 马铃薯收获机振动部件运动学分析报告Word文档格式.docx
马铃薯收获机振动部件运动学分析报告Word文档格式.docx
- 文档编号:16891843
- 上传时间:2022-11-26
- 格式:DOCX
- 页数:13
- 大小:276.41KB
马铃薯收获机振动部件运动学分析报告Word文档格式.docx
《马铃薯收获机振动部件运动学分析报告Word文档格式.docx》由会员分享,可在线阅读,更多相关《马铃薯收获机振动部件运动学分析报告Word文档格式.docx(13页珍藏版)》请在冰豆网上搜索。
①
求解角
:
将①式,整理为:
②
两端各自点积:
由上式整理得:
分别令:
则上式可整理为
解之得:
将①式整理为
③
同理,可解得:
其中,
(2)l3杆的角速度,将②式对时间求导可得:
④
将两边同时用e2点积,消去θ2得:
其中
、
即
,整理得:
同理可得:
挖掘铲末端D点是绕定轴转动的刚体上的一点,所以,D点的切向速度分别可以表示为:
(3)l3杆的角加速度,对④式取t的导数:
⑤
上式中由于l1为匀速转动,故角加速度为0,即
。
用
点积⑤式:
整理得
同理,用
点积⑤式,可消去
(4)挖掘铲末端D点是绕定轴转动的刚体上的一点,所以,D点的加速度分别可以表示为:
D点的切向(转动加速度):
法向(向心加速度):
合加速度:
(5)由图中的几何关系得D点的位移轨迹方程
也可进一步整理为
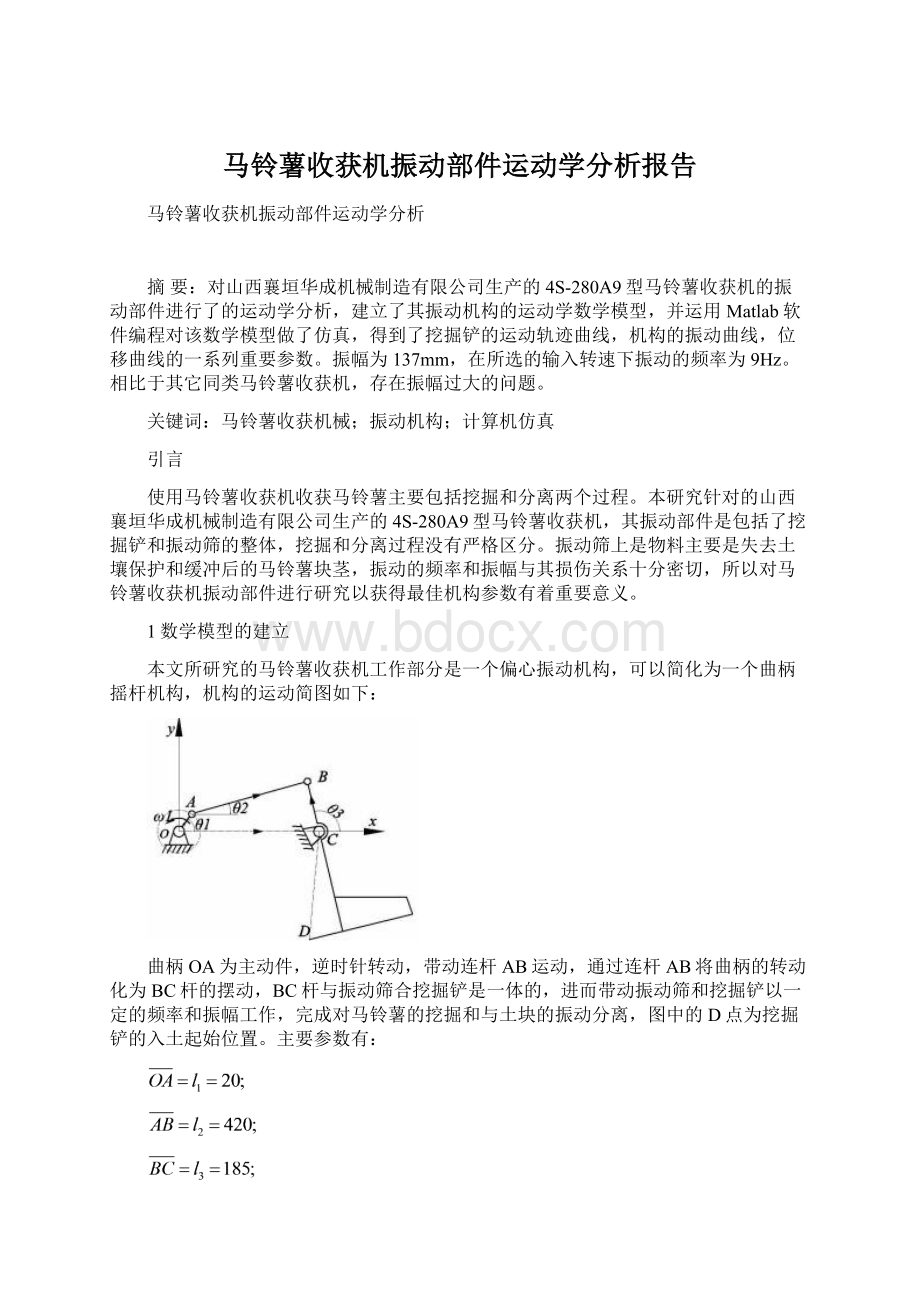
2运动学仿真
对以上数学模型编制Matlab程序,(程序清单附后),其中设经减速器输入曲柄的转速为540r/min,曲柄逆时针匀速转动,仿真时间为曲柄的两个转动周期。
仿真程序的运行结果如下:
1.挖掘铲末端D点的位移函数曲线:
图1:
挖掘铲末端D点的位移函数曲线
2.D点的切向速度曲线:
图2:
D点的切向速度曲线
3.D点的切向加速度、向心加速度和总加速度
图3a:
D点的切向加速度
图3b:
D点的向心加速度
图3c:
D点的加速度
4.D点的位移轨迹方程
图4a:
D点在X坐标方向的位移轨迹
图4b:
D点在Y坐标方向的位移轨迹
由图1可知D点的运动范围为283~557mm,运动的周期是由输入的曲柄转速决定的,约为0.11s,对以上仿真结果的分析可知,所研究的马铃薯收获机其振动参数为:
对比其它同类的马铃薯收获机械来看,存在着振幅过大的问题,它同类的马铃薯收获机械一般振幅为30mm。
过大的振幅会增大伤薯率,不仅不利于生产,还会对操作者的健康造成重大影响,应进一步对其结构参数进行优化。
3总结
本研究将马铃薯收获机的偏心振动机构转化为一个曲柄摇杆机构,并用矢量法建立了该曲柄摇杆机构的运动学数学模型。
该数学模型可以用来分析不同的转速,以及不同的曲柄长度(即,偏心距)对机构振动参数的影响。
在对马铃薯收获机振动部件的进一步分析,以及参数优化等研究中有重要的应用价值。
附录(程序清单):
1、D点的位移函数曲线
%2010年11月20日。
%D点的位移函数曲线
clear;
clc;
closeall;
%基本参数
L1=20;
L2=420;
L3=185;
L4=460;
L5=202;
%各杆的长度
w=540;
%曲柄角速度为540r/min,匀速转动
w1=w*2*pi/60;
%将角速度化为弧度单位rad/s
T=2*pi/w1;
%计算曲柄的转动周期
t=0:
0.0001:
2*T;
%设置仿真时间为2个周期。
theta1=w1*t;
%曲柄和x轴的夹角θ1是时间t的函数
M=2*L1*L3*sin(theta1);
N=2*L3*(L1*cos(theta1)-L4);
P=L2^2-L1^2-L3^2-L4^2+2*L1*L4*cos(theta1);
BB=M+sqrt(M.^2+N.^2-P.^2);
CC=N-P;
A=BB./CC;
B=atan(A);
B=-2*B;
%B即θ3
alfa=21*180/pi;
theta5=B+pi-alfa;
%L5和x轴的夹角θ5
Yd=(L4+L5*sin(theta5)).*tan(theta5)-L4*tan(theta5);
plot(t,Yd,'
LineWidth'
2.5);
gridon;
title('
D点的位移曲线'
'
FontSize'
28,'
FontName'
汉仪粗宋简'
);
xlabel('
Time/秒'
24,'
Times'
ylabel('
D点位移/mm'
2、D点的切向速度曲线
%2010y11m20d
%D点的速度曲线(切向)
%已知刚体的转动角速度,求
%绕定轴转动刚体上的一点,其运动情况。
theta3=-2*B*pi/180;
%B即θ3/2
Md=2*L1*L2*sin(theta1);
Nd=2*L2*(L4-L1*cos(theta1));
Pd=L3^2-L1^2-L2^2-L4^2+2*L1*L4*cos(theta1);
BBd=Md+sqrt(Md.^2+Nd.^2-Pd.^2);
CCd=Nd-Pd;
Ad=BBd./CCd;
Bd=atan(Ad);
theta2=2*Bd*pi/180;
%Bd即θ2/2
m3=theta1-theta2;
m33=theta3-theta2;
m2=theta1-theta3;
m22=theta2-theta3;
w3=(w1*L1*sin(m3))./(L3*sin(m33));
vd=w3.*L5;
%-------------------------------------------------------------------------
plot(t,vd,'
Time/s'
22,'
D点的切向速度(mm/s)'
3、D点的切向加速度、向心加速度和总加速度
%2010年12月7日
%D点的切向加速度和向心加速度,总加速度
L5=202;
%w0=w1/60*2*pi;
%角速度换算为rad/s
%杆BC的角速度
w2=(-1*w1*L1*sin(m2))./(L2*sin(m22));
%杆AB的角速度
%——————————————————————————————————
alfa3=(w1^2*L1*cos(m3)+(w2.*w2)*L2-((w3.*w3)*L3).*cos(m33))./(L3*sin(m33));
%BC杆角加速度方程
%--------------------------------------------------------------------------
alfa2=(-1*w1^2*L1*cos(m2)+(w3.*w3)*L3-((w2.*w2)*L2).*cos(m22))./(L2*sin(m22));
%AB杆角加速度方程
%————————————————————————————
%D点的切向速度
adt=alfa3.*L5;
%D点的切向加速度,即转动加速度
adn=vd.*w3;
%D点的向心加速度,即法向加速度
ad=sqrt(adt.^2+adn.^2);
%D点的合加速度
%---------------------以下绘图----------------------------
figure;
plot(t,adt,'
2.3);
D点的切向加速度(mm/s^2)'
plot(t,adn,'
r'
D点的向心加速度(mm/s^2)'
plot(t,ad,'
k'
D点合加速度(mm/s^2)'
%D点的位移轨迹方程,从表达式看是一个圆上的一部分。
%实际轨迹也是如此。
从CAD图中也可以看到。
B=-2*B*pi/180;
alfa=21*pi/180;
%---------------------------------------------------
XD=L4+L5*cos(theta5);
YD=-L5*sin(theta5);
%yd=sqrt(L5^2-(xd-L4)^2);
plot(t,XD,'
D点位移(X)/mm'
plot(t,YD,'
%title('
D点位移(Y)/mm'
plot(XD,YD,'
D点的轨迹曲线'
X坐标/mm'
D点轨迹曲线/mm'


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 马铃薯 收获 振动 部件 运动学 分析 报告
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
云平台培训心得体会.docx
-
运动会演讲稿13篇.docx
-
运营工作转正申请书.docx
-
在火电厂实习报告范文.docx
-
怎样写让同学们好好学习的建议书.docx
-
张家口市四年级上学期语文期末专项复习卷一拼音字词D卷.docx
-
长岭中心小学跳绳比赛活动方案.docx
-
招商手册范本.docx
-
照片上传网站详细需求分析.docx
-
浙江省单独考试招生文化考试语文试题卷.docx
-
支架搭设安全方案.docx
-
执行异议之诉中争议焦点为应否对标的物采取保全措施的应按非财产案件的标准计收诉讼费.docx
-
直销培训个人心得体会5篇1.docx
-
职工培训领导讲话稿.docx
-
制造业营销的五种战略.docx
-
质量月质量管理知识竞赛题库315题含答案.docx
-
中国残疾人社会救助发展性指标评价.docx
-
中国的航天.docx
-
中国古代文论.docx
