 控制系统数字仿真与CAD实验Word文件下载.docx
控制系统数字仿真与CAD实验Word文件下载.docx
- 文档编号:18231496
- 上传时间:2022-12-14
- 格式:DOCX
- 页数:58
- 大小:315.07KB
控制系统数字仿真与CAD实验Word文件下载.docx
《控制系统数字仿真与CAD实验Word文件下载.docx》由会员分享,可在线阅读,更多相关《控制系统数字仿真与CAD实验Word文件下载.docx(58页珍藏版)》请在冰豆网上搜索。
结果
>
A=
-20-70-100-48
1000
0100
0010
B=
1
0
C=
1144848
D=
z=
-9.4641
-2.5359
-2.0000
p=
-16.0051
-1.5269+0.9247i
-1.5269-0.9247i
-0.9412
k=
1.0000
R=
0.3892
-0.0932-0.3754i
-0.0932+0.3754i
0.7973
P=
H=
[]
程序A=[2.25,-5,-1.25,-0.5;
2.25,-4.25,-1.25,-0.25;
0.25,-0.5,-1.25,-1;
1.25,-1.75,-0.25,-0.75];
B=[4;
2;
0];
C=[0,2,0,2];
D=[0];
[num,den]=ss2tf(A,B,C,D)
[R,P,H]=residue(num,den)>
num=
04.000014.000022.000015.0000
den=
1.00004.00006.25005.25002.2500
-1.0000+1.2247i
-1.0000-1.2247i
-1.5000
-0.5000+0.8660i
-0.5000-0.8660i
4.0000
4.0000
-0.0000
0.0000-2.3094i
0.0000+2.3094i
实验二基于Matlab的微分方程数值解法(2学时)
掌握欧拉法、四阶龙格库塔法的程序编制方法。
对微分方程描述的控制系统,利用欧拉法、二阶龙格-库塔法、四阶龙格-库塔法分别编写M文件,进行数值计算和作图。
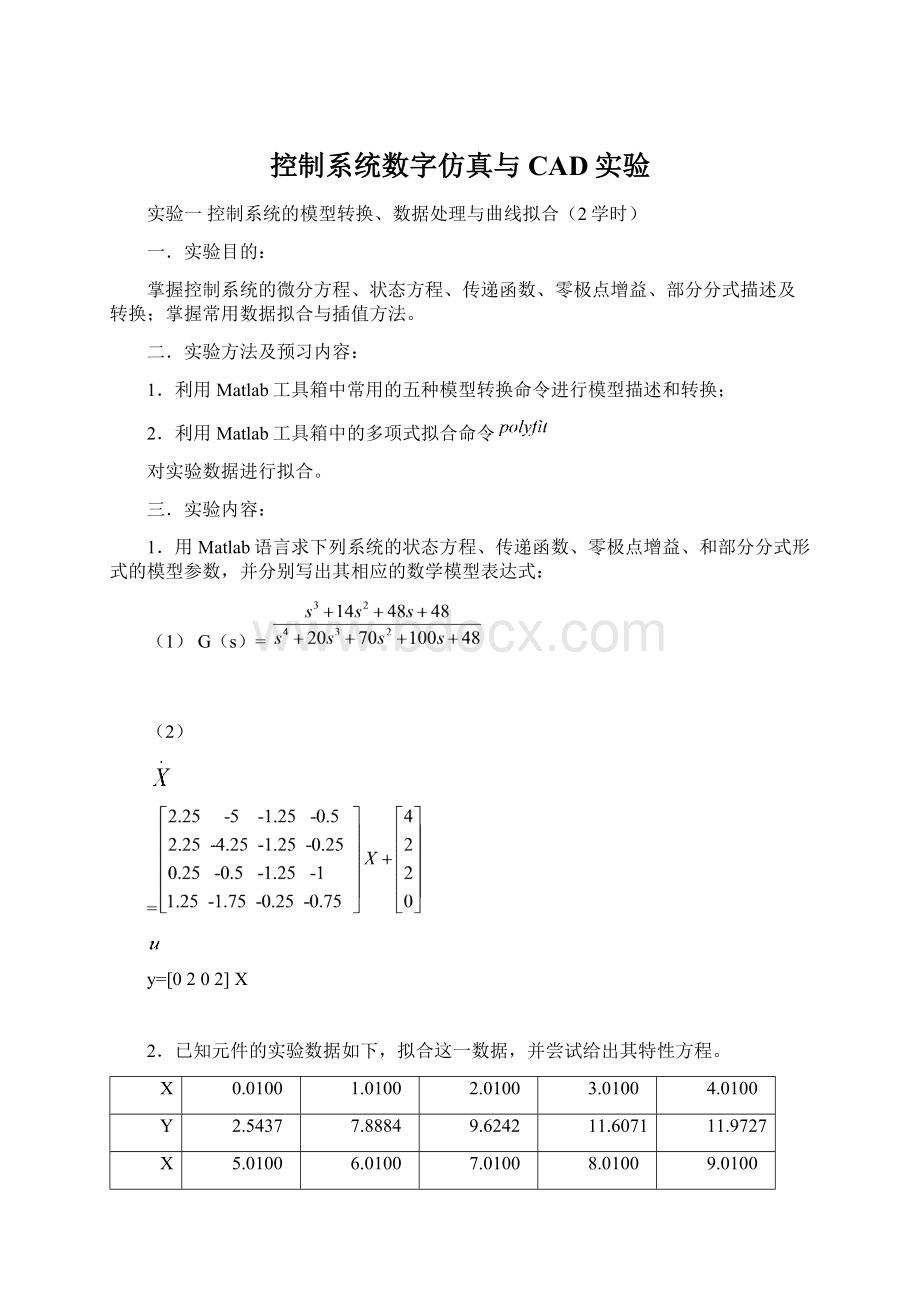
1.分别用欧拉法、二阶龙格-库塔法、四阶龙格-库塔法求下面系统的输出响应y(t)在0≤t≤1上,h=0.1时的数值解。
要求保留4位小数,并将三种方法的结果与真解
进行比较。
2.若为
如何编程计算?
1.每次实验应做好实验前的预习和准备;
2.实验后应及时提交仿真程序(M文件与Word文档)、实验结果和图示、实验分析与总结;
3.认真撰写实验报告。
熟悉微分方程数值解法(欧拉法、二阶与四阶龙格-库塔法)。
程序
欧拉法
h=0.1;
disp('
欧拉法求函数的数值解为'
);
y='
y=1;
fort=0:
h:
1
m=y;
disp(y);
y=m-2*m*h;
End
欧拉法求函数的数值解为
y=
0.8000
0.6400
0.5120
0.4096
0.3277
0.2621
0.2097
0.1678
0.1342
0.1074
二阶龙格—库塔法
二阶龙格—库塔法函数的数值解为'
k1=-2*y;
k2=-2*(y+k1*h);
y=y+(k1+k2)*h/2;
二阶龙格—库塔法函数的数值解为
0.8200
0.6724
0.5514
0.4521
0.3707
0.3040
0.2493
0.2044
0.1676
0.1374
四阶龙格—库塔法
四阶龙格—库塔法求解函数数值解为'
k2=-2*(y+k1*h/2);
k3=-2*(y+k2*h/2);
k4=-2*(y+k3*h);
y=y+(k1+2*k2+2*k3+k4)*h/6;
end
四阶龙格—库塔法求解函数数值解为
0.8187
0.6703
0.5488
0.4493
0.3679
0.3012
0.2466
0.2019
0.1653
0.1353
真解
函数的离散时刻解为'
y=exp(-2*t);
结果
函数的离散时刻解为
0.1353
如何编程计算?
欧拉法
y=m+m*m*h;
1.1000
1.2210
1.3701
1.5578
1.8005
2.1246
2.5760
3.2397
4.2892
6.1289
k1=y*y;
k2=y*(y+k1*h);
1.1050
1.2338
1.3955
1.6038
1.8816
2.2690
2.8423
3.7649
5.4492
9.2277
k2=y*(y+k1*h/2);
k3=y*(y+k2*h/2);
k4=y*(y+k3*h);
1.1052
1.2343
1.3965
1.6058
1.8855
2.2767
2.8587
3.8047
5.5659
9.7082
实验三基于SIMULINK的控制系统时域分析(2学时)
掌握使用SIMULINK、控制工具箱求解系统的输入和输出响应的仿真方法。
利用SIMULINK工具进行控制系统模型分析、系统设计与仿真的相关原理。
1.分别使用解微分方程方法、控制工具箱、Simulink求解具有如下闭环传递函数的系统的阶跃响应。
2.某小功率随动系统动态结构如图所示,已知:
,
。
若系统输入分别为
,试用Simulink分析系统的输出
分别如何?
四.实验要求:
1.熟悉Simulink法进行控制系统时域分析的基本步骤,并与微分方程法、控制工具箱法进行比较;
2.熟悉Simulink法在输入不同信号(单位阶跃、单位斜坡、两阶跃叠加)下的控制系统输出响应实验方法、图形显示。
控制工具箱法
num=[30];
den=[18364010];
sys=tf(num,den);
step(sys);
Grid
解微分方程法
Num=[];
den=[];
[A,B,C,D]=tf2ss(num,den);
建立wffc.m文件
functiondx=wffc(t,x)
u=1;
dx=[-8*x
(1)-36*x
(2)-40*x(3)-10*x(4)+u;
x
(1);
x
(2);
x(3)];
主程序
[t,x]=ode45('
wffc'
[0,20],[0,0,0,0]);
y=30*x(:
4);
plot(t,y);
grid
实验四面向系统结构图的仿真验证(2学时)
从控制系统常见的结构形式拓扑描述入手,掌握面向连续控制系统结构图的计算机仿真方法及其程序实现。
二.实验原理及预习内容:
1.原理:
任何复杂连接结构的线性控制系统都是由一些简单的线性环节组合而成,按照它们之间相互连接的拓扑关系列出连接矩阵,可以得到能清晰地描述复杂连接系统的仿真模型。
2.预习内容:
利用连接矩阵进行复杂控制系统建模的方法和原理。
三.实验步骤:
1.对具有复杂连接闭环结构形式的系统,可用一阶环节作为典型环节,再运用拓扑描述中联接矩阵的表达方法得出此类系统结构的仿真模型;
2.再通过数值积分法求取各环节的动态响应。
注意:
所确定的典型环节中,参数
,以保证系统仿真求解的基本条件。
四.实验内容:
习题3-2.设典型闭环结构控制系统如下图所示,当阶跃输入幅值R=20时,用面向系统结构图的数字仿真法sp3-1.m求取系统的输出响应。
五.实验要求:
1.列出复杂连接闭环系统的仿真程序框图;
2.列出MATLAB程序实现的主要程序,包括输入数据、形成闭环各系统阵、数值积分求解、以及输出结果。
解:
sp3_1.m函数为
b=b/a
(1);
a=a/a
(1);
A=a(2:
n+1);
A=[rot90(rot90(eye(n-1,n)));
-fliplr(A)];
B=[zeros(1,n-1),1]'
;
m1=length(b);
C=[fliplr(b),zeros(1,n-m1)];
Ab=A-B*C*V;
X=X0'
y=0;
t=T0;
N=round((Tf-T0)/h);
fori=1:
N
K1=Ab*X+B*R;
K2=Ab*(X+h*K1/2)+B*R;
K3=Ab*(X+h*K2/2)+B*R;
K4=Ab*(X+h*K3)+B*R;
X=X+h*(K1+2*K2+2*K3+K4)/6;
y=[y,C*X];
t=[t,t(i)+h];
以上程序保存为m文件,文件名sp3_1.m
用sp3_1.m求解过程如下:
在MATLAB语言环境下,输入以下命令语句
a=[0.0160.8643.273.421];
b=[3025];
X0=[0000];
V=2;
n=4;
T0=0;
Tf=10;
h=0.01;
R=20;
sp3_1
[t'
y'
]
plot(t,y)
运行结果为:
ans=
00
0.01000.0054
0.02000.0389
0.03000.1174
0.04000.2502
0.05000.4417
0.06000.6933
0.07001.0045
0.08001.3733
0.09001.7969
0.10002.2717
0.11002.7936
0.12003.3583
0.13003.9608
0.14004.5964
0.15005.2596
0.16005.9453
0.17006.6480
0.18007.3622
0.19008.0826
0.20008.8036
0.21009.5201
0.220010.2267
0.230010.9184
0.240011.5904
0.250012.2380
0.260012.8569
0.270013.4431
0.280013.9926
0.290014.5021
0.300014.9684
0.310015.3889
0.320015.7613
0.330016.0834
0.340016.3539
0.350016.5716
0.360016.7357
0.370016.8459
0.380016.9023
0.390016.9054
0.400016.8560
0.410016.7553
0.420016.6050
0.430016.4070
0.440016.1635
0.450015.8771
0.460015.5506
0.470015.1870
0.480014.7896
0.490014.3621
0.500013.9079
0.510013.4308
0.520012.9349
0.530012.4240
0.540011.9022
0.550011.3734
0.560010.8417
0.570010.3111
0.58009.7855
0.59009.2686
0.60008.7641
0.61008.2756
0.62007.8063
0.63007.3594
0.64006.9379
0.65006.5444
0.66006.1813
0.67005.8509
0.68005.5551
0.69005.2953
0.70005.0731
0.71004.8893
0.72004.7447
0.73004.6398
0.74004.5746
0.75004.5489
0.76004.5624
0.77004.6142
0.78004.7034
0.79004.8286
0.80004.9884
0.81005.1810
0.82005.4044
0.83005.6565
0.84005.9350
0.85006.2374
0.86006.5610
0.87006.9031
0.88007.2608
0.89007.6314
0.90008.0118
0.91008.3991
0.92008.7903
0.93009.1825
0.94009.5727
0.95009.9581
0.960010.3360
0.970010.7037
0.980011.0586
0.990011.3984
1.000011.7207
1.010012.0236
1.020012.3051
1.030012.5634
1.040012.7970
1.050013.0047
1.060013.1854
1.070013.3381
1.080013.4621
1.090013.5571
1.100013.6229
1.110013.6593
1.120013.6667
1.130013.6455
1.140013.5962
1.150013.5198
1.160013.4172
1.170013.2896
1.180013.1384
1.190012.9650
1.200012.7712
1.210012.5587
1.220012.3294
1.230012.0851
1.240011.8281
1.250011.5603
1.260011.2840
1.270011.0013
1.280010.7144
1.290010.4255
1.300010.1367
1.31009.8502
1.32009.5681
1.33009.2924
1.34009.0249
1.35008.7675
1.36008.5220
1.37008.2900
1.38008.0729
1.39007.8722
1.40007.6890
1.41007.5243
1.42007.3791
1.43007.2542
1.44007.1501
1.45007.0673
1.46007.0059
1.47006.9662
1.48006.9480
1.49006.9511
1.50006.9752
1.51007.0197
1.52007.0840
1.53007.1672
1.54007.2684
1.55007.3867
1.56007.5208
1.57007.6694
1.58007.8313
1.59008.0051
1.60008.1892
1.61008.3821
1.62008.5824
1.63008.7882
1.64008.9982
1.65009.2106
1.66009.4238
1.67009.6363
1.68009.8465
1.690010.0529
1.700010.2540
1.710010.4484
1.720010.6349
1.730010.8121
1.740010.9789
1.750011.1343
1.760011.2773
1.770011.4071
1.780011.5229
1.790011.6240
1.800011.7101
1.810011.7807
1.820011.8355
1.830011.8744
1.840011.8973
1.850011.9045
1.860011.8960
1.870011.8722
1.880011.8335
1.890011.7805
1.900011.7138
1.910011.6341
1.920011.5421
1.930011.4389
1.940011.3253
1.950011.2023
1.960011.0711
1.970010.9326
1.980010.7881
1.990010.6387
2.000010.4856
2.010010.3300
2.020010.1730
2.030010.0159
2.04009.8598
2.05009.7059
2.06009.5552
2.07009.4088
2.08009.2677
2.09009.1329
2.10009.0052
2.11008.8856
2.12008.7746
2.13008.6730
2.14008.5815
2.15008.5004
2.16008.4303
2.17008.3714
2.18008.3241
2.19008.2884
2.20008.2645
2.21008.2523
2.22008.2517
2.23008.2625
2.24008.2846
2.25008.3174
2.26008.3606
2.27008.4138
2.28008.4763
2.29008.5475
2.30008.6268
2.31008.7135
2.32008.8067
2.33008.9058
2.34009.0098
2.35009.1179
2.36009.2293
2.37009.3431
2.38009.4584
2.39009.5743
2.40009.6


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制系统 数字 仿真 CAD 实验
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
春部编版二年级语文下册教学资料第三单元语文园地三教案002Word格式文档下载.docx
-
初中物理第2节运动的描述教学设计学情分析教材分析课后反思Word下载.docx
-
财政部企业内部控制基本规范Word文件下载.docx
-
最新c1驾照科目一模拟考试试题Word文件下载.docx
-
自行车的组装图解单车组装Word格式.docx
-
初中英语时态知识点归纳总结Word文档下载推荐.docx
-
数字信号处理课程设计报告Word格式文档下载.docx
-
桶装水厂质量安全管理制度Word文档格式.docx
-
最新matlab嵌入式代码生成Word下载.docx
-
房地产战略合作协议书范本Word格式.docx
-
B2B商城网站方案设计及应用解析Word文档下载推荐.docx
-
第一次亲密接触Word下载.docx
-
传染病及其预防教案Word文档下载推荐.docx
-
《观潮》优秀教案文档格式.docx
-
水利工程造价练习题doc文档格式.docx
-
非煤矿山安全生产监管工作的指南Word文档下载推荐.docx
-
传感器原理与应用习题Word下载.docx
-
五年级下册英语素材寒假讲义之 unit1 Cinderella 译林版Word文件下载.docx
-
五年级音乐上册Word下载.docx
