 四相步进电机定位控制系统Word文件下载.docx
四相步进电机定位控制系统Word文件下载.docx
- 文档编号:16892553
- 上传时间:2022-11-26
- 格式:DOCX
- 页数:29
- 大小:540.05KB
四相步进电机定位控制系统Word文件下载.docx
《四相步进电机定位控制系统Word文件下载.docx》由会员分享,可在线阅读,更多相关《四相步进电机定位控制系统Word文件下载.docx(29页珍藏版)》请在冰豆网上搜索。
225°
270°
315°
电流方向
A线圈
B线圈
A→A′
A←A′
B→B′
B←B′
端口信号
0001
0011
0010
0110
0100
1100
1000
1001
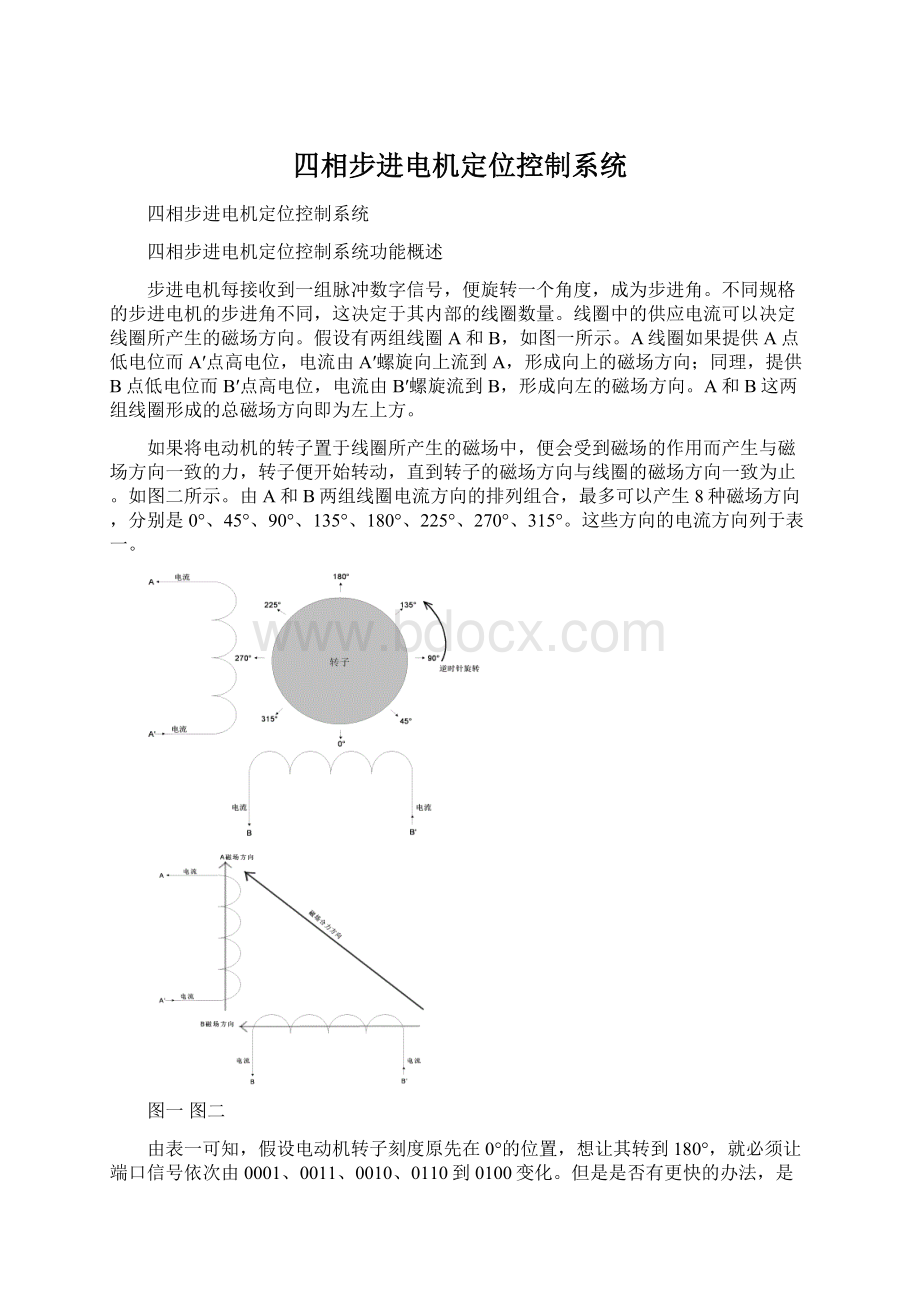
1-相激磁法:
当目标角度是90的整数倍时,采用这种方法。
例如要从0转到270,只要让端口信号的顺序为0000,0001,0010,0100,1000即可。
2-相激磁法:
当目标角度是45而非90的整数倍时,可采用这种方法。
例如要从0转到225,只要让端口信号的顺序为0000,0011,0110,1100即可。
1-2-相混合激磁法:
按照表二中所列的信号顺序。
表二:
四相步进电机3种不同激磁方式对应提供的端口信号
1-相激磁
√
2-相激磁
1-2-相激磁
四相步进电机定位控制系统的VHDL源码及注释
--四相步进电机示例程序
libraryIEEE;
useIEEE.std_logic_1164.all;
useIEEE.std_logic_arith.all;
useIEEE.std_logic_unsigned.all;
entitystep_motoris
port(reset:
inSTD_LOGIC;
--系统复位信号
dir:
inSTD_LOGIC;
--步进电机正反转方向控制开关(0:
逆时针;
1:
顺时针)
clk:
--系统时钟(FPGA内部提供的4MHz的时钟信号)
ini:
--使能开关
manner:
inSTD_LOGIC_VECTOR(1downto0);
--激磁方式的选择开关(00:
自动选择激磁方式;
--01:
1-相激磁;
10:
2-相激磁;
11:
1-2-相激磁)
angle:
inSTD_LOGIC_VECTOR(7downto0);
--步进角的倍数设定输入键
baBA:
outSTD_LOGIC_VECTOR(3downto0));
--步进电机的状态输出
endstep_motor;
architecturestepmotor_archofstep_motoris
signalcount:
INTEGERrange0to7;
--内部电路的计数累加器,用于产生输出所需对应的状态
signalcntInc:
INTEGERrange-2to2;
--设定累加器所需的累加/减计数值
signalcntIni:
INTEGERrange-1to0;
--设定累加器所需的计数初值
signalangleDnCount:
INTEGERrange255downto0;
--设定步进角所需的计数次数
signalangleDnCntDec:
INTEGERrange2downto1;
--设定步进角所需的累减计数值
begin
--步进电机方向设定电路模块
该模块的功能是设定步进电机的旋转方向(顺时针或逆时针),并设定电机在顺时针转动或逆时针转动时所需的初值与累加/减值。
process(dir,manner,angle)
begin
ifdir='
0'
then
casemanneris
when"
01"
=>
--1-相激磁
cntIni<
=0;
cntInc<
=2;
angleDnCntDec<
10"
--2-相激磁
=-1;
11"
--1-2-相激磁
=1;
whenothers=>
--自动选择激磁方式
--angle为偶数即角度为90的倍数时,采用1-相激磁,否则2-相激磁
if(angle(0)='
1'
)then--2-相激磁
cntIni<
else--1-相激磁
endif;
endcase;
else
=-2;
--"
;
--1-2-相激磁
--自动选择激磁方式
if(angle(0)='
endprocess;
--步进电机步进移动与定位控制电路模块
该模块的主要功能是利用ini(使能开关),将数值传到该模块中,并配合输入的clk(系统时钟)作为同步控制信号,进行步进电机的步进移动与定位控制。
counting_reset:
process(reset,ini,angle,clk)
ifreset='
then--复位低电平有效
count<
angleDnCount<
elsifclk'
eventandclk='
then
ifini='
then--使能高电平有效
=0+cntIni;
=CONV_INTEGER(angle);
count<
=count+cntInc;
ifangleDnCount>
angleDnCntDecthen--判断是否已到达设定位置
angleDnCount<
=angleDnCount-angleDnCntDec;
=0;
--编码输出电路模块
该模块的功能是将count与angledncount产生的数值经过编码,并利用baBA输出连线信号,将结果输出显示。
baBA<
="
0000"
whenangleDnCount=0else
"
0001"
whencount=0else
0011"
whencount=1else
0010"
whencount=2else
0110"
whencount=3else
0100"
whencount=4else
1100"
whencount=5else
1000"
whencount=6else
1001"
--whencount>
=7;
endstepmotor_arch;
四相步进电机定位控制系统的模块图
四相步进电机定位控制系统的仿真结果
⑴自动模式,顺时针,旋转角为45*11的情况:
⑵自动模式,顺时针,旋转角为45*16的情况:
⑶1-相激磁,逆时针,旋转角为45*7的情况:
⑷1-相激磁,顺时针,旋转角为45*7的情况:
⑸2-相激磁,逆时针,旋转角为45*17的情况:
⑹2-相激磁,逆时针,旋转角为45*17的情况:
⑺1-2-相激磁,顺时针,旋转角为45*11的情况:
⑻1-2-相激磁,顺时针,旋转角为45*8的情况:
直流电机速度控制系统
直流电机速度控制系统功能概述
驱动电路称为桥式驱动或是H型驱动电路(如右图所示),采用的控制方法称为脉冲宽度调制法(PWM),即利用晶体管on-off(导通-不导通)进行控制的方法。
使用FPGA纯数字式的控制时,假设电机速度从静止开始加速,首先Q1、Q2必须维持导通一段时间,此时电机所承受的电压约为供电电压U,称之为强加速。
待速度接近目标速度时,加速可以减缓,此时Q1、Q2和Q3、Q4轮流导通,只是Q1、Q2在一个周期内所导通的时间ton比Q3、Q4导通的时间toff长一些,此时称为弱加速。
任何时候,电机所承受的平均电压U0可表示为U0=U*(ton-toff)(ton+toff)。
如果速度已经达到目标,便可以调整ton和toff的时间比例使之相等,此时平均电压为零,称为定速控制。
由此可知,平均电压若为正值,是加速控制;
负值时是减速控制;
为0时即达到匀速。
当然,还涉及到确定电机目前的速度是多少,比目标速度快还是慢,也就是速度检测的问题,常用的办法是光遮断法,在此就不再论述了。
在程序仿真时只简单的输入固定的速度模拟一下。
直流电机速度控制系统的VHDL源码及注释
entitymotorctrlis
port(clk:
--FPGA内部提供的4MHZ的时钟信号
reset:
--系统内部自复位信号
speed_now:
--速度检测编码器检测到的当前速度
target_speed:
--设定电机预定达到的目标速度
th_speed:
--设定电机进入弱加速时的临界速度差值
pwme:
outSTD_LOGIC);
--脉宽调制的输出,负责控制电机转动的信号
end;
architecturemotorctrl_archofmotorctrlis
--definethesignal_structureandflowofthedevice定义内部信号
signalcnt125:
INTEGERrange0to124;
--125个时钟的计数器
signalcnt375:
INTEGERrange0to374;
--375个时钟的计数器
signalcnt500:
INTEGERrange0to499;
--500个时钟的计数器
signaldth:
STD_LOGIC_VECTOR(7downto0);
--设定电机进入弱加速时的临界值(dth=target_speed-th_speed)
signalpwm:
STD_LOGIC;
--负责产生脉宽调制的信号,提供正确的输出
--相位类型,负责产生正反转两种状态信号,用来控制电机的加速和减速
phase有2种状态:
状态0:
phase<
=phb1,电机正转(加速状态);
状态1:
=phb2,电机反转(减速状态)。
typephase_typeis(phB1,phB2);
signalphase:
phase_type;
--------------------------------------------
--速度类型,负责产生加速、弱加速、减速与定速4种状态信号,以控制电机的转速
speeding4种状态:
speeding<
=upa,电机进行加速动作;
状态1:
=upb,电机进行弱加速动作;
状态2:
=dn,电机进行减速动作;
状态3:
=final,电机进行定速动作;
typespeeding_typeis(UPA,UPB,Dn,final);
signalspeeding:
speeding_type;
-----------------------------------------------
--速度控制模块
该模块实现下列的控制功能:
1)如果speed_now=target_speed,则定速控制,即ton=toff=ktclk,on-off的时间均等于clk的k倍周期时间;
2)如果speed_now>
=target_speed–th_speed,则进行弱加速控制,ton=(3/4)ktclk,toff=(1/4)ktclk;
3)如果speed_now<
target_speed–th_speed,进行强加速控制,pwme=1;
4)如果speed_now>
target_speed,则减速控制,ton=(1/4)ktclk,toff=(3/4)ktclk;
另外,方向控制通过将pwme信号的输出反向。
根据上面的分析,需要3个分频器,分别产生ktclk,(1/4)ktclk和(3/4)ktclk的周期信号。
假设时钟周期tclk为10MHz,电机频率为20kHz,因此k=10MHz/20kHz=500,(1/4)k=125,(3/4)=375,这也就是定义cnt125,cnt375,cnt500三个计数器的原因。
peeding_machine:
process(reset,clk)
ifreset='
then--复位高电平有效
speeding<
=UPA;
dth<
00000000"
elsif(clk'
)then
=target_speed-th_speed;
--弱加速的临界值
casespeedingis--速度控制状态机
whenUPA=>
--情况1
if(speed_now=target_speed)then
speeding<
=final;
elsif(speed_now>
target_speed)then
speeding<
=Dn;
elsif(speed_now<
dth)then
=dth)and(speed_now<
=UPB;
endif;
whenUPB=>
--情况2
if(speed_now=target_speed)then
whenDn=>
--情况3
elsif(speed_now>
speeding<
whenfinal=>
--情况4
if(speed_now>
elsif(speed_now>
elsif(speed_now=target_speed)then
elsif(speed_now<
endif;
null;
endprocess;
--相位控制模块
该模块具有下列控制功能:
1)如果希望正向转动(即Q1,Q2导通),则使用状态0:
phb1;
2)如果希望反向移动(即Q3,Q4导通),则使用状态1:
phb2;
上面的速度设定模块只是对有关的输入信号进行判断,告知FPGA用何种模式进行速度控制,并不产生输出信号(pwm)。
因此,必须设计第二个状态判别器“phase”,负责计数与产生pwm(脉宽调制)信号。
phase相位控制器的设计原理如下:
phb1状态为Q1,Q2开启(即pwme=1),而Q3,Q4关闭(即pwme=0)的状态,phb2状态为Q1,Q2关闭,而Q3,Q4开启。
三极管的开关时间依据所激活的计数器而定。
phase_machine:
cnt500<
cnt375<
cnt125<
pwm<
='
pwme<
phase<
=phB1;
=pwm;
casephaseis
whenphB1=>
if(speeding=UPA)then
cnt375<
=374;
cnt125<
=124;
cnt500<
=499;
pwm<
--加速状态pwm恒为1,不用计数器
elsif(speeding=UPB)then
=cnt375-1;
--弱加速状态pwm输出为1是375个时钟,0为125个时钟
elsif(speeding=Dn)then
--减速状态pwm输出0是375个时钟,1为125个时钟
elsif(speeding=final)then
=cnt500-1;
--匀速状态下,pwm输出1和0的时间均为500个时钟
else
cnt500<
cnt375<
cnt125<
if(cnt375=0orcnt500=0)then--计数器记满后,相位转换
cnt500<
cnt375<
phase<
=phB2;
whenphB2=>
=cnt125-1;
=


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 步进 电机 定位 控制系统
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
电子信息学院青年志愿者分队白皮书.docx
-
高考复习专题一 名词 Microsoft Word 文档.docx
-
二级建造师《建筑实务》桉例练习题115.docx
-
钢铁表面处理知识汇总doc.docx
-
反兴奋剂准入考试题库完整.docx
-
高考地理纠错典例自然地理.docx
-
二年级奥数比谁的眼力好.docx
-
防火门安装施工方案 2.docx
-
房屋租赁合同附件2份.docx
-
高考化学人教经典版大一轮复习 选修5 有机化学基础选55a 第5节 醛羧酸酯习题.docx
-
第五届校园之星颁奖词.docx
-
服务方案进度计划质量保障措施范文4篇.docx
-
非谓语动词综合一览表.docx
-
高考全国卷II理综物理试题及详细解析.docx
-
二年级品德与生活.docx
-
方向盘套的研制开发与制造业务可行性研究报告.docx
-
对施工单位的管理办法.docx
-
东北师范大学幼儿园艺术教育活动及设计16秋在线作业1满分标准答案.docx
-
高考历史苏版二轮练习214近代欧洲工人争取民主权利.docx
