 PLC课程设计坐标式机械手Word文档下载推荐.docx
PLC课程设计坐标式机械手Word文档下载推荐.docx
- 文档编号:19131954
- 上传时间:2023-01-04
- 格式:DOCX
- 页数:12
- 大小:153.96KB
PLC课程设计坐标式机械手Word文档下载推荐.docx
《PLC课程设计坐标式机械手Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《PLC课程设计坐标式机械手Word文档下载推荐.docx(12页珍藏版)》请在冰豆网上搜索。
(4)机械手的夹紧和放松动作均应有1s延时,然后上升;
机械手每到达一个位置均有0.5s的停顿延时,然后进行下一个动作。
(5)若机械手停止时不在原点位置,可通过手动开关分别控制机械手的上升和左移,使之回到原点。
(6)要求循环120次后自动停止工作并警铃报警
1.2I/O编址并画出工作框图
1.3编程并调试
1.4I/O端子接线图
第二章工艺过程
机械手的全部动作由气缸驱动,而气缸则由相应的电磁阀控制。
其中,上升/下降和左移/右移分别由双线圈二位电磁阀控制。
例如当下降电磁阀通电时,机械手下降;
当下降电磁阀断电时,机械手下降停止。
只有当上升电磁阀通电时,机械手才上升;
当上升电磁阀断电时,机械手上升停止。
同样,左移/右移分别由左移电磁阀和右移电磁阀控制。
机械手的放松夹紧由一个单线圈二位电磁阀(称为夹紧电磁阀)控制。
当该线圈通电时,机械手夹紧,该线圈断电时,机械手放松。
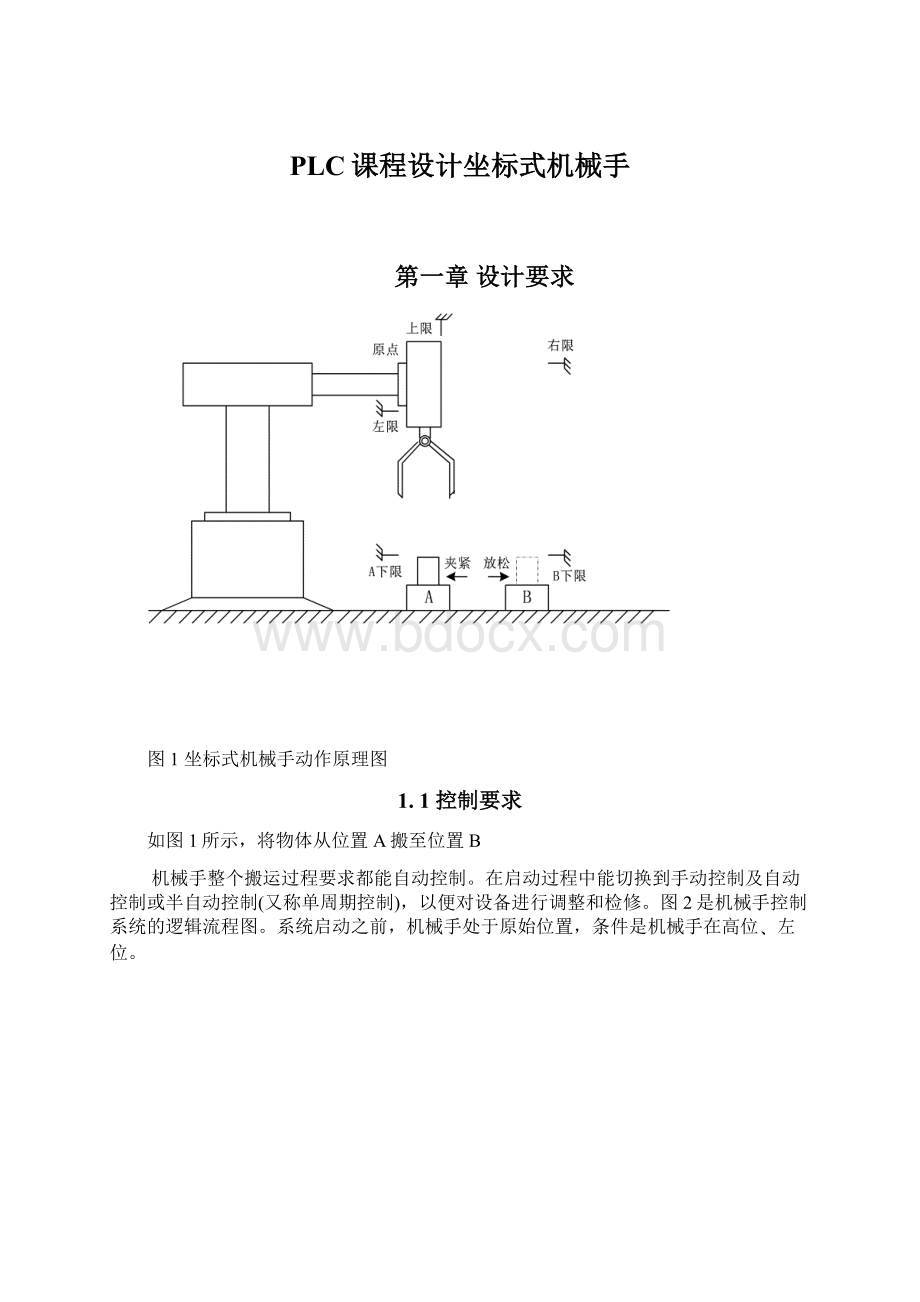
当机械手右移到位并准备下降时,为了确保安全,必须在右工作台上无工作时才允许机械手下降。
也就是说,若上一次搬运到右工作台上的工件尚未搬走时,机械手应自动停止下降。
机械手的动作过程分解图3所示。
从原点开始,按下起动按钮时,下降电磁阀通电,机械手下降。
下降到底时,碰到下限位开关,下降电磁阀断电,机械手下降停止;
同时接通夹紧电磁阀,机械手夹紧。
夹紧后,上升电磁阀通电,机械手上升。
上升到顶时,碰到上限位开关,上升电磁阀断电,上升停止;
同时接通右移电磁阀,机械手右移。
右移到位时,碰到右限位开关,右移电磁阀断电,机械手右移停止。
若此时工作台上无工件,则光电开关接通,下降电磁阀通电,机械手下降。
同时夹紧电磁阀断电;
机械手放松,放松后,上升电磁阀通电,机械手上升。
同时接通左移电磁阀,机械手左移。
左移到原点时,碰到左限位开关,左移电磁阀断电,左移停止。
至此,机械手经过8步动作完成了一个周期。
图3机械手动作过程分解图
机械手的操作方式分为手动操作方式和自动操作方式。
自动操作方式又分为步进、单周期和连续操作方式。
手动操作:
用按钮对机械手的每一步运动单独进行操作控制。
例如,当选择上下运动时,按下启动按钮,机械手下降;
按下停止按钮,机械手上升。
当选择左右运动时,上下启动按钮,机械手右移;
按下停止按钮,机械手左移。
当选择夹紧放松运动时,按下启动按钮,机械手夹紧;
按下停止按钮,机械手放松。
步进操作:
每按一次启动按钮,机械手完成一次动作后自动停止。
单周期操作:
机械手从原点开始,按一下启动按钮,机械手自动完成一个周期的动作后停止。
连续操作:
机械手从原点开始,按一下启动按钮,机械手的动作将自动的、连续不断的周期性循环。
在工作中若按一下停止按钮,则机械手将继续完成一个周期的动作后,回到原点自动停止。
第三章操作面板布置
根据控制要求,需安排一些操作开关,并设计控制箱面板布置图如图4
图4操作面板布置图
图4中,接通单操作方式。
按加载选择开关的位置,用启动∕停止按钮选择加载操作,当加载选择开关打到左∕右位置时,按下启动按钮,机械手右行;
若按下停止按钮,机械手左行。
上述操作可用于使机械手回到原点。
接通步进方式。
机械手在原点时,按下启动按钮,向前操作一步;
每按启动按钮一次,操作一次。
接通单周期操作方式。
机械手在原点时,按下启动按钮,自动操作一个周期。
接通连续操作方式。
机械手在原点时,按下启动按钮,连续执行自动周期操作,当按下停止按钮,机械手完成此周期后自动回到原点并不再动作。
第四章输入/输出端子地址分配
该机械手控制系统所采用的PLC是德国西门子公司生产的S7-200CPU224,图5是S7-200CPU224输入/输出端子地址分配图。
该机械手控制系统共使用了14个输入点,6个输出点。
图5机械手的输入/输出接线图
第五章程序规划及编制
为了在程序中安排机械手控制系统单操作、步进操作、自动操作等功能程序,规划程序整体结构如图6所示
图6机械手控制系统整体程序图
若选择单操作工作方式,I0.7断开,接着执行单操作程序。
单操作程序可以独立于自动操作程序,可另行设计。
在单周期工作方式下,可执行自动操作程序。
在步进工作方式下,执行步进操作程序,按一下按钮执行一个动作,并按规定顺序进行。
在需要自动操作方式时,中间继电器M1.0接通。
步进工作方式,单操作工作方式和自动操作方式,都用同样的输出继电器
第六章单操作工作的程序
如图7是实现单操作工作的梯形图程序
图7机械手单操作梯形图
为避免发生误动作,插入了一些连锁电路。
例如,将加载开关扳到“左右”档时,按下启动按钮,机械手右行;
按下停止按钮,机械手向左行。
这两个动作只有当机械手处在上限时才能执行。
将加载开关扳到“夹/松”档,按下启动按钮,执行夹紧动作;
按下停止按钮,松开。
将加载开关扳到“上/下”档,按下启动按钮,下降;
按停止按钮,上升。
第七章自动操作程序
如图8是机械手自动操作功能图,图9是与之对应的梯形图
图8自动操作顺序功能图
图9自动操作梯形图
PLC由STOP转为RUN时,初始脉冲SM0.1对状态进行初始复位。
当机械手在原点时,将状态继电器S0.0置1,这是第一步。
按下启动按钮后,置位状态继电器S0.1,同时将原工作状态继电器S0.0清零,输出继电器Q0.0得电,Q0.5复位,原点指示灯熄灭,执行下降动作。
当下降到底碰到下限位开关时,I0.1接通,将状态继电器S0.2置1,同时将状态继电器S0.1清零,输出继电器S0.0复位,Q0.2置1,于是机械手停止下降,执行夹紧动作;
定时器T37开始计时,延时1.7s后,接通T37动合触点将状态继电器S0.3置1,同时将状态继电器S0.2清零,而输出继电器Q0.1得电,执行上升动作。
由于Q0.2已经被置1,夹紧动作继续执行。
当上升到上限位时,I0.2接通,将状态继电器S0.4置1,同时将继电器S0.3清零,Q0.1失电,不再上升,而Q0.3得电,执行右行动作。
当右行至右限位时,I0.3接通,Q0.3失电,机械手右行停止,若此时I0.5接通,则将状态继电器S0.5置1,同时将状态继电器S0.4清零,而Q0.0再次得电,执行下降动作。
当下降到底碰到下限位开关时,I0.1接通,将状态继电器S0.6置1,同时将状态继电器S0.5清零,
输出继电器Q0.0复位,Q0.2置1,于是机械手停止下降,执行松开动作;
定时器T38开始计时,延时1.5s后,接通T38动合触点状态继电器S0.7置1,同时将状态继电器S0.6清零,而输出继电器Q0.1再次得电,执行上升动作。
行至上限位置,I0.2接通,将状态继电器S1.0置1,同时将状态继电器S0.7清零,Q0.1失电,停止上升而Q0.4得电,执行左行动作。
到达左限位,I0.4接通,将状态继电器S0.1清零。
如果此工作状态为连续工作状态,M1.0置1,即将状态继电器S0.1置1,重复执行自动程序。
若为单周期操作方式,状态继电器S0.0置1,则机械手停在原点。
在运行中,如按停止按钮,机械手的动作执行完当前一个周期后,回到原点自动停止。
在运行中,PLC掉电,机械手动作停止。
重新启动时,先用手动操作将机械手移回原点,再按启动按钮,便可重新开始自动操作。
步进动作是指按下启动按钮动作1次。
步进动作功能图与图7相似,只是每步动作都需按1次启动按钮。
步进操作所用的输出继电器,定时器与其他操作所用的输出继电器,定时器相同
第八章PLC外围端子接线图
图10PLC外围端子接线图
第九章总结
本课程设计是在肖清老师的精心指导和严格要求下完成的。
从在做设计以来,我不仅在专业上有了很大的进步,而且恩师的严谨治学态度、务实工作作风、高度的责任心,也使我受益非浅。
在此,我要向肖清老师表示深深的敬意和衷心的感谢!
在这三个星期的课程设计当中,第一个星期时收集课程设计的相关资料。
起初拿到这个题目时。
根本就不知如何下手,所有的资料都是从网上和书本上搜集的。
在程序调试及图形绘制中,遇到了不少的问题。
最后在同学和老师的帮助下,这些问题都得到了解决。
此外,作者在学习期间,还得到许多老师、同学、朋友的帮助,在此表示衷心的感谢!
三年里有许多让我感动的事和让我感激的人。
但由于时间的仓促和主客观条件的限制我们只是做出模型做演示,当然这与真正的实物相比,在工艺上还有很大差距,尽管有些不太完美的地方,但我们已经很努力了。
最后祝愿老师们工作顺利,身体健康!
祝愿同学们学业有成,一切顺利!
参考文献
[1]肖清、王忠锋.西门子PLC课程设计指导书.2009
[2]袁任光.编程序控制器应用技术与实例.广州.华南理工大学出版社.1997
[3]康华光.电子技术基础.高等教育出版社.2005
[4]王兆安等.电力电子技术.北京:
机械工业出版社,2003
[5]胡寿松等.自动控制原理.北京:
科学出版社,2004
[6]孙亮等.自动控制原理.北京:
北京工业大学出版社,2001
[7]吴浩烈.电机及电力拖动基础.重庆:
重庆大学出版社,2005
[8]顾绳谷.电机及拖动基础.北京:
机械工业出版社,2000
[9]邱阿瑞.电机与电力拖动.北京:
电子工业出版社,2002
[10]陈伯时等.电力拖动自动控制系统.北京:
机械工业出版社,2002
[11]陈伯时等.交流调速系统.北京:
机械工业出版社,2005
[12]郭东栋.单片机控制的直流调速系统可编程控制器与工厂自动化,2007
[13]张进秋等.可编程控制器原理及应用实例.北京:
机械工业出版社,2004
[14]杨卫东.仪表技术杂志.2007(10)


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- PLC 课程设计 坐标 机械手
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 对中国城市家庭的教育投资行为的理论和实证研究.docx
对中国城市家庭的教育投资行为的理论和实证研究.docx
-
二年级下册数学练习题大全.docx
-
二十年后回故乡的优秀作文.docx
-
软基换填施工方案.docx
-
《黑白装饰画》教案.docx
-
课堂教学改革实施方案5篇.docx
-
返璞归真简约致美解读《给予树》教学设计语文.docx
-
离职证明范本精选多篇.docx
-
《天局》全文.docx
-
我害怕作文集合15篇.docx
-
伏魔战记39详细攻略.docx
-
幼儿园学期计划.docx
-
雅思分类打印版Word格式文档下载.docx
-
年产1万吨竹子纤维加工项目可行性研究报告文档格式.docx
-
电商产业化项目投资经营商业计划书Word文件下载.docx
-
医学多媒体课件的设计与制作Word文档格式.docx
-
中学生中秋节想象作文Word格式.docx
-
等保20之漏洞扫描系统技术方案建议书Word文档格式.docx
-
培训学校个人工作计划模板5篇Word格式.docx
-
北京各区二模试题分类汇编文言文阅读Word文档下载推荐.docx
-
不同职业病危害因素的防护常识Word格式文档下载.docx
-
一年级上册同音形近字练习汇总Word文档格式.docx
-
班级家长会上班主任教师讲话稿Word下载.docx
-
科斯塔环载波恢复Word文件下载.docx
-
浙教义务版六年级语文下册教案 花潮Word文件下载.docx
-
集成电路设计与集成系统专业Word格式文档下载.docx
-
开工第一课专题讲座观后感文档格式.docx
-
东城区学年第一学期高三期末化学试题及答案Word格式文档下载.docx
-
苏教版六年级语文下册第七单元测试题Word格式文档下载.docx
-
学长征精神做红色传人活动方案文档格式.docx
-
读书笔记150字30篇文档格式.docx
-
中级经济法考前必背法条精华版备考资料Word格式.docx
-
大学计算机基础access实验.docx
-
端午节包粽子比赛主持词.docx
-
大学生关于青春演讲稿演讲稿.docx
-
锻造工艺复习题.docx
-
大学生销售简历模板下载.docx
-
大学生职业生涯规划历年考试.docx
-
大学校研究生会规章制度.docx
-
地下综合管廊第三方检测方案.docx
-
大学英语四级翻译答题技巧及答题步骤.docx
-
第三章地基处理与桩基础工程.docx
-
棣花文化旅游开发区工程安全监理实施细则.docx
-
电大政治学原理形考答案.docx
-
电教工作计划6篇.docx
-
电力机务员题库测试与答案12.docx
-
电信竞赛领导讲话.docx
-
电子测量实验报告.docx
-
电子通讯设备仪器及设备制造业指导书doc 12页.docx
-
订货会策划实施方案.docx
-
东北大学15秋学期材料科学导论在线作业1.docx
