 网络课设实验报告.docx
网络课设实验报告.docx
- 文档编号:19167730
- 上传时间:2023-04-24
- 格式:DOCX
- 页数:17
- 大小:405.15KB
网络课设实验报告.docx
《网络课设实验报告.docx》由会员分享,可在线阅读,更多相关《网络课设实验报告.docx(17页珍藏版)》请在冰豆网上搜索。
网络课设实验报告
网络课设实验报告
课设题目:
通过三维力控组态软件实现对搅拌罐的远程控制
姓名:
黎烈
学号:
06291128
班级:
电气0805
指导教师:
胡小刚
课设题目:
通过三维力控组态软件实现对搅拌罐的远程控制
一、设计目的和内容
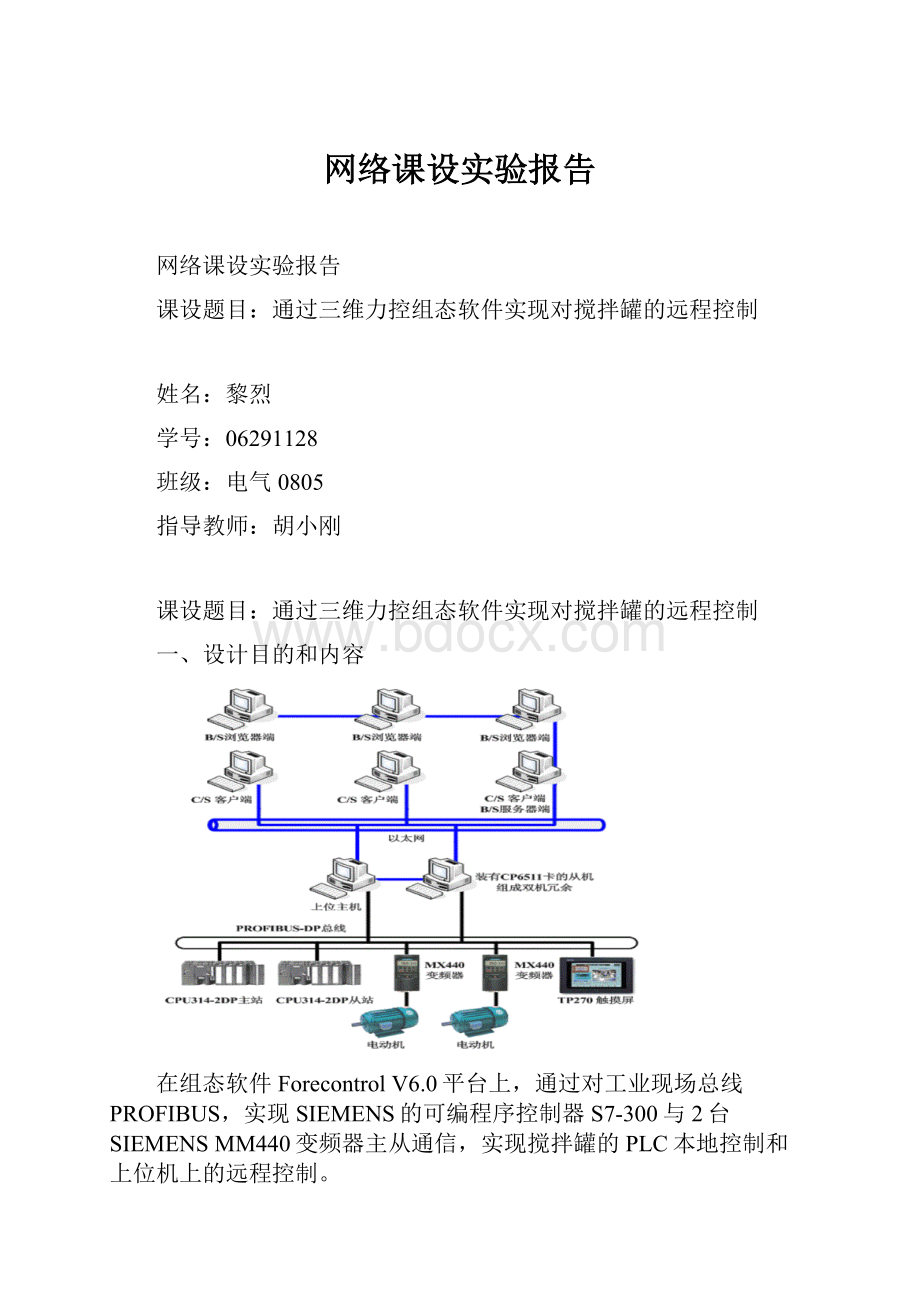
在组态软件ForecontrolV6.0平台上,通过对工业现场总线PROFIBUS,实现SIEMENS的可编程序控制器S7-300与2台SIEMENSMM440变频器主从通信,实现搅拌罐的PLC本地控制和上位机上的远程控制。
二、设计可用设备和器件
(1)所需设备:
①S7-300(CPU314C-2DP)1台
②计算机(1G内存,奔4-200M,40G硬盘)1台
③通信卡CP56111个
④变频器MM440两台
⑤三相异步电机两台
(2)所需软件:
①STEP7软件V5.3
②力控监控软件ForecontrolV6.0
(3)所需材料:
通信电缆、通信接口、通信电缆、工具、万用表等。
三、设计步骤与过程
熟悉被控模型
(1)S7-300CPU314C与两台变频器相联。
实现搅拌机控制系统功能为:
阀AQ124.0、阀BQ124.1为常开的电磁阀,搅拌机为三相异步电动机Q124.2,C为三相异步电动机控制的排料泵Q124.3。
启动按钮I0.0、停止按钮I0.1为不带锁的主令按键。
传感器HI0.2、传感器MI0.3、传感器LI0.4分别为低液位传感器、中液位传感器、高液位传感器。
它们的动作顺序为:
①按启动后,阀A开,A液体进入罐内。
当液位到M时,阀A关;
②阀B开,B液体进入罐内。
当液位到H时,阀B关;
③搅拌机开,搅拌A、B混合液体。
搅拌20秒后,搅拌机关;
④阀C开,排搅拌好的液体;
⑤当液位到H时,延时5秒后,阀C关。
循环执行以上过程。
(2)本设计中实际用到的相对应的PLC的I/O表为
本地开关按钮
I0.0
本地复位按钮
I0.1
液位传感器L
I0.2
液位传感器M
I0.3
液位传感器H
I0.4
远程控制/本地控制
I0.5
用电机1模拟搅拌机,搅拌转速由变频器1控制。
电机2模拟电磁阀C的排量,排量的大小由变频器2控制,设计通讯程序状态变量连接表。
设计步骤
(1)根据题目要求,利用力控6.0软件画图,在图库中选择相应的罐体、搅拌器、阀门、指示灯和传感器以及弯曲管道,并用基本元件中的垂直/水平线画出立体管道,用文本写出相应的字符,最终完成监控画面的设计与组态。
(2)建立上位监控系统的变量表(数据库变量、中间变量、间接变量)。
特别是在数据库中划分区域设定与控制参量相对应的模拟I/O点、数字I/O点。
其中除了LEVEL为模拟I/O点,其他变量都为数字I/O点。
(3)建立力控组态软件与S7300PLC之间的通讯。
上位机与S7300PLC之间的通讯采用SIEMENS的MPI通信方式。
在力控6.0的开发系统中,通过“I/O设备驱动”在PLC里选择SIEMENSS7-300/400(MPI)建立组态软件与PLC的软件接口。
并建立相应的连接(组态软件变量与PLC硬件地址之间的映射关系)。
(4)配置完成后,力控组态软件里面添加变量以及做相应的动作连接、监控画面的相关调试。
罐子的相关变量是LEVEL.PV,搅拌器的相关变量是MIXER.PV,ABC三个阀门的相关变量分别为INPUT_A.PV、INPUT_B.PV和OUT_C.PV,系统指示灯的相关变量是RUN.PV,控制指示灯的相关变量是CONTROL.PV,低中高三个液位的相关变量分别为SENSOR_L.PV、SENSOR_M.PV和SENSOR_H.PV。
为了让立体管道能够出现流动的效果,在颜色相关动作中选择条件并加入变量,同时选择流动属性,调试即可得实验所需要的效果。
另外在启动和停止按钮中加入左键动作,可以在远程控制的时候控制系统的运行状态。
需要显示实时的液位量,所以可以加入一个文本用来显示数据的输入和输出,在文本中选择数据输入和数据输出的模拟选项来实现需要的效果。
还可以加入控件来实现显示实时时间,在工具箱里选择WINDOWS控件,再选择其中可以用来显示时间的控件即可。
最后是动作连接部分,需要在动作选项的应用程序动作中输入相应的BASIC程序语言,首先是进入程序部分,ON_YUAN.PV、OFF_YUAN.PV和CONTROL.PV都为0,选择每隔1000毫秒执行,另外在程序运行周期执行中输入一下程序:
IFSENSOR_L.PV&&RUN.PV==1&&LEVEL.PV<=27THEN
LEVEL.PV=LEVEL.PV+3;
ENDIF
IFSENSOR_M.PV&&RUN.PV==1&&LEVEL.PV<=57THEN
LEVEL.PV=LEVEL.PV+3;
ENDIF
IFSENSOR_H.PV&&RUN.PV==1&&LEVEL.PV<=87THEN
LEVEL.PV=LEVEL.PV+3;
ENDIF
IFSENSOR_H.PV==0&&RUN.PV==1&&LEVEL.PV>=63THEN
LEVEL.PV=LEVEL.PV-3;
ENDIF
IFSENSOR_M.PV==0&&RUN.PV==1&&LEVEL.PV>=33THEN
LEVEL.PV=LEVEL.PV-3;
ENDIF
IFSENSOR_L.PV==0&&RUN.PV==1&&LEVEL.PV>=3THEN
LEVEL.PV=LEVEL.PV-3;
ENDIF
IFSENSOR_M.PV&&RUN.PV==1THEN
LEVEL.PV=60;
ENDIF
IFSENSOR_H.PV&&RUN.PV==1THEN
LEVEL.PV=90;
ENDIF
IFSENSOR_L.PV==0&&RUN.PV==1THEN
LEVEL.PV=0;
这段程序的7到12行市用来实现部分液位逐渐上升和下降的程序部分,为了这一部分我花了不少的力气,最后是通过C语言和BASIC语言的类比来实现的,虽然还是比较简单,还需要以后通过对程序的进一步了解来做改进才能比较完全的实现逐渐上升和下降的功能。
(5)扩展部分
按老师的要求,实现了监控软件界面设计,能够远程控制和本地控制,另外我们又加入了用户管理界面和液面逐渐上升功能,可以实现登录以及修改密码等功能,并能在监控界面与用户管理界面之间切换。
此外我们还加入了趋势曲线用来显示液面的实时变化趋势,能以较为形象直观的曲线图表来实现对液位变化情况的实时监控。
另外还加入了搅拌计数功能,如下图:
4、调试部分以及所遇到的问题
完成了以上的设计,下面一布就差系统集成的联调了,按照下图通过对工业现场总线PROFIBUS,实现SIEMENS的可编程序控制器S7-300与2台SIEMENSMM440变频器主从通信,实现搅拌罐的PLC本地控制和上位机上的远程控制。
在实验室按照要求连接好设备,打开电源开关,同时打开PLC的控制开关,观察当指示灯中有两个绿色的亮的时候说明PLC可以正常工作,确保联调开始前各个控制开关处于关闭状态,如果有按键处于打开的状态的话可以按复位键。
打开力控6.0软件,进入运行界面,首先调试本地控制,打开本地开关按钮IO.0,此时监控画面中的系统指示灯没有变化,等待一会以后按下低液位传感器的开关,即模拟低液位状态,但是监控画面中的液位指示也没有发生变化,第一次调试失败,开始检查问题所在。
经过我们的检查,发现是由于I/O设备驱动设置中有些问题,第三步中的MPI地址(站号)应该是3而不是0。
改变这个I/O设备驱动设置之后,重新开始联调,按下复位开关后又关闭,运行监控软件,打开本地开关按钮IO.0,观察监控画面,发现系统指示灯由黄色变绿色,同时A阀门打开并开始向搅拌罐加入液体,画面如下:
模拟低液位情况,按下IO.3的低液位传感器控制开关,A阀门接着放液体,监控画面如下:
模拟中液位情况,再打开IO.4中液位传感器控制开关,此时A阀门停止放液体,B阀门打开放液体,监控画面如下:
模拟高液位情况,再打开IO.5高液位传感器控制开关,此时A阀门和B阀门都停止放液体,搅拌器开始转动,监控画面如下:
在搅拌20秒之后,搅拌器停止转动,C阀门打开开始放液体,监控画面如下:
模拟下降沿中液位,关闭IO.5高液位传感器控制开关,液面下降,监控画面如下:
接着模拟低液位,关闭IO.4中液位传感器控制开关,液面下降,监控画面如下:
接着关闭IO.3低液位传感器控制开关,液面下降,延时5秒之后C阀门也关闭。
以上是一个本地控制的搅拌罐工作过程。
然后是模拟远程控制过程,首先打开复位按钮接着又关闭,打开IO.6远程控制/本地控制调整开关,可以看到监控画面上远程控制指示灯变红而本地控制指示灯变白。
用鼠标打开启动开关,系统指示灯变绿,A阀门打开放入液体,再用低中高液位传感器控制开关分别模拟液面上升过程,中液位时A阀门关闭B阀门打开放入液体,高液位时候AB阀门都关闭搅拌器开始工作,20秒之后C阀门打开放出液体,再用高中低液位传感器控制开关分别模拟液面下降过程,在液面下降到低液位时候延时5秒后关闭C阀门。
远程控制的截图与本地控制的基本相同,所以也就不再重复了,截图如下:
按照老师实现液面逐渐变化的要求我们又对程序作了一定的改动,但开始的时候不是很顺利,只能实现逐渐上升的功能而且不能很好的控制,液面会一直上升并超过100,而这显然和实际情况不符合,所以我们又仔细研究了一下程序,做了进一步的改进,也经过了多次失败,最后终于能够成功实现液面逐渐上升和下降的功能,以下是用来实现此功能的程序语句:
IFSENSOR_L.PV&&RUN.PV==1&&LEVEL.PV<=27THEN
LEVEL.PV=LEVEL.PV+3;
ENDIF
IFSENSOR_M.PV&&RUN.PV==1&&LEVEL.PV<=57THEN
LEVEL.PV=LEVEL.PV+3;
ENDIF
IFSENSOR_H.PV&&RUN.PV==1&&LEVEL.PV<=87THEN
LEVEL.PV=LEVEL.PV+3;
ENDIF
IFSENSOR_H.PV==0&&RUN.PV==1&&LEVEL.PV>=63THEN
LEVEL.PV=LEVEL.PV-3;
ENDIF
IFSENSOR_M.PV==0&&RUN.PV==1&&LEVEL.PV>=33THEN
LEVEL.PV=LEVEL.PV-3;
ENDIF
IFSENSOR_L.PV==0&&RUN.PV==1&&LEVEL.PV>=3THEN
LEVEL.PV=LEVEL.PV-3;
ENDIF
由于逐渐过程在实验报告中无法得到完全体现,因此我们会在验收时候将此功能展示给老师看。
在前面的设计环节已经提到过作为设计的扩展内容,我们在监控软件中加入了用户管理界面,这个界面在联调中也能得到良好的功能实现。
此外,我们还对其他功能进行了扩展,实现了对搅拌器搅拌次数和液位变化趋势的实时监控,也就是搅拌计数和趋势曲线功能,调试截图分别如下:
对搅拌次数的计数是通过加入变量来完成的,我首先在监控系统的变量表中新建了一个名为TIMES的模拟I/O点,用来作为对搅拌次数计数的变量,另外在动作选项中选择条件动作,设定条件为SENSOR_H.PV==1,而动作为TIMES.PV=TIMES.PV+1,即可实现该计数功能。
5、设计以及调试的心得体会
首先,我个人觉得这次计算机网络课程设计还是很有意义而且挺有趣的,虽然本身我们还没有怎么接触工业自动化控制的系统集成技术以及电气控制PLC的概念,所谓PLC也就是可编程控制器,而这次课设也没有怎么真正涉及PLC方面的内容,但是我觉得通过这次课设自己对PLC的概念有了一定的认识,我想这对于以后的进一步的深入学习起到了一些指导意义和实践意义。
本次课设的内容实质也就是让我们做一个监控软件来监控一个搅拌控制器,用两个不同的电机来模拟搅拌器和电磁阀,而PLC中已经写入了相应的程序,我们所要做的也就是在这个基础上完成软件部分的设计,整个过程并不涉及PLC的知识,我们只需要在调试过程中需要掌握一些基本概念。
在整个课程设计的过程中,我基本掌握了Forcecontrol力控6.0软件的使用方法以及关于PLC的一些基础概念和知识,并且在调试过程中掌握和领会了一些调试的技巧以及注意事项。
当然在调试过程中,我们也遇到了许多困难,比如刚开始调试时无论怎么操作按钮监控画面都没有什么变化,还有监控画面与实际情况不太相符,但是通过组员的讨论、自己的思考还有老师、学长们的指导,并且很好地利用自己手边的资料,查阅了一些关于BASIC编程方面的内容,这些不仅在某种程度上拓展了自己的知识面,同时也提高了自己的编程水平和独立解决问题的能力。
这样,在原有软件的基础上,我们通过自己对软件以及编程知识的学习,做了一部分扩展,用户管理界面、趋势曲线和搅拌次数计数。
通过这次计算机网络技术课程设计,我对工业自动化控制的系统集成技术有了一定的了解。
但是在实验中仍然遇到了一些问题,通过仔细检查和研究,让我对系统集成中各部分的功能和及其特性有了更近一步的了解和认识,近一步加强了自己对待科学的严谨性。
总之,在这次实验设计过程中,我掌握了发现问题,分析问题,解决问题的技巧,并且提高了这方面的能力,这次课程设计使我获益匪浅,有些内容在下学期的课程中将涉及到,具有极大的工程实践意义。
虽然有时候一下子难以很快解决问题,但是通过对问题的认真思考和查阅书籍资料,使我能够茅塞顿开,思路开阔。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 网络 实验 报告
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《地质测量图绘制细则》.docx
《地质测量图绘制细则》.docx
-
《大学生健康教育教程》考试题库500题DR含答案.docx
-
《黄鹤楼送孟浩然之广陵》字词注释.docx
-
《葱爆羊肉》概要.docx
-
《面向对象程序设计》C++综合练习学生版.docx
-
《化学反应工程》课程综合复习资料.docx
-
《社会心理》网上形考参考答案.docx
-
《轮扣式支架》模板施工方案.docx
-
《团委新成员大会主持稿1》.docx
-
《三峡学典》思品七上.docx
-
《有效备课上课听课评课》读书笔记.docx
-
《土地的誓言》导学案.docx
-
1汽车维修专业人才需求调研报告.docx
-
《应用文写作》教学设计.docx
-
1级三相费控智能电能表技术规范.docx
-
17#楼机房层模板施工方案.docx
-
《稻草人》精彩读书笔记精选多篇doc.docx
-
《机械制造工艺与装备》复习资料.docx
-
《木兰从军》教案.docx
-
《神奇的毛细现象》.docx
-
《围城》读书心得精选范文1000字5篇.docx
-
《幼儿园是我家》大班教案.docx
-
1资产负债表变动情况的分析评价.docx
-
5s活动总结报告5s总结报告2篇.docx
-
《当代学生》初中文言文阅读训练篇.docx
-
《机械制造工艺学》电子教案.docx
-
《民事案件案由规定》物权纠纷案由的理解与适用.docx
-
《社会学研究方法学习心得5篇范文》.docx
-
《外商投资企业联合年检报告书》填写要求和指标说明.docx
-
《幼儿园课程论》形成性考核册答案27497.docx
-
1在直接影响物价水平的诸多因素当中.docx
-
10套普通话练习材料.docx
-
6焊接质量控制.docx
-
朝阳公共资源交易管理办法试行.docx
-
4522c1心电图各种检查项目的适应症和禁忌症.docx
-
大连中医医院全自动智能单剂量药品包装机采购项目.docx
-
北京市顺义区届高三第二次统练.docx
-
炒股口诀十节大全.docx
-
百货零售业行业研究报告.docx
-
4上海黄浦区八年级下学期期末物理试题.docx
-
2爱国会议记录.docx
-
版高三语文二轮复习第三部分古诗文阅读专题十古代诗歌阅读考点4思想内容与观点态度讲.docx
-
波动率交易实战策略.docx
-
Project中文版基础教程.docx
-
毕业实习总结3篇.docx
-
安徽省江淮十校届高三联考理科英语精校Word版含答案.docx
-
创新创业论文空间太阳能研究.docx
-
部编本四年级语文下册第八单元全套每课课后作业题及答案汇编含四套题.docx
-
XX服务员年终工作总结.docx
-
策划书的要求及格式.docx
-
传染病年终工作总结.docx
