 16农大自动控制原理在线作业Word格式.docx
16农大自动控制原理在线作业Word格式.docx
- 文档编号:17642329
- 上传时间:2022-12-07
- 格式:DOCX
- 页数:10
- 大小:44.44KB
16农大自动控制原理在线作业Word格式.docx
《16农大自动控制原理在线作业Word格式.docx》由会员分享,可在线阅读,更多相关《16农大自动控制原理在线作业Word格式.docx(10页珍藏版)》请在冰豆网上搜索。
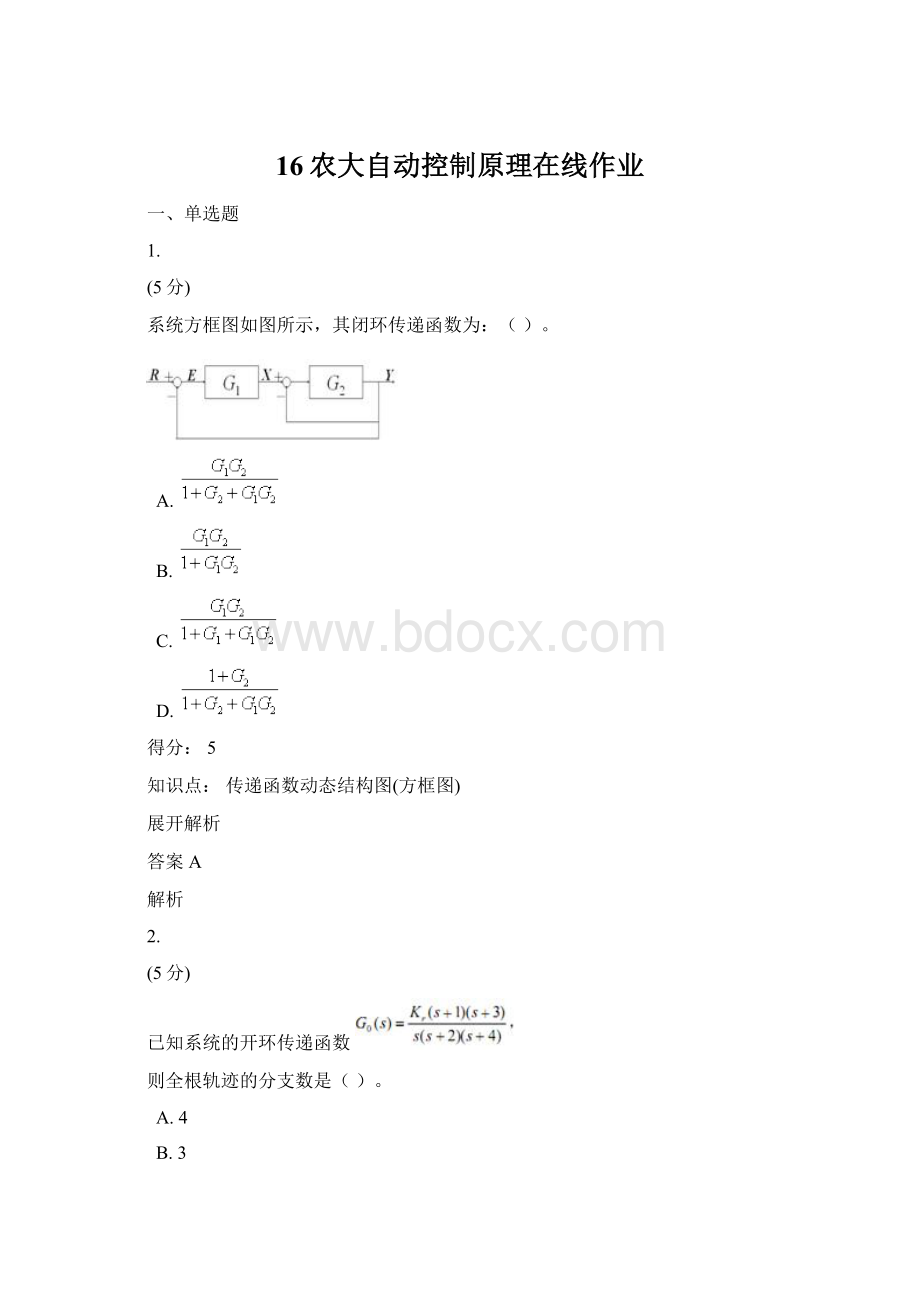
答案A
解析
2.
已知系统的开环传递函数
则全根轨迹的分支数是()。
A.4
B.3
C.2
D.1
根轨迹的绘制规则
答案B
3.
某系统闭环传递函数为:
,单位阶跃响应近似为()。
高阶系统的动态响应
4.
根轨迹法是利用()在s平面上的分布通过图解的方法求取()的位置。
A.开环零、极点;
闭环零点
B.闭环零、极点;
开环零点
C.开环零、极点;
闭环极点
D.闭环零、极点;
开环极点
根轨迹概念
答案C
5.
图示曲线是开环传递函数为()的系统的根轨迹。
6.
利用近似折线法绘制二次振荡环节的Bode图时在()情况下可以不进行误差修正。
A.0<
ξ1
B.ξ>
?
C.<
ξ<
D.ξ>
1
频率特性G(jω)的对数坐标图(Bode图)
7.
下列各个量中,反映系统快速性的量是()。
A.超调量
B.谐振频率
C.?
稳态误差
D.调整时间?
频率特性与系统性能的关系
答案D
8.
控制系统的输入输出描述利用的数学模型是()。
A.传递函数
B.高阶微分方程
C.高阶多项式方程
D.一阶微分方程
控制系统的微分方程
9.
Bode图与Nyquist图的对应关系为()。
A.Nyquist图上的单位园对应Bode图上的1dB线
B.Nyquist图上的单位园对应Bode图上的-180°
线
C.Nyquist图上的负实轴对应Bode图上的-180°
D.Nyquist图上的负实轴对应Bode图上的1dB线
利用频率特性分析系统的稳定性
10.
高阶系统时域单位阶跃响应是由稳态响应和()组合而成。
A.一阶模态、二阶模态
B.衰减响应
C.极点模态、零点模态
D.不衰减响应
11.
下列说法正确的是()。
A.对数频率特性的正频与负频部分关于ω轴对称
B.逆因子的对数频率特性关于实轴对称
C.频率特性极坐标图的正频与负频部分关于实轴对称
频率特性G(jω)的极坐标图(Nyuist图)
12.
已知系统劳斯表如图,则系统在右半s平面的特征根数为()。
A.2个
B.4个
C.1个
D.3个
稳定性及代数判据
13.
在下列说法中正确的是()。
I根轨迹的点必定满足幅值条件
II根轨迹的点不一定满足幅值条件
III根轨迹的点必定满足相角条件
IV根轨迹的点不一定满足相角条件
A.只有I和III正确
B.只有II和III正确
C.只有II和IV正确
D.只有I和IV正确
14.
控制系统的主要稳态性能指标是()。
A.?
稳态误差?
B.?
相位裕量
上升时间
D.?
谐振峰值
15.
A.剪切频率
B.振荡次数?
C.幅值裕量
D.谐振峰值
16.
自动控制系统的()是系统工作的必要条件。
A.动态特性
B.不稳定性
C.稳定性
D.稳态特性
对控制系统的性能要求
17.
已知单位负反馈系统的开环传函为
,使系统稳定的K值的范围是()。
18.
系统方框图如图所示,系统的稳态误差系数Kp、Kv、Ka为(),其中G1(s)=10/s(s+5),G2(s)=1/(+1)。
A.∞,2,0
B.20,2,0
C.0,0,0
D.∞,20,2
稳态精度分析
19.
开环传递函数为
的系统的根轨迹与虚轴的交点为()。
A.±
B.±
C.±
D.±
20.
相角条件是全根轨迹存在的()。
A.既非充分又非必要条件
B.充分条件
C.充要条件
D.必要条件


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 16 农大 自动控制 原理 在线 作业
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
三态变化习题.doc
-
八年级物理上册第四章《光现象》单元检测题).doc
-
初三物理第一轮总复习(全讲全练).doc
-
关于声速计算题专题训练(附答案).doc
-
初中物理电流和电路教学设计.doc
-
初中物理人教版八下《运动和力》单元测试.doc
-
初二物理压强典型例题解析.doc
-
数学国培心得体会.docx
-
上海中考物理二模汇编电学实验专题.docx
-
声现象知识点总结(全).doc
-
八年级物理下册《力》同步练习题及答案.doc
-
初中8年级滑轮组练习题与解析.docx
-
初中物理磁场试题.doc
-
几种常见气体的验证.docx
-
初中物理公式一览表.doc
-
初二物理常见的光学仪器测试题(含答案).doc
-
上海初二下学期期中物理测试.doc
-
水土保持规划设计讲义.docx
-
八年级物理下册期中试卷.doc
