像机光圈命令,位置01,D协议命令是:
FF010400000005;
看上表,光圈关闭在第3字节的第2位,则为00000100二进制,16进制则是04H。
第4字节的控制命令如上。
关于云台自动功能如何实现,云台的自动功能是做到解码板电路,有多种硬件电路方法,也有软件检测限位开关或者光耦中断来控制左和右自动扫描。
但上面协议表是没有自动命令,在P协议里AUTO
PAN命令是CALL99号预置位。
在D协议里是没有定义,编程者可以定义CALL#NO来实现。
D协议特殊命令控制表:
第3字节
第4字节
第6字节
SetPreset
03
00常用
01to20
ClearPreset
05
GoToPreset
07
Flip(180°
about)
GoToZeroPan
SetAuxiliary
09
ClearAuxiliary
0B
0F
SetZoneStart
11
00不常用
SetZoneEnd
13
WriteChar.ToScreen
15
XPosition00to28不常用
ASCIIValue
17
00不常用
AlarmAcknowledge
19
AlarmNo.
1B
1D
SetPatternStart
1F
SetPatternStop
23
SetZoomSpeed
25
SetFocusSpeed
27
上表第6字节的数值范围编程者可以随便定义范围。
D协议,位置1,命令串如下:
FF010400000005
FF010000000001
FF010200000003
FF010100000002
FF010080000081
FF010020000021
FF010040000041
FF010008002029
FF010010002031
FF010004200025
FF010002200023
FF010003000105
call#1
FF010007000109
FF010003005F63
FF010007004C54
FF010007006068
FF01000700636B
pgm:
FF010025000026自定义的
建议编程者在做控制串口软件时,每帧命令输出时间间隔最好定义200ms/帧。
以上P\D两种协议介绍完毕。
下面介绍一下异类协议,这些协议很少见的。
设计的一些别的因素,不全部贴出。
把常用的协议讲完,此贴最后再讲各种协议之间的软件编程。
国内一些厂家的协议都比较简单,就不谈了!
下面谈谈台湾利凌、深圳三立、成都科力、松下这四家的通信协议,举1、2个命令来解释。
1、利凌高速球协议
位置1命令:
变倍缩小:
0120
FF,变倍停止:
0100FF
变倍变大:
0110
云台向右:
010183(80-87为速度级)
调1号预置位:
410000
调2号预置位:
410100
调3号预置位:
410200
(位置要加40H)
设置2号预置位:
820364
以上为利凌高速球一些命令,其协议为3个字节,为我见过的协议命令最简单的,固定波特率9600bit/s。
第1字节:
位置,第2字节:
动作命令,第3字节:
也是动作命令。
停止命令统一为:
位置00FF
利凌协议的特殊点在预置位设置和调用这个位置的区别,另外一个就是发码的连续性。
如摄像机控制和云台控制位置都是和主控一一对应,而调用预置位的命令,位置要加40H,在软件里用1条add
a,#40h;
a为变量,即可。
而在设置预置位时,位置变量要加80H才可以。
另外一个利凌高速球接收命令是为连续接收,也就是说主控端要连续发命令过来,高速球才连续转。
通过测试,每帧命令间隔30ms最理想。
此时间可用定时器中断计算出来。
2、深圳三立视讯,其矩阵协议型号有450、550、650.其中450和550兼容,650增加了一些特殊命令。
三立视讯据说是一家中日合资企业,其协议为小日本定义,字节比较多,协议之啰嗦。
2004年经过研究,已经破解。
现在列几条命令出来讲讲。
其协议命令为ASCII,如云台水平向右命令用STXADXX;
GCF:
202136C:
2022XY0ETX来表示,转换成16进制命令即得是:
02414430313B4743463A323032313336433a3230323230303003,这里一共26个字节。
02是头字节,4144是标志字节,3031表示01位置,第17个字节是43表示右命令。
假如做三立


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 详解 PELCOPD 协议 软件 编程
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
危化品告知牌大全.docx
-
孝感市学年度高三年级二统语文试题.docx
-
深圳英联房地产项目前期策划工作内容模板.docx
-
学习总结阅读经典征文6篇.docx
-
北师大版七年级数学上册第二章有理数及其运算单元测试题含答案.docx
-
习题word版第十四章整式的乘法与因式分解.docx
-
商品砼的生产供应方案.docx
-
四级真题.docx
-
重庆一中届高三下期月考文科综合含答案.docx
-
病句成语答案.docx
-
改革开放40周年主题征文5篇.docx
-
c航空管理系统解读.docx
-
FDA工艺验证指南中文.docx
-
财务报表分析.docx
-
箱涵工程验收表格.docx
-
人教版春秋版七年级地理期末教学质量检测B卷.docx
-
苏轼《定风波》教案.docx
-
三姑三姑夫欢迎你们来到美国大体上讲你们从首都国际机场和.docx
-
县教育事业发展五年工作总结.docx
