 机器人的运动学分析与模拟外文文献翻译中英文翻译外文翻译文档格式.docx
机器人的运动学分析与模拟外文文献翻译中英文翻译外文翻译文档格式.docx
- 文档编号:17657241
- 上传时间:2022-12-07
- 格式:DOCX
- 页数:30
- 大小:4.04MB
机器人的运动学分析与模拟外文文献翻译中英文翻译外文翻译文档格式.docx
《机器人的运动学分析与模拟外文文献翻译中英文翻译外文翻译文档格式.docx》由会员分享,可在线阅读,更多相关《机器人的运动学分析与模拟外文文献翻译中英文翻译外文翻译文档格式.docx(30页珍藏版)》请在冰豆网上搜索。
第一种方法需要分析每一个共同的特点在这个混合的铰链,因此它是复杂和容易出错的[4]。
同时,在第二个方法中,虽然一般理论分析介绍了所有封闭的链,分解结构不提出这个理论并不是由实验验证。
考虑这两个方法,这将是容易确定关节的坐标系之间的关系如果我们知道的运动学特征的特殊结构。
因此分析了特殊结构的运动特征基于封闭的开链理论。
然后直接坐标系统建立在每个活动关节。
该方法的优点是,它可以避免判断各运动副的运动结构[5]。
此外,它方便构建下面提到的仿真模型。
2新型机器人的运动学特征
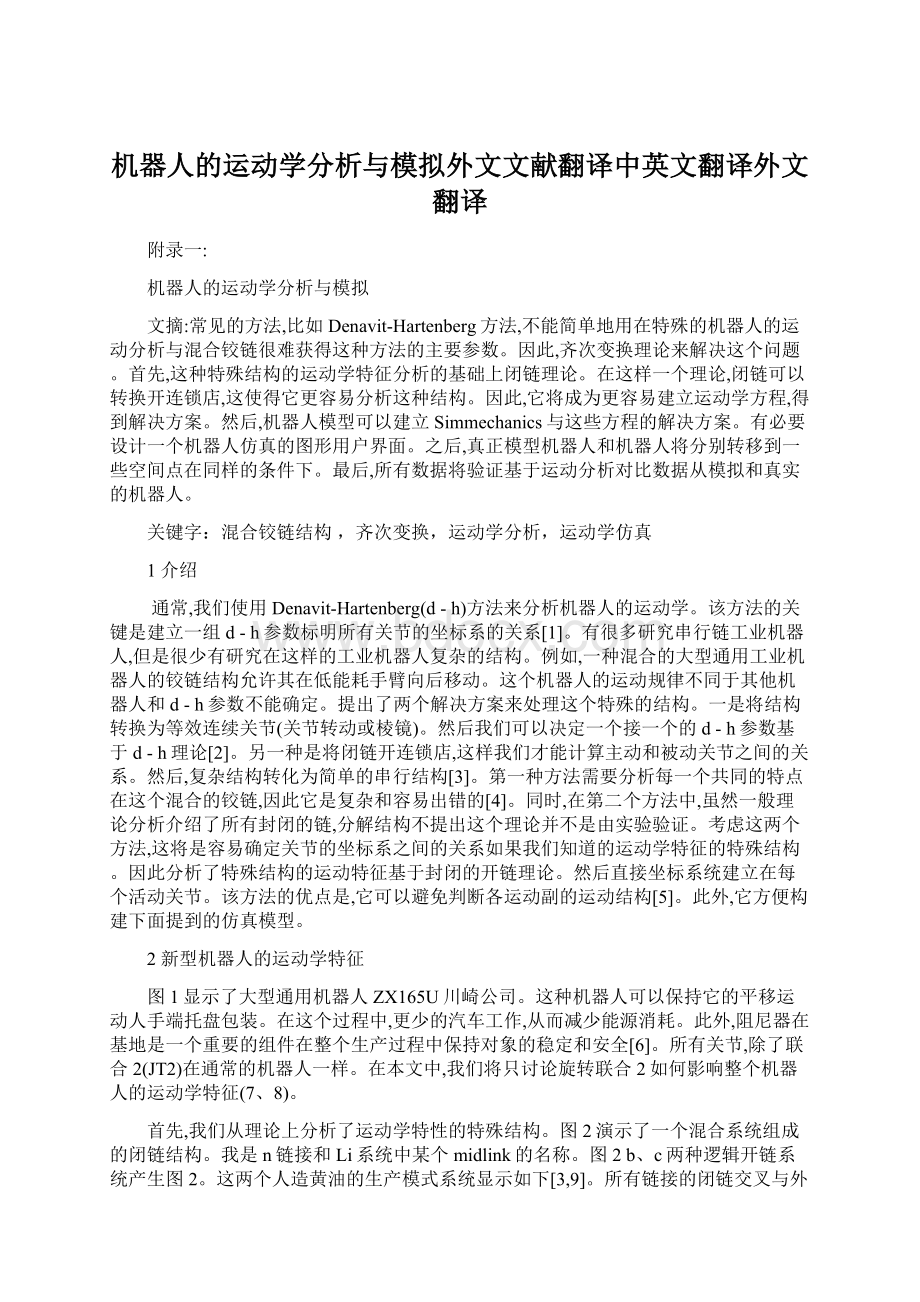
图1显示了大型通用机器人ZX165U川崎公司。
这种机器人可以保持它的平移运动人手端托盘包装。
在这个过程中,更少的汽车工作,从而减少能源消耗。
此外,阻尼器在基地是一个重要的组件在整个生产过程中保持对象的稳定和安全[6]。
所有关节,除了联合2(JT2)在通常的机器人一样。
在本文中,我们将只讨论旋转联合2如何影响整个机器人的运动学特征(7、8)。
首先,我们从理论上分析了运动学特性的特殊结构。
图2演示了一个混合系统组成的闭链结构。
我是n链接和Li系统中某个midlink的名称。
图2b、c两种逻辑开链系统产生图2。
这两个人造黄油的生产模式系统显示如下[3,9]。
所有链接的闭链交叉与外部世界的决心(如Lm和Lm+4在图2)。
然后所有并行链接连接到这些链接(Lm和Lm+4)发现。
因此我们可以很容易地选择两个不同的路线(从Lm到Ln),不存在并行链接的地方。
最后,生成两个逻辑人造系统根据相应的选择路线。
因此,所有静定链接存在于人造黄油的逻辑系统,如图所示。
2a,b。
图1工业机器人组成的混合铰链结构
考虑到机器人的特点,我们正在研究,有完全8链接。
所以n将等于8如果m等于1(见图2)。
自由度(N)等于6(活动关节的数量)和被动关节(P)的数量等于3。
我们假设主动关节变量的作为qA,i(i=1、2_,6)和被动关节的变量qP;
j(j=1、2、3)。
在刚体动力学的理论基础和研究范围,刚性位移只是由六个主动关节完全[10]。
相应的方程
(1)
方程
(1)显示了位移被动和主动关节之间的依赖关系,可以写成
(2)
还有其他两个几何约束。
一个是链接Lm+1是固定在底座上。
另一个是封闭的链平行四边形结构。
因此,从公式
(2)我们可以获得
-q4=-q5=q3=q2(3)
即,Lm+1和Lm+2所做的一样。
因此,机械手固定在连接Lm+5继续执行翻译一致。
图3显示了机器人的仿真模型。
只有联合2是仿真过程中旋转。
图3显示了机器人的初始状态意味着所有关节的角度都是0。
图3b,c展示相应的机器人的状态当联合2π/4分别顺时针和逆时针方向移动。
机械手保持平移运动,这与实际情况是一致的(见图3)。
现在,我们可以得出结论,机器人执行平移运动的效应器,同时所有关节都是固定的,除了旋转接头2。
图2闭链系统和人造系统
图3机器人机械手的运动状态,只有JT2取数0,-π/4,π/4
3运动学分析
运动学分析的目的是描述运动关节和效应器之间的关系。
分析解决方案可以演示如何控制机器人运动,并建立动态方程和模型误差分析(11、12)。
3.1正向运动学和齐次变换
关节的位置和方向可以描述刚体坐标系统固定在关节[10]。
所以我们建立坐标系统在每一个活动关节[12]。
在图4中,ZX165U机器人的坐标系统。
首先,建立了坐标系1,它伴随着基础坐标系0。
为了方便起见,Z轴平行的轴旋转接头和Z轴的方向是由右手的旋转方向和固定的传统规则。
第二个轴是完全符合一个特定轴在以前的坐标系统。
最后一个轴是由右手规则了。
尺寸参数坐标系统的图4所示,在Z1-Z6与转动关节JT1-JT66是一致的,L1=670mm,L3=1100mm,L4=270mm,L5=288mm,L6=1100mm,L7=228mm。
根据齐次变换公式
(4)
我们可以获得所有矩阵:
。
字符“e”代表效应器协调;
T指从坐标i-1到i之间的转换关系;
D是指翻译向量从i-1到i之间的协调。
在图4中,例如,坐标系统在那场1变化L2距离,和转变L1距离在2。
然后逆时针方向旋转π/2左右+Y。
然后它可以转化为协调2。
转换矩阵
在TYZ(左1)和T(左2)指翻译矩阵;
L1和L2翻译长度沿相应的轴;
RY(h)是指旋转矩阵;
h是逆时针方向旋转角的+Y。
当其他矩阵计算,坐标变换矩阵的效应器基地协调获得(13、14)。
正向运动学如下解决方案
图4ZX165U齐次坐标系统
Cji=(θi+θj),i,j=1,2…6。
3.2逆运动学
机器人逆运动学问题是计算所有相应的关节角度给出当机器人的姿态和位置[13]。
换句话说,联合变量θi(i=1,2…6)基于运动学方程可以确定如果值n,o,a,p和所需的几何参数是已知的[14]。
方程(7)用于解决逆运动学方程。
本文确定了前三个关节变量θi(i=1,2,3)通过代数方法,和常见的逆变换方法[15]是用来确定最后三个联合变量θi(i=4,5,6)。
首先,只剩下1h和其他变量是通过消去法消除Eq(16、17)。
(7)等
假设
方程(11)替换回方程式。
(8)和(9),那么情商。
(12)。
因此
在方程式(10)和(11),双方的二次组件被添加在一起,整理得:
方程(18)是情商的扣除双方乘以。
(6)与所有从联合1-联合3逆变换矩阵,
所以我们得到以下方程:
左边的一部分。
(19)包含已知联合变量即。
i,e、θ1、θ2和θ3,而另一侧包含联合变量θ4、θ5和θ6是解决。
作为一个结果,
解决单一的方案,θ5=0
4仿真分析
模型仿真可以验证运动学分析的正确性,并提供直观的理解和严格的数据(1、18)。
机器人模型探讨了构建依赖MATLAB平台的强大功能。
4.1工具箱和模型
有两个合格的需求(19、20)。
第一个是建立一个精确的机器人模型。
第二个是控制模型进行交流沟通的!
模块数据基地,我们可以构建一个复杂的力学模型来实现机械结构的模拟。
同时,司机和传感器模块连接Simmechanics的有效方法与仿真软件(21、22)。
如图5所示,该模型系统可以模拟系统控制的设计GUI。
图所示。
5,有六个活动关节,三个被动关节和三个固定关节。
图6显示了机器人的模块图(KawasakiZX165U)。
图5在Simmechanics生成模型
图6川崎ZX165U机器人的模块图
图7的GUI设计用于控制机器人模型
包括以下功能设计GUI(见图7):
(1)控制仿真的过程;
(2)
(2)转发和审查关节角的信息;
(3)(3)获得信息操纵者的姿势,然后保存数据。
4.2.验证运动学分析
图8显示了真正的机器人ZX165U的照片。
在实验中,机器人的效应器经过两种不同的方式,其中一个看起来像字母“W”而另一个看起来像一个“S”(参见无花果。
9和10)。
图8机器人ZX165U的物理图像
图9真实和模拟“W”路径
图10真实和模拟“S”路径
ZX165U机器人可以驱动可及空间中任意点只要一组适当的值(联合角度或姿势)解决。
在这个实验中,五组的数据点显示关节角度被放入控制器。
然后控制器控制机器人通过这五个点线性插值(参见图9)和曲线插值(参见图10)。
在这个过程中,机械手的姿势和位置可以在每一个对应点从教学吊坠。
然后我们让机器人模型遵循虽然通过使用上述5点的相同的数据,但这一次我们使用GUI来输入数据。
直观地,路径绘制在一个三维坐标系统只涉及到机器人的位置值,但不涉及姿势数据。
保证10表示相反的。
从图9和10可以明显看到,实际的路径匹配模拟路径在一定范围的小错误。
这些小错误不能注意到,除非路径放大了许多倍。
事实上,准确性已经接近0.02毫米,如表1和2所示。
我们选择五套任意的数据流程上面,把所有的信息都在表格1中。
表2显示了数据表明反向运动,以不同的方式获得。
当真正的和仿真机器人移动到指定的姿势和位置相同,联合角度的数据将被记录下来。
在表1和2中,“r-”和“s-”代表字分别“真实”和“模拟”。
在表1中,模拟结果和实际结果之间的平均误差是0.0206毫米和0.037毫米的最大误差。
具体来说,位置错误是0.0258毫米,0.0218毫米和0.0142毫米对应X,Y和z.这样的精度能满足任何工业需求。
O,AandTstandX,Y,Z欧拉角,分别。
此外,造成错误几乎可以忽略不计。
实际上,我们永远不能看到机器人移动时由微小转移的距离。
在表2中,平均误差是0.0011吗?
通过粗略的计算错误的数据。
没有JT45。
这意味着模型机器人可以达到某个点在一个可接受的误差范围(小错误是不可知的)。
正如在前一节中提到的,运动学分析是绝对正确的,可以通过数据的对比分析证明。
5结论
分析和验证了运动学特征(平移运动)的一个新型机器人混合铰链结构。
运动学分析的基础上,可以很容易地执行。
然后建立了运动学方程,解决了用齐次变换理论。
机器人模型建立运动学方程的解决方案可用于模拟和获得通过GUI设计的仿真数据。
五组选择这些数据,进行了分析和比较。
实际数据和仿真数据之间的误差计算分析。
如表1和2所示,轻微的错误,这意味着仿真模型的完全可以满足实际的要求。
此外,运动学分析的正确性证明的基础上适当的数据分析。
本文希望为那些正在研究提供一些灵感或者去研究这种机器人混合铰链结构。
表1的效应器的姿势从六个角度计算值(正向运动学)
表2计算的6个关节角度的效应器姿势(反向运动)
确认本研究重点科技项目支持的上海科委(批准号12111101004)。
文献
1.BiLY,LiuLS(2012)基于模拟六轴机器人的设计和仿真。
YangDH(ed)信息控制,自动化和机器人技术》,133卷。
施普林格,海德堡,页537-544
2.SongT,HeYY,WangPetal(2013)系列工业机器人的运动学分析与混合铰链结构。
MachDesRes5:
8–9
3.FathiHG,OlivierC,RuvindaGetal(2000)建模和控制设置点闭链机制:
理论和实验。
IEEETransControlSystTechnol8(8):
801–815
4.WangKS,TerjeKL(1988)结构设计和机器人机械手的运动学。
Robotica6(4):
299–309
5.SeligJM(2011)poin-tplane的几何约束刚体位移。
ActaApplMath116:
133–155
6.SuguruA,MasahiroS(2006)人类与冗余自由度机器人手臂的运动:
虚拟弹簧减震器假设解决伯恩斯坦的问题。
IEEE机器人与自动化国际会议上提出,奥兰多,2006年5月
7.ChoiHB,KonnoA,UchiyamaM(2009)封闭的四自由度并联机器人的运动学正解。
IntJControlAutomSyst7(5):
858–864
8.PislaD,GhermanB,VaidaCetal(2012)五自由度混合并联机器人的运动学建模腹腔镜手术。
Robotica30(7):
1095–1107
9.Gallardo-AlvaradoJ(2005)混合动力机械手的运动学螺旋理论的方法。
MultibodySysDyn14(3/4):
345–366
10.KuoSR,YangYB(2013)刚体合格板理论的非线性结构分析涉及扭转操作。
EngStruct47:
2–15
11.WangZY,ZhaoZQ,PangZFetal(2011)运动学分析和仿真的3自由度空间机器人机制由封闭的链。
第二次国际会议上机械自动化和控制工程,2011年7月
12.WenGJ,XuLH,HeFL(2009)离线6自由度焊接机器人的运动学仿真。
:
9测量技术和机电一体化自动化国际会议上,张家界,2009年4月
13.XiaoWL,HenningS,TorstenLetal(2011)封闭的逆运动学与奇点避免6r机器人铣削。
ProdEngDevel5:
103–110
14.WuY,ChengLH,FanGFetal(2014)6自由度搬运机器人的逆运动学解和优化。
ApplMechMater635–637:
1355–1359
15.GaoJR,WangYZ,ChenZP(2014)逆运动学的建模与仿真基于SimMechanics平面3-RRR并联机器人。
AdvMaterRes898:
510–513
16.MarkusL(1994)应用程序一般消元法的机器人运动学。
JIntellRobSyst11:
109–116
17.ShiZX,YeMY,LuoYFetal(2011)分离的主要条款消除算法及其应用在5R机器人的逆运动学分析。
计算机科学国际会议和服务系统,南京,2011年6月
18.WangYS,GaiYX,WuFY(2011)机器人运动学仿真系统基于开放GL。
IEEE会议机器人、自动化和机电一体化,青岛,2011年9月
19.PhungAS,MalzahnJ,HoffmannFetal(2011)数据基于运动学模型的不同载荷的机械臂多灵活的链接。
IEEE机器人和仿生学国际会议上,KaronBeach,December2011
20.TozM,KucukS(2008)工业机器人机械手动力学仿真工具箱。
ComputApplEngEduc
18
(2):
319–330
21.FatehiMH,ValiAR,EghtesadMetal(2011)建模和控制3-PRS并联机器人和仿真基于SimMechanicsMATLAB。
2号国际会议控制、仪表和自动化,Shiraz,December2011
22.Dean-LeonE,NairS,KnollA(2012)使用的MATLAB工具箱为象征性的机器人动态建模用于控制设计。
IEEE机器人仿生学,国际会议上广州,2012年12月
附录二:
Kinematicanalysisandsimulationofanew-typerobotwithspecialstructure
AbstractCommonmethods,suchasDenavit-Hartenberg(D-H)method,cannotbesimplyusedinkinematicanalysisofspecialrobotswithhybridhingeasitisdifficulttoobtainthemainparametersofthismethod.Hence,ahomogeneoustransformationtheoryispresentedtosolvethisproblem.Firstly,thekinematicscharacteristicofthisspecialstructureisanalyzedonthebasisoftheclosed-chaintheory.Insuchatheory,closedchainscanbetransformedtoopenchains,whichmakesiteasiertoanalyzethisstructure.Thus,itwillbecomemucheasiertoestablishkinematicsequationsandgetthesolutions.Then,therobotmodelcanbebuiltintheSimmechanics(atoolboxofMATLAB)withtheseequationsolutions.Itisnecessarytodesignagraphicaluserinterface(GUI)forrobotsimulation.Afterthat,themodelrobotandrealrobotwillrespectivelymovetosomespatialpointsunderthesamecircumstances.Atlast,alldataofkinematicanalysiswillbeverifiedbasedoncomparisonbetweendatagotfromsimulationandrealrobot.
KeywordsMixedhingestructure?
Homogeneoustransformation?
Kinematicanalysis?
Kinematicsimulation
1Introduction
Usually,weuseDenavit-Hartenberg(D-H)methodtoanalyzethekinematicsofrobot.ThekeyofthismethodistoestablishasetofD-Hparameterswhichindicatetherelationshipofthecoordinatesystemsofalljoints[1].Therearealotofstudiesontheserialchainindustryrobots,howeverfewstudiesareonsuchindustryrobotswithcomplexstructures.Forexample,akindoflargeuniversalindustryrobotwithhybridhingestructureallowsitsarmtomovebackwardsinlowenergyconsumption.ThemotionlawofthisrobotdiffersfromthatofotherrobotsanditsD-Hparameterscannotbedeterminedeasily.Twosolutionsareproposedtodealwiththisspecialstructure.Oneistotransformthestructureintoequivalentserialjoints(revoluteorprismaticjoints).ThenwecandeterminetheD-HparametersonebyonebasedonD-Htheory[2].Theotheristotransformclosedchainstoopenchainssothatwecancalculatetherelationshipbetweentheactiveandpassivejoints.Then,thecomplexstructureistransformedintosimpleserialstructure[3].Thefirstmethodneedstoanalyzethecharacteristicsofeveryjointinthishybridhinge,thusitissophisticatedanderror-prone[4].Meantime,inthesecondmethod,althoughageneraltheorytoanalyzeallclosedchainsisintroduced,thebreakdownstructureisnotpresentedandthistheoryisnotverifiedbyexperiments.Consideringthesetwomethods,itwillbeeasierforustodeterminetherelationshipbetweencoordinatesystemsofjointsifweknowthekinematicscharacteristicofthespecialstructure.Hencethemotioncharacteristicofthespecialstructureisanalyzedbasedontheclosed-to-openchaintheoryinthepaper.Thenthecoordinatesystemsaredirectlyestablishedateachactivejoint.Theadvantageofthemethodisthatitcanavoidjudgingthemotionofeachkinematicpairinthestructure[5].Inaddition


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机器人 运动学 分析 模拟 外文 文献 翻译 中英文
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
某小区无线网络覆盖方案Word文档下载推荐.docx
-
民事上诉状经典范本Word下载.docx
-
模板承重专项方案文档格式.docx
-
实验报告封面定稿模板Word文件下载.docx
-
中西广告语言差异的对比研究Word格式.docx
-
食品加工工艺论文Word下载.docx
-
模拟人生4秘籍大全整理docWord文件下载.docx
-
媒体广告报价单Word文档下载推荐.docx
-
某厂房钢结构施工组织设计文档格式.docx
-
世界风云演讲稿Word格式文档下载.docx
-
美的《主要业务分权手册》Word下载.docx
-
事业单位工作人员年度考核个人总结10篇Word文档下载推荐.docx
-
美术史试题Word格式.docx
-
手卫生责任书Word文档格式.docx
-
模拟卷十堰市工业经济发展情况汇报Word文件下载.docx
-
迷迭香种植及产品开发项目可行性研究报告Word文件下载.docx
-
数据库系统基础教程第九章答案Word文档下载推荐.docx
-
某宾馆给排水工程施工组织设计Word下载.docx
-
数学应用题资料Word下载.docx
