 1410 天体的运动与能量要点Word格式.docx
1410 天体的运动与能量要点Word格式.docx
- 文档编号:17014649
- 上传时间:2022-11-27
- 格式:DOCX
- 页数:7
- 大小:35.65KB
1410 天体的运动与能量要点Word格式.docx
《1410 天体的运动与能量要点Word格式.docx》由会员分享,可在线阅读,更多相关《1410 天体的运动与能量要点Word格式.docx(7页珍藏版)》请在冰豆网上搜索。
v≥
2GM
=2Rg=11.2R
我们称v=11.2km/s为第二宇宙速度,它恰为第一宇宙速度为2倍。
另外在上面的二体系统中,由于万有引力属于有心力,所以对m而言,遵循角动量守恒
mv⋅r=恒量
或mvr⋅sinθ=恒量
θ是v与r方向的夹角。
它实质可变换得到开普勒第二定律,即行星与恒星连
中学学科网学科精品系列资料WWW.ZXXK:
COM版权所有@中学学科网
线在相等时间内扫过面积等。
4.10.2、天体运动的轨道与能量
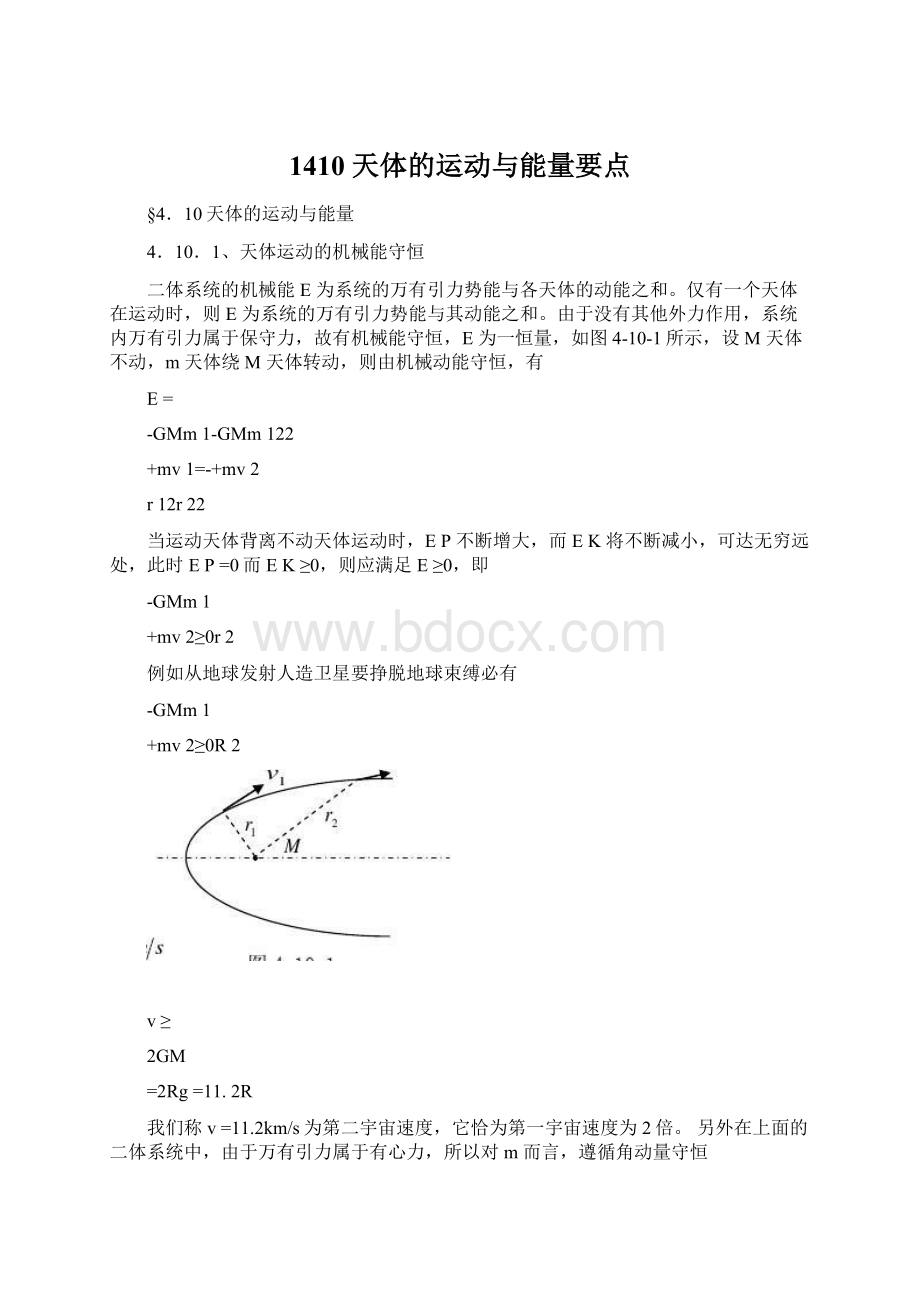
若M天体固定,m天体在万有引力作用下运动,其圆锥曲线可能是椭圆(包括圆)、抛物线或双曲线。
i)椭圆轨道
如图4-7-1所示,设椭圆轨道方程为
x2
y2
a2+b2=1(a>
b)
则椭圆长,短半轴为a、b,焦距c=a2-b2
,近地
点速度v1,远地点速度v2,则有
12mv2GMm12GMm1-a-c=2mv2-a+c
mv1(a-c=mv2(a+c
或由开普勒第二定律:
12v(a-c=1
12v2(a+c
可解得
⎧⎪⎨v1=a+cGM/(a-c⋅a
⎪⎩v2=a-cGM/(a+c⋅a
代入E得
E=-
GMm
2a<
ii抛物线设抛物线方程为
y=
Ax2
太阳在其焦点(
0,
1
4A)处,则m在抛物线顶点处能量为
1GMm122mv0-=mv0-4AGMm
122(4A
可以证明抛物线顶点处曲率半径
ρ=
112
mv0/ρ=GMm/(2
2A,则有4A得到
v0=AGM
抛物线轨道能量
E=m⋅(8AGM-4AGM=0
2
iii)双曲线设双曲线方程为
xy-=122ab
22
焦距c=a+b,太阳位于焦点(C,0),星体m在双曲线正半支上运动。
如图4-10-3所示,其渐近线OE方程为y=bx/a,考虑m在D处与无穷远处关系,有
1GMm122mv0-=mv∞2c-x2
考虑到当r→∞,运动方向逼近渐近线,焦点与渐近线距FC为
FC=cb/a2+b2=b
故有
11
vD(c-a=v∞⋅b22或mvD(c-a=mv∞⋅b
联解得
⎧v∞=GM/a⎪⎨bGMv=⎪D
c-aa⎩
双曲线轨道能量
>
02a
小结
02a椭圆轨道
E=0抛物线轨道E=
GMm>
02a双曲线轨道
以下举一个例子
质量为m的宇宙飞船绕地球中心0作圆周运动,已知地球半径为R,飞船轨道半径为2R。
现要将飞船转移到另一个半径为4R的新轨道上,如图4-10-4所示,求
(1)转移所需的最少能量;
(2)如果转移是沿半椭圆双切轨道进行的,如图中的ACB所示,则飞船在两条轨道的交接处A和B的速度变化∆vA和∆vB各为多少?
解:
(1)宇宙飞船在2R轨道上绕地球运动时,万有引力提供向心力,令其速度为v1,乃有
GMmmv1=2
2R(2R故得
4RA
B
GMv1=
2R
图4-10-4
此时飞船的动能和引力势能分别为
Ek1=Ep1
1GMm2mv1=24RGMm=-
所以飞船在2R轨道上的机械能为
E1=Ek1+Ep1=-
GMm4R
同理可得飞船在4R轨道上的机械能为
以两轨道上飞船所具有的机械能比较,知其机械能的增量即为实现轨道转移所需的最少能量,即
∆E=E2-E1=
GMm8R
(2)由
(1)已得飞船在2R轨道上运行的速度为
v1=
GM2R
同样可得飞船4R轨道上运行的速度为
v2=
GM4R
'
v和v2。
设飞船沿图示半椭圆轨道ACB运行时,在A、B两点的速度分别为1
则由开普勒第二定律可得
⋅2R=v2'
⋅4Rv1
又由于飞船沿此椭圆轨道的一半运行中机械能守恒,故应有
1GMm1GMm
2-'
2-mv1=mv2
22R24R
联立以上两式解之可得
=v1
2GMm
3R
中学学科网学科精品系列资料WWW.ZXXK.COM上中学学科网,下精品学科资料′v2=12GMm23R故得飞船在A、B两轨道交接处的速度变化量分别为4GM′vA=v1v1=312R2GM′vB=v2v2=134R例如:
三个钢球A、B、C由轻质的长为l的硬杆连接,竖立在水平面上,如a=52l8处有一图4-10-5所示。
已知三球质量mA=2m,mB=mc=m,距离杆面竖直墙。
因受微小扰动,两杆分别向两边滑动,使B球竖直位置下降。
致使C球与墙面发生碰撞。
设C球与墙面碰撞前后其速度大小不变,且所有摩擦不计,各球的直径BAC都比l小很多,求B球落地瞬间三球的速度大小。
a解:
(1)球碰墙前三球的位置图4-10-5视A、B、C三者为一系统,A、C在水平面上滑动时,只要C不与墙面相碰,则此系统不受水平外力作用,此系统质心的水平坐标不发生变化。
以图4-10-6表示C球刚好要碰墙前三球的位置,以a表示此时BC杆与水平面间的夹角,则AB杆与水平面间的夹角也为a,并令BA杆上的M点与系统质心的水平坐标相同,则应有mAAMcosa=mBMBcosa+mCBCcosaMB=1lAB=44故得①中学学科网学科精品系列资料WWW.ZXXK:
COM版权所有@中学学科网
中学学科网学科精品系列资料WWW.ZXXK.COM上中学学科网,下精品学科资料由上述知M点的水平坐标应与原来三秋所在的BM位置的水平坐标相同,故知此刻M点与右侧墙面的距离即为a,即M点与C球的水平距离为vBvAA图4-10-7αCvCa,由此有MBcosa+BCcosa=a,即l52cosa+lcosa=l48。
cosa=22,故有a=45o由上式解得②
(2)求三球碰墙前的速度由于碰墙前M点的水平坐标不变,则在A、C沿水平面滑动过程中的任何时刻,由于图中的几何约束,C点与M点的水平距离总等于A点与M点的水平距55离的3倍,可见任何时刻C点的水平速度大小总为A点水平速度大小的3倍。
以vA、vB、vC分别表示图5-2-2中三球的速度,则有vC=5vA3③又设vB沿BC方向的分量为vBC,则由于vB和vC分别为杆BC两端的小球速度,则此两小球速度沿着杆方向的投影应该相等,即vBC=vCcosa。
再设vB沿BA方向的分量为vBA,同上道理可得vBA=vAcosa注意到BA与BC两个方向刚好互相垂直,故得vB的大小为2222vB=vBC+vBA=vC+vAcosa以②③两式带入上式,乃得中学学科网学科精品系列资料WWW.ZXXK:
中学学科网学科精品系列资料WWW.ZXXK.COM上中学学科网,下精品学科资料vB=17vA9④由于系统与图5-2-1状态到图5-2-2状态的机械能守恒,乃有mBgl=mBglsina+111222mAvA+mBvB+mCvC222。
以①~④式代入上式。
解方程知可得vA=32(1gl102⑤(3)求C球在刚碰墙后三球的速度如图4-10-8所示,由于C球与墙碰撞,导致C球的速度反向而大小不变,由于杆BC对碰撞作用力的传递,使B球的速度也随之变化,这一变BC化的结果是:
球速度沿CB方向的分量v′与CBv′BCBv′BAvAA′vC图4-10-8αC球速度沿CB方向的分量相等,即′v′=vCcosa=vCcosaBC⑥由于BC杆只能传递沿其杆身方向的力,B球在垂直于杆身方向故(即BA方向)的速度不因碰撞而发生变化,A球的速度也不因碰撞而发生变化,即其仍为vA。
BA故得此时B球速度沿BA方向的分量v′满足v′=vAcosa,BA乃得刚碰撞后B球速度大小为22v′=v′2+v′2=vC+vA=BBCBA⑦17vA9⑧(4)求B球落地时三球的速度大小中学学科网学科精品系列资料WWW.ZXXK:
中学学科网学科精品系列资料WWW.ZXXK.COM上中学学科网,下精品学科资料碰撞后,三球速度都有水平向左的分量,可见此后系统质心速度在水平方向的分量vMx应该方向向左,且由于此后系统不受水平外力,则vMx应维持不变。
由上解得的三球速度,可得vMx应该满足′(mA+mB+mCvMx=mAvA+mB(v′cosa+v′sina+mCvC。
BCBA以③、⑤、⑥、⑦诸式代入上式可解得vMx=51vA=15(22gl48⑨当B球落地时,A、B、C三小球均在同一水平线上,它们沿水平方向的速度相等,显然,这一速度也就是系统质心速度的水平分量vMx。
而B小球刚要落地时,A、C两球的速度均沿水平方向(即只有水平分量),B球的速度则还有竖直分量,以vB落表示此刻B球速度的大小。
则由图4-10-8所示的状态到B小球刚要落地时,系统的机械能守恒,由此有111111222′mAvA+mBv′2+mCvC2+mBglsina=mAvMx+mB2+mCvMxBvB落222222。
以⑨、⑧、⑤各式代入上式可解得1(38+452glvB落=8⑩综合上述得本题答案为:
当B小球刚落地时,A、B、C三球的速度大小分别为11115(22gl(38+452gl15(22gl8、8、和8。
中学学科网学科精品系列资料WWW.ZXXK:


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 1410 天体的运动与能量要点 天体 运动 能量 要点
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
气相色谱计量实用标准.docx
-
强夯资料.docx
-
汽车维修个人工作计划doc.docx
-
钦州市总体规划.docx
-
浅谈行业网站运营模式深入浅出剖析行业网站.docx
-
青年教师成长心得感悟发言稿范文精选5篇.docx
-
强烈推荐白领营养早餐项目创业计划.docx
-
秋七年级英语上册Unit3Isthisyourpencil早读手册素材新版人教新目标版word版doc.docx
-
亲子活动总结.docx
-
青少年科学素养测评小学试题8.docx
-
全大学英语一Unit 1 Growing Up教案新部编本.docx
-
秋统编版八年级语文上册第3单元第912课精品教学设计.docx
-
全国七月高等教育自学考试大学语文试题.docx
-
全自动剪板机的plc控制系统设计secret.docx
-
人防物业管理方案.docx
-
人教版初中英语单词按词性分类表.docx
-
人教版九年级上册语文测试题.docx
-
路径识别双机备.docx
-
拟行路难教案反思.docx
