 遥测遥感网部分解答文档格式.docx
遥测遥感网部分解答文档格式.docx
- 文档编号:19129274
- 上传时间:2023-01-04
- 格式:DOCX
- 页数:14
- 大小:75.62KB
遥测遥感网部分解答文档格式.docx
《遥测遥感网部分解答文档格式.docx》由会员分享,可在线阅读,更多相关《遥测遥感网部分解答文档格式.docx(14页珍藏版)》请在冰豆网上搜索。
ifmod(m,2)==1%表明为奇数层
forn=1:
ceil(b/(sqrt(3)*r))
zx=[zx,sqrt(3)*r/2+sqrt(3)*r*(n-1)];
zy=[zy,r/2+3*r*(m-1)/2];
end
else%表明为偶数层
ifb>
ceil(b/(sqrt(3)*r))*sqrt(3)*r-sqrt(3)*r/2
ceil(b/(sqrt(3)*r))+1
zx=[zx,0+sqrt(3)*r*(n-1)];
zy=[zy,2*r+3*r*(m/2-1)];
else
end
axis([0,b,0,b]);
axissquare;
%plot(zx,zy,'
*'
)
holdon
forj=1:
length(zx)
x=zx(j);
y=zy(j);
%fill(x+r*cos(Ar),y+r*sin(Ar),'
g'
);
%填充圆
plot(x+r*cos(Ar),y+r*sin(Ar),'
-'
'
LineWidth'
2);
%画圆
plot(x,y,'
o'
MarkerSize'
10,'
MarkerFaceColor'
k'
%画圆心
holdoff
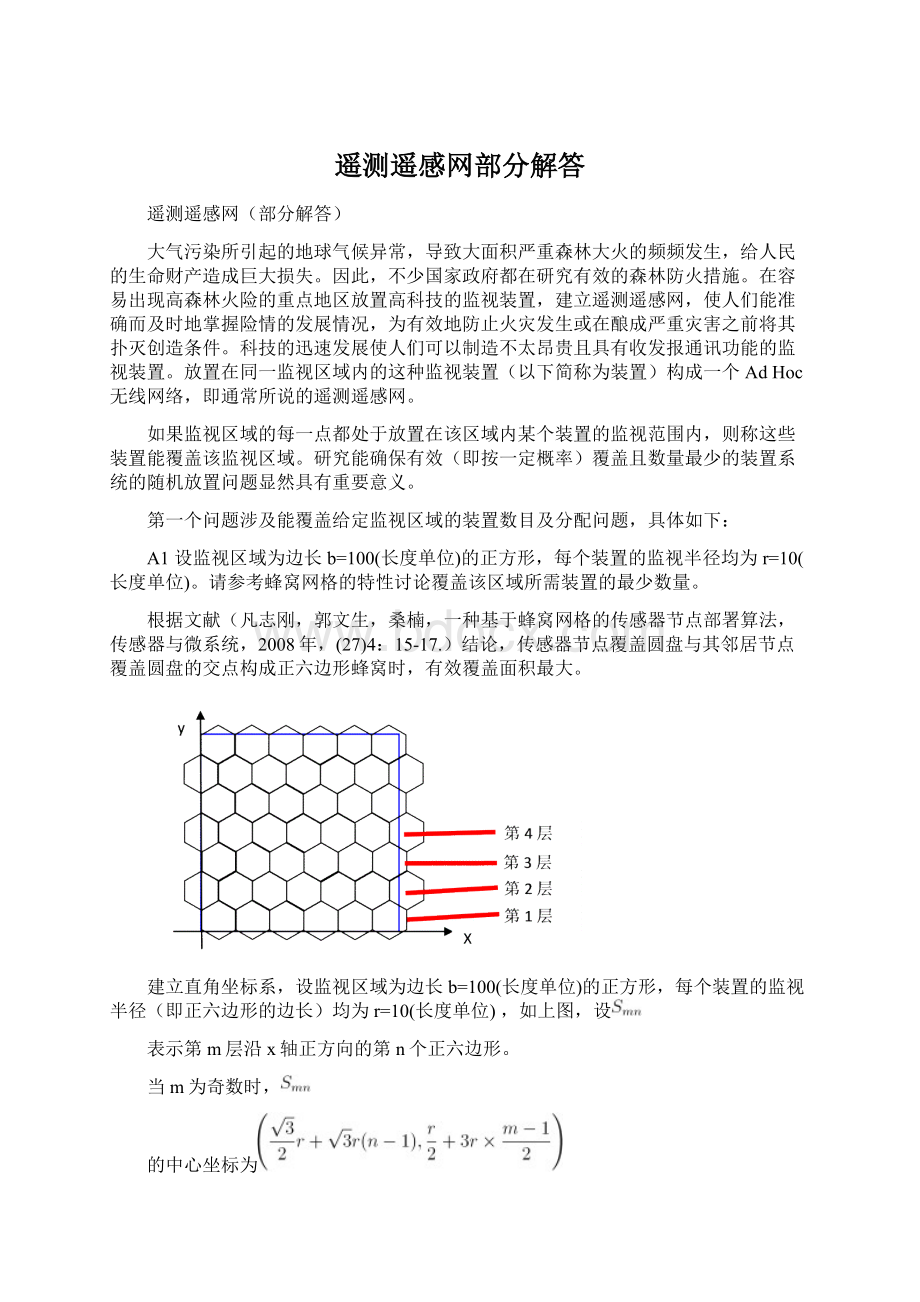
A2在设计遥测遥感网时,首先需要知道对给定监视区域在一定的覆盖保证下应放置装置的最佳(越少越佳)数量,并且常假设装置在监视区域内是均匀地随机放置的。
请在上述假设下建立数学模型,利用随机模拟实验回答:
对于A1中给定的监视区域及监视半径,至少需要随机放置多少个装置,才能使得成功覆盖整个区域的概率在95%以上?
并给出一个均匀随机放置装置的分布图。
采用随机模拟,对装置个数依次取311~396个,可以看到成功覆盖整个区域的概率都小于95%,最大83%,因此,取间距更大(每隔10)的个数400~590进行试验,得结果表如下,表明大约至少需要540个装置,才能使得成功覆盖整个区域的概率在95%以上。
编号
1
2
3
4
5
6
7
8
9
10
个数
311
312
313
314
315
316
317
318
319
320
成功率
41
39
40
37
56
48
55
44
11
12
13
14
15
16
17
18
19
20
321
322
323
324
325
326
327
328
329
330
50
53
51
49
46
45
21
22
23
24
25
26
27
28
29
30
331
332
333
334
335
336
337
338
339
340
57
47
54
52
31
32
33
34
35
36
38
341
342
343
344
345
346
347
348
349
350
60
58
63
62
42
43
351
352
353
354
355
356
357
358
359
360
61
59
64
66
361
362
363
364
365
366
367
368
369
370
65
74
68
71
67
69
70
371
372
373
374
375
376
377
378
379
380
72
80
73
75
76
77
78
79
381
382
383
384
385
386
387
388
389
390
83
81
82
84
85
86
87
88
89
90
391
392
393
394
395
396
400
410
420
430
93
91
92
94
95
96
97
98
99
100
440
450
460
470
480
490
500
510
520
530
101
102
103
104
105
106
107
108
109
110
540
550
560
570
580
590
试验代码如下:
clc;
clear;
Maxs=100;
%模拟次数
L=100;
%正方形区域边长
R=10;
%圆半径
[m,n]=meshgrid(1:
L);
N0=[400:
10:
600];
%N=346;
%统计圆的数目
fork=1:
length(N0)
N=N0(k);
ss=0;
fori=1:
Maxs
M=zeros(L);
%覆盖状态
scale=0;
%覆盖面积比例
x=L*rand(1,N);
%随机位置坐标
y=L*rand(1,N);
%随机位置坐标
forj=1:
N
D=sqrt((m-x(j)).^2+(n-y(j)).^2);
%计算坐标点到圆心的距离
[m0,n0]=find(D<
=R);
%检测出圆覆盖点的坐标
Ind=sub2ind([L,L],m0,n0);
%坐标与索引转化
M(Ind)=1;
%改变覆盖状态
scale=sum(M(1:
end))/L/L;
%计算覆盖比例
ifscale>
=1;
%检测是否满足覆盖比例
ss=ss+1;
%结束循环
fenbu(k)=ss;
%存储满足条件的装置个数
result=[N0(1:
length(fenbu));
fenbu];
A3对一般矩形以及多边形的监视区域进一步探讨以上问题。
由于监视旱情的遥测遥感网地处边远地区,它的每个(除极少数例外)装置都只能以电池为能源,电池用尽装置即报废。
因此,如何节省电池能耗是设计此类网络运行方案的头等大事。
常用的一个很有效的节能措施是:
让大多数装置“休眠”只保留尽可能少的装置“值班”。
对同时选出的这些值班装置的全体,必须要求它们整体具有与遥测遥感网的每个装置都能联系的功能,从而保证当任何休眠装置定时“苏醒”后若发现“险情”,都能及时向值班者之一传递险情信息。
遥测遥感网的若干装置组成的子集S称为一个支配集,如果该遥测遥感网中不属于S的任一装置必位于S中某个装置的通讯范围之内(即二者可互相交换信息)。
不言而喻,上述同时“值班”的装置的集合必须要求是该遥测遥感网络的一个支配集。
从实际应用的角度来说,这种支配集的优劣以其包含的装置个数来衡量(越少越优)。
此外,如果把考虑的遥测遥感网视为一个无向图(每个装置是它的顶点,二顶点相邻接当且仅当二点间的距离小于公共的通讯半径R)。
支配集按图论意义是连通者更为可取,因为通过仅在支配集内部传递信息的手段可以让它的每个装置共享任一装置所得到的信息,这样的支配集自然称为连通支配集。
第二个问题涉及求元素尽可能少的支配集和连通支配集的问题,具体如下:
B1设监视区域为边长b=100(长度单位)的正方形,每个装置的通讯半径均为R=10(长度单位)。
已知在该监视区域内放置了120个装置,它们位置的横、纵坐标依次是:
x=57,95,34,31,52,30,15,75,75,65,55,41,36,72,16,85,86,75,32,5,16,25,72,68,61,37,48,81,23,35,6,85,64,22,69,80,76,88,25,62,70,45,35,75,35,56,27,92,25,44,5,17,90,25,58,95,87,68,30,9,32,47,50,56,56,47,80,10,12,63,39,81,43,17,80,45,92,78,89,51,40,65,76,30,26,28,25,29,40,4,74,41,39,95,72,79,78,10,8,15,45,70,90,84,20,40,55,5,73,22,17,50,55,87,72,55,7,85,35,10.
y=58,74,12,68,67,4,75,52,30,28,63,61,20,24,10,49,90,90,20,92,35,66,4,33,35,78,46,31,90,66,33,9,37,13,43,83,13,94,95,45,70,42,9,41,91,30,92,90,58,52,80,33,5,74,47,2,72,88,28,9,95,71,43,43,25,25,64,96,33,70,9,89,14,25,55,61,40,22,45,51,90,49,7,98,34,99,8,63,83,11,44,25,21,51,76,8,44,80,89,95,90,82,78,78,70,71,70,95,18,28,80,10,20,22,98,79,2,20,50,68.
请建立数学模型找出一个较好的支配集;
画出该120个装置的分配图,并在此图上标出所找到的支配集。
解答:
1、画图
2、建模
设
表示第
个装置属于支配集,否则,
,
建立如下优化模型。
其中
个装置的坐标。
目标就是使得支配集的元素个数最少,约束条件是:
第
个点要么是支配点,此时
,要么不是支配点,即
,则必需与支配点(
)相连。
3、贪婪算法(参见文献:
廖飞雄,马良,禁忌遗传算法求解最小支配集,计算机工程与应用,2007,(24)43,81-84.)
如果把考虑的遥测遥感网视为一个无向图(每个装置是它的顶点,二顶点相邻接当且仅当二点间的距离小于公共的通讯半径R),将图的顶点记为
,其对应的度数(即邻接顶点数)记为
贪婪算法可描述为:
Step1将V中的顶点按顶点度数从大到小逆序排列成点集V’,并全部顶点设置为未标号;
Step2取V’中第一个顶点,若该点已经标号,并在V’删除该点,转至步骤3;
否则,将该点标号为1,并将与之相关联且未标号的顶点标号为0,在V’删除该点;
Step3若V’为空,转至步骤4;
否则,转至步骤2;
Step4取标号为1的顶点作为支配点,把这些点组成的点集为最小支配集。
逆序启发式算法求出的结果是图的一个极小支配集。
利用matlab编程求得的极小支配集共有36个装置,他们依次是第3,78,10,35,47,64,99,4,18,50,52,93,107,7,17,32,81,8,15,16,23,57,59,1,26,41,42,49,90,113,31,56,67,77,94,112个装置,相应的坐标为
X=34.0,78.0,65.0,69.0,27.0,56.0,8.0,31.0,75.0,44.0,17.0,39.0,55.0,15.0,86.0,85.0,40.0,75.0,16.0,85.0,72.0,87.0,30.0,57.0,37.0,70.0,45.0,25.0,4.0,55.0,6.0,95.0,80.0,92.0,95.0,50.0;
Y=12.0,22.0,28.0,43.0,92.0,43.0,89.0,68.0,90.0,52.0,33.0,21.0,70.0,75.0,90.0,9.0,90.0,52.0,10.0,49.0,4.0,72.0,28.0,58.0,78.0,70.0,42.0,58.0,11.0,20.0,33.0,2.0,64.0,40.0,51.0,10.0;
他们的覆盖图形如下
他的代码如下:
%%b1
x=[57,95,34,31,52,30,15,75,75,65,55,41,36,72,16,85,86,75,32,5,16,25,72,68,61,37,48,81,23,35,6,85,64,22,69,80,76,88,25,62,70,45,35,75,35,56,27,92,25,44,5,17,90,25,58,95,87,68,30,9,32,47,50,56,56,47,80,10,12,63,39,81,43,17,80,45,92,78,89,51,40,65,76,30,26,28,25,29,40,4,74,41,39,95,72,79,78,10,8,15,45,70,90,84,20,40,55,5,73,22,17,50,55,87,72,55,7,85,35,10];
y=[58,74,12,68,67,4,75,52,30,28,63,61,20,24,10,49,90,90,20,92,35,66,4,33,35,78,46,31,90,66,33,9,37,13,43,83,13,94,95,45,70,42,9,41,91,30,92,90,58,52,80,33,5,74,47,2,72,88,28,9,95,71,43,43,25,25,64,96,33,70,9,89,14,25,55,61,40,22,45,51,90,49,7,98,34,99,8,63,83,11,44,25,21,51,76,8,44,80,89,95,90,82,78,78,70,71,70,95,18,28,80,10,20,22,98,79,2,20,50,68];
%plot(x,y,'
%%%%%%%%%%%55555贪婪算法
%通讯半径
fori=1:
length(x)
A(i,:
)=(x(i)-x).^2+(y(i)-y).^2<
r^2;
%计算邻接矩阵
A(i,i)=0;
dushu(i)=sum(A(i,:
));
%计算第i个节点的度数
yuanxu=[1:
length(x)];
%原始顺序
[~,iv]=sort(dushu,'
descend'
%按度数从大到小排序
s=[];
%支配集
while~isempty(iv)
s=[s,iv
(1)];
liandian=yuanxu(A(iv
(1),:
)==1);
%与支配点相连的点
iv
(1)=[];
%删除已经是支配集的点
length(liandian)
iv(iv==liandian(i))=[];
%删除与支配点相连的点
length(s)
zx=x(s(j));
zy=y(s(j));
%支配点的坐标
plot(zx+r*cos(Ar),zy+r*sin(Ar),'
plot(zx,zy,'
plot(x,y,'
)%画所有装置点
4、遗传算法(参见文献:
一个支配集解对应为
,S是一个由0,1组成的序列,图的最小支配集问题转化为一个无约束规划模型
在式中n为顶点规模,C(S)表示S序列对应的非支配点,且不与支配点相关联的顶点集,|C(S)|表示C(S)中顶点的个数。
采用遗传算法,模拟T=5000代,群体规模N=80,交叉概率取pm=0.05,变异概率pc=0.8,得到的最小支配集数目为:
他们依次是第101112131518222931353743474853576370757879909899101102103106107110112113119120个装置。
他们的坐标是:
x=65554136167525236697635279290875063807889410845709040552250553510
y=286361201090669033431399290572437055224511808990827871702810205068
图形如下
Matlab代码为:
clearall;
%初始化参数
%A表示是否相连的0-1矩阵
L=120;
%=length(x);
%装置个数
L];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%5
T=5000;
%仿真代数
N=80;
%群体规模
pm=0.05;
pc=0.8;
%交叉变异概率
bval=round(rand(N,L));
%初始种群
bestv=-inf;
%最优适应度初值
%迭代开始
forii=1:
T
%计算适应度
S=bval(i,:
%取出一个0-1序列
CS=sum(all(A(yuanxu(1-S=


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 遥测 遥感 部分 解答
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 对中国城市家庭的教育投资行为的理论和实证研究.docx
对中国城市家庭的教育投资行为的理论和实证研究.docx
-
二年级下册数学练习题大全.docx
-
二十年后回故乡的优秀作文.docx
-
软基换填施工方案.docx
-
《黑白装饰画》教案.docx
-
课堂教学改革实施方案5篇.docx
-
返璞归真简约致美解读《给予树》教学设计语文.docx
-
离职证明范本精选多篇.docx
-
《天局》全文.docx
-
我害怕作文集合15篇.docx
-
伏魔战记39详细攻略.docx
-
幼儿园学期计划.docx
-
雅思分类打印版Word格式文档下载.docx
-
年产1万吨竹子纤维加工项目可行性研究报告文档格式.docx
-
电商产业化项目投资经营商业计划书Word文件下载.docx
-
医学多媒体课件的设计与制作Word文档格式.docx
-
中学生中秋节想象作文Word格式.docx
-
等保20之漏洞扫描系统技术方案建议书Word文档格式.docx
-
培训学校个人工作计划模板5篇Word格式.docx
-
北京各区二模试题分类汇编文言文阅读Word文档下载推荐.docx
-
不同职业病危害因素的防护常识Word格式文档下载.docx
-
一年级上册同音形近字练习汇总Word文档格式.docx
-
班级家长会上班主任教师讲话稿Word下载.docx
-
科斯塔环载波恢复Word文件下载.docx
-
浙教义务版六年级语文下册教案 花潮Word文件下载.docx
-
集成电路设计与集成系统专业Word格式文档下载.docx
-
开工第一课专题讲座观后感文档格式.docx
-
东城区学年第一学期高三期末化学试题及答案Word格式文档下载.docx
-
苏教版六年级语文下册第七单元测试题Word格式文档下载.docx
-
学长征精神做红色传人活动方案文档格式.docx
-
读书笔记150字30篇文档格式.docx
-
中级经济法考前必背法条精华版备考资料Word格式.docx
-
高二摸底考试 英语试题 含答案.docx
-
互联网电子商务环境下的供应链管理探析研究报告报批稿.docx
-
第十五章存货与仓储循环审计.docx
-
辽宁省专业技术在线学习网络安全知识读本在线考试题及答案78分.docx
-
资格证建筑工程习题含答案1094.docx
-
我们是如何培养孩子热爱学习的.docx
-
内河水运建设项目统计制度试行.docx
-
德阳商贸校新建楼信息化建设方案ver1.docx
-
新教材部编版语文五年级下册22 手指一课一练同步练习含答案.docx
-
Unit 1The Changing World教案.docx
-
新人美版小学美术二年级上册教案.docx
-
高考地理热点考点集锦人口教师版.docx
-
中级会计职称考试《经济法》真题及参考答案解析.docx
-
80万吨高速线材生产线工程方案设计.docx
-
流量计算机.docx
-
第五章 语法部分练习题.docx
-
打牛厂煤矿防突设计623.docx
-
自动检测技术及仪表控制系统第二版复习重点及思考题答案分析.docx
-
最新诲人不倦造句 精品.docx
