 大作业Word格式.docx
大作业Word格式.docx
- 文档编号:16886408
- 上传时间:2022-11-26
- 格式:DOCX
- 页数:36
- 大小:243.36KB
大作业Word格式.docx
《大作业Word格式.docx》由会员分享,可在线阅读,更多相关《大作业Word格式.docx(36页珍藏版)》请在冰豆网上搜索。
00w4L’4cosθ4-w1sinθ1
00w4L’4sinθ4-w1cosθ1
w2w1L1cosθ1
w3w1L1sinθ1
w4+w1w1L’1cosθ1+vsinθ1
L’1w1L’1sinθ1+vcosθ1
acx=w12L1cosθ1-w22L2cosθ2-a2L2sinθ2
acy=w12L1sinθ1-w22L2sinθ2+a2L2cosθ2
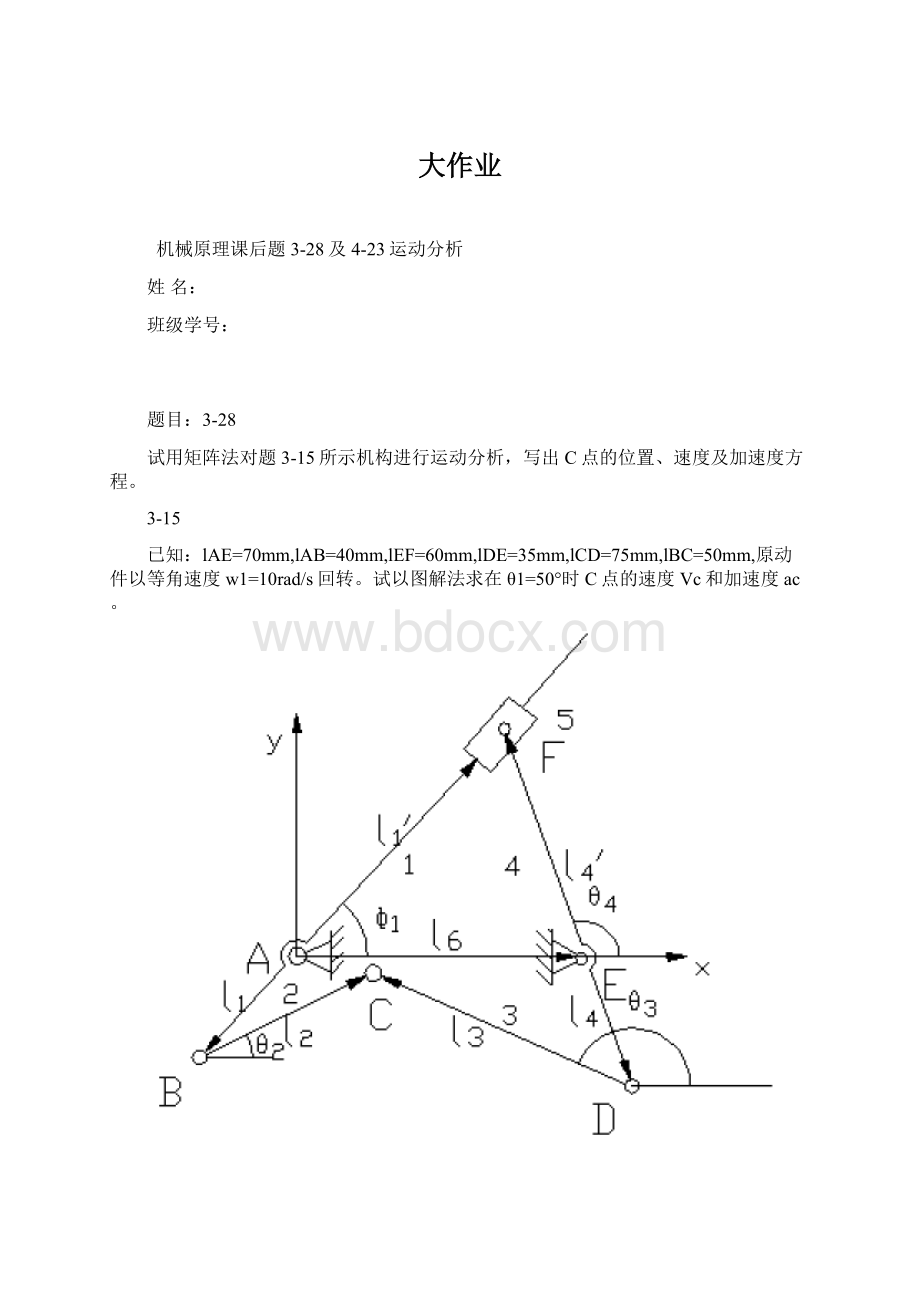
注意到,关于位置的四个方程组成的方程组是关于三角函数的非线性超越方程。
这里用牛顿——辛普森方法来求解。
第一步对位置方程进行求解:
用SolidWorks建模对机构中AF杆的极限位置进行分析,如图:
得出AF杆的运动范围是-57.91°
~59°
根据位置方程式编制如下rrrposi.m函数:
functiony=rrrposi(x)
%
%scriptusedtoimplementNewton-Raphsonmechodfor
%solvingnonlinearpositionofRRRbargroup
%Inputparameters
%x
(1)=theta-1
%x
(2)=theta-2guessvalue
%x(3)=theta-3guessvalue
%x(4)=theta-4guessvalue
%x(5)=l1
%x(6)=l2
%x(7)=l3
%x(8)=l4
%x(9)=l6
%x(10)=lAguessvalue
%x(11)=lB
%Outputparameters
%y
(1)=lA
%y
(2)=theta-2
%y(3)=theta-3
%y(4)=theta-4
theta2=x
(2);
theta3=x(3);
theta4=x(4);
lA=x(10)
epsilon=1.0E-6;
f=[x(6)*cos(theta2)-x(7)*cos(theta3)-x(8)*cos(pi+theta4)+x(5)...
*cos(x
(1)+pi)-x(9);
x(6)*sin(theta2)-x(7)*sin(theta3)-x(8)*sin(theta4+pi)+...
x(5)*sin(x
(1)+pi);
-x(11)*cos(theta4)+lA*cos(x
(1))-x(9);
-x(11)*sin(theta4)+lA*sin(x
(1))];
whilenorm(f)>
epsilon
J=[0-x(6)*sin(theta2)x(7)*sin(theta3)-x(8)*sin(theta4);
0x(6)*cos(theta2)-x(7)*cos(theta3)x(8)*cos(theta4);
cos(x
(1))00x(11)*sin(theta4);
sin(x
(1))00-x(11)*cos(theta4)];
dth=inv(J)*(-1.0*f);
lA=lA+dth
(1);
theta2=theta2+dth
(2);
theta3=theta3+dth(3);
theta4=theta4+dth(4);
f=[x(6)*cos(theta2)-x(7)*cos(theta3)-x(8)*cos(pi+theta4)+x(5)...
norm(f);
end;
y
(1)=lA;
y
(2)=theta2;
y(3)=theta3;
y(4)=theta4;
再进行数据输入,运行程序进行运算。
这里我们根据上面分析的θ1的极限位置取θ1的范围为40°
~55°
并均分成15个元素:
clc
clear
x1=linspace(40*pi/180,55*pi/180,15);
x=zeros(length(x1),11);
forn=1:
15
x(n,:
)=[x1(:
n)pi/68*pi/92*pi/340507535707560];
end
p=zeros(length(x1),4);
fork=1:
y=rrrposi(x(k,:
));
p(k,:
)=y;
>
p
p=
93.31490.71632.54551.5461
91.30710.70452.56171.5902
89.23870.69292.57861.6347
87.10760.68152.59631.6796
84.91130.67032.61471.7250
82.64630.65922.63391.7709
80.30860.64822.65391.8174
77.89310.63722.67471.8646
75.39300.62632.69651.9126
72.79980.61542.71921.9616
70.10190.60432.74312.0118
67.28330.59302.76832.0635
64.32170.58122.79502.1169
61.18350.56872.82372.1728
57.81530.55512.85492.2319
输出的P、矩阵的第二列到第四列分别是θ2、θ3、θ4的值,第一列是AF杆的长度L1’。
第二步进行速度计算:
根据速度方程式编写如下rrrvel.m函数:
functiony=rrrvel(x)
%x
(2)=theta-2
%x(3)=theta-3
%x(4)=theta-4
%x(5)=dtheta-1
%x(6)=l1
%x(7)=l2
%x(8)=l3
%x(9)=l4
%x(10)=l6
%x(11)=lA
%x(12)=lB
%Outoutparameters
%y
(1)=V
%y
(2)=dtheta-2
%y(3)=dtheta-3
%y(4)=dtheta-4
A=[-x(7)*sin(x
(2))x(8)*sin(x(3))x(9)*sin(pi+x(4))0;
x(7)*cos(x
(2))-x(8)*cos(x(3))-x(9)*cos(x(4)+pi)0;
00x(12)*sin(x(4))cos(x
(1));
00-x(12)*cos(x(4))sin(x
(1))];
B=[x(6)*sin(x
(1)+pi);
-x(6)*cos(x
(1)+pi);
x(11)*sin(x
(1));
-x(11)*cos(x
(1))]*x(5);
y=inv(A)*B;
根据第一步得到的数据进行数据输入,运行程序计算各速度值。
程序如下:
x2=[x1'
p(:
2)p(:
3)p(:
4)10*ones(15,1)40*ones(15,1)50*ones(15,1)...
75*ones(15,1)35*ones(15,1)70*ones(15,1)p(:
1)60*ones(15,1)];
q=zeros(4,15);
form=1:
y2=rrrvel(x2(m,:
q(:
m)=y2;
q
q=
1.0e+003*
Columns1through8
-0.0064-0.0062-0.0061-0.0061-0.0060-0.0059-0.0059-0.0058
0.00850.00890.00920.00960.01010.01050.01090.0114
0.02350.02370.02390.02410.02440.02470.02500.0255
-1.0578-1.0897-1.1226-1.1568-1.1926-1.2302-1.2704-1.3137
Columns9through15
-0.0058-0.0059-0.0060-0.0062-0.0065-0.0069-0.0078
0.01190.01250.01310.01390.01480.01590.0175
0.02590.02650.02720.02810.02920.03060.0327
-1.3610-1.4136-1.4734-1.5431-1.6273-1.7337-1.8767
程序运行得到q矩阵,第一行到第三行分别是a2、a3、a4的值,第四行是杆AF上滑块运动的速度,即F点的速度。
第三步进行加速度计算:
编写加速度计算函数rrra.m:
functiony=rrra(x)
%x
(1)=th1
%x
(2)=th2
%x(3)=th3
%x(4)=th4
%x(5)=dth1
%x(6)=dth2
%x(7)=dth3
%x(8)=dth4
%x(9)=r1
%x(11)=r3
%x(12)=r4
%x(13)=r6
%x(14)=lA
%x(15)=lB
%x(16)=V
%y
(1)=ddth2
%y
(2)=ddth3
%y(3)=ddth4
%y(4)=a
A=[-x(10)*sin(x
(2))x(11)*sin(x(3))-x(14)*sin(x(4))0;
x(10)*cos(x
(2))-x(11)*cos(x(3))x(14)*cos(x(4))0;
00x(15)*sin(x(4))cos(x
(1));
00-x(15)*cos(x(4))sin(x
(1))];
B=[-x(10)*x(6)*cos(x
(2))x(11)*x(7)*cos(x(3))-x(12)*x(8)*cos(x(4))0;
-x(10)*x(6)*sin(x
(2))-x(11)*x(7)*sin(x(3))-x(12)*x(8)*sin(x(4))0;
00x(15)*x(8)*cos(x(4))-x(5)*sin(x
(1));
00x(15)*x(8)*sin(x(4))x(5)*cos(x
(1))];
C=[x(6);
x(7);
x(8);
x(16)];
D=[x(9)*x(5)*cos(x
(1));
x(9)*x(5)*sin(x
(1));
x(14)*x(5)*cos(x
(1))+x(16)*sin(x
(1));
x(14)*x(5)*sin(x
(1))-x(16)*cos(x
(1))];
y=inv(A)*D-inv(A)*B*C;
根据第一步和第二步输入数据,运行程序得到各加速度的值:
x3=[x1'
4)10*ones(15,1)q(1,:
)'
q(2,:
q(3,:
...
40*ones(15,1)50*ones(15,1)75*ones(15,1)35*ones(15,1)70*ones(15,1)p(:
1)...
60*ones(15,1)q(4,:
];
f=zeros(4,15);
y3=rrra(x3(m,:
f(:
m)=y3;
f
f=
1.0e+005*
Columns1through8
-0.0038-0.0040-0.0042-0.0044-0.0047-0.0050-0.0054-0.0058
0.00600.00640.00680.00720.00770.00830.00890.0097
0.00330.00360.00390.00420.00460.00500.00560.0062
-0.3601-0.3723-0.3866-0.4033-0.4231-0.4468-0.4755-0.5107
Columns9through15
-0.0064-0.0071-0.0081-0.0094-0.0112-0.0139-0.0185
0.01060.01170.01310.01500.01760.02140.0276
0.00700.00800.00930.01100.01340.01710.0231
-0.5548-0.6111-0.6851-0.7857-0.9290-1.1462-1.5071
接下来计算C点在θ1=55°
,w1=10rad/s时的速度,加速度:
Vx=40*10*sin(55)-50*q(1,10)*sin(p(10,2));
Vy=40*10*cos(55)+50*q(1,10)*cos(p(10,2));
ax=100*40*cos(50)-q(1,10)^2*50*cos(p(10,2))-f(1,10)*50*sin(p(10,2));
ay=100*40*cos(50)-q(1,10)^2*50*cos(p(10,2))-f(1,10)*50*sin(p(10,2));
输出结果:
Vx=-230.2208;
Vy=-231.1533;
ax=2.3069e+004;
ay=2.3069e+004;
θ1
θ2
θ3
θ4
L1’
W2
W3
W4
V
a2
al
rad
mm
rad/s
mm/s
x10^3
rad/s^2
x10^3
mm/s^2
x10^5
0.6981
0.7168
0.7355
0.7542
0.7729
0.7916
0.8103
0.8290
0.8477
0.8664
0.8851
0.9038
0.9225
0.9412
0.9599
0.7163
0.7045
0.6929
0.6815
0.6703
0.6592
0.6482
0.6372
0.6263
0.6154
0.6043
0.5930
0.5812
0.5687
0.5551
2.5455
2.5617
2.5786
2.5963
2.6147
2.6339
2.6539
2.6747
2.6965
2.7192
2.7431
2.7683
2.7950
2.8237
2.8549
1.5461
1.5902
1.6347
1.6796
1.7250
1.7709
1.8174
1.8646
1.9126
1.9616
2.0118
2.0635
2.1169
2.1728
2.2319
93.3149
91.3071
89.2387
87.1076
84.9113
82.6463
80.3086
77.8931
75.3930
72.7998
70.1019
67.2833
64.3217
61.1835
57.8153
-6.3578
-6.2487
-6.1469
-6.0541
-5.9726
-5.9054
-5.8561
-5.8299
-5.8340
-5.8786
-5.9789
-6.1587
-6.4572
-6.9440
-7.7555
8.4725
8.8575
9.2469
9.6433
10.0502
10.4720
10.9145
11.3856
11.8957
12.4601
13.1005
13.8507
14.7646
15.9364
17.5470
23.5099
23.6948
23.9018
24.1350
24.3994
24.7013
25.0491
25.4538
25.9305
26.5003
27.1937
28.0569
29.1637
30.6408
32.7288
-1.0578
-1.0897
-1.1226
-1.1568
-1.1926
-1.2302
-1.2704
-1.3137
-1.3610
-1.4136
-1.4734
-1.5431
-1.6273
-1.7337
-1.8767
-0.3790
-0.3960
-0.4156
-0.4386
-0.4656
-0.4976
-0.5361
-0.5829
-0.6409
-0.7144
-0.8099
-0.9386
-1.1206
-1.3948
-1.8491
0.6037
0.6395
0.6788
0.7225
0.7715
0.8274
0.8919
0.9677
1.0587
1.1707
1.3128
1.4999
1.7586
2.1406
2.7600
0.3334
0.3590
0.3879
0.4210
0.4592
0.5038
0.5567
0.6205
0.6989
0.7976
0.9255
1.0976
1.3402
1.7052
2.3084
-0.3601
-0.3723
-0.3866
-0.4033
-0.4231
-0.4468
-0.4755
-0.5107
-0.5548
-0.6111
-0.6851
-0.7857
-0.9290
-1.1462
-1.5071
表1各构件的位置、速度和加速度
接下来输出图像:
角位置图像,程序如下
plot(x1,p(:
2),'
--'
x1,p(:
3),'
:
'
4),'
*'
title('
角位置'
);
xlabel('
\theta1/rad'
ylabel('
\theta2、\theta3、\theta4/rad'
输出图像如图:
AF长度图像,程序如下:
1))
L1'
/mm'
输出图像如下:
角速度:
plot(x1,q(1,:
),'
x1,q(2,:
x1,q(3,:
W1rad/s'
W2、W3、W4rad/S'
角速度'
F点速度:
plot(x1,q(4,:
))
Vmm/s'
F点速度'
角加速度:
plot(x1,f(1,:
x1,f(2,:
x1,f(3,:
\alpha2、\alpha3、\alpha4rad/S^2'
角加速度'
F点的加速度:
plot(x1,f(4,:
amm/s^2'
F点的加速度'
参考文献
【1】孙恒,陈作模.机械原理【M】.7版.北京:
高等教育出版社,2006
【2】XX文库
题目4-23
在下图所示的正弦机构中,已知lAB=100mm,h1=120mm,h2=80mm,W1=10rad/s(常数),滑块2和构件3的重量分别为G2=40N和G3=100N,质心S2和S3的位置如图所示,加于构件3上的生产阻力Fr=400N,构件1的重力和惯性力略去不计。
试用解析法求机构在Φ1=60°
、150°
、220°
位置时各运动副反力和需加于构件1上的平衡力偶M


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 作业
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 16秋北理工《计算机组成原理》在线作业 辅导资料.docx
16秋北理工《计算机组成原理》在线作业 辅导资料.docx
-
猜灯谜.docx
-
控制原理在目标责任成本管理中实践与探索.docx
-
南开大学18秋学期清考《外贸单证实务》在线作业.docx
-
山西省忻州市第一中学学年高一生物下学期期中试题.docx
-
1云南省现代教育学校督导评估工作规程新修订.docx
-
233069 北交《英语一下》在线作业二 15秋答案.docx
-
东北师范多媒体计算机技术16秋在线作业1.docx
-
专卖店管理.docx
-
专业技术人员公共危机管理考试.docx
-
西安交通大学18年课程考试《信托与租赁》作业考核试题.docx
-
采购系统调研初步需求分析.docx
-
预应力砼用钢绞线.docx
-
小学奥数.docx
-
中国各地区顶尖中学排行榜.docx
-
位移及建筑物沉降观测监测方案.docx
-
教科版五年级科学下册复习题及答案.docx
-
南开大学18秋学期1703《销售管理与实务》在线作业.docx
-
西安三环科技路加油加气站安装方案.docx
-
福建省公务员申论考试十大社会热点解析.docx
-
初中生物教学中应用多媒体教学的研究.docx
-
人教版部编版二年级语文下册生字拼音笔顺组词最新整理.docx
-
17春秋北交《机车车辆运用与维修》在线作业一.docx
-
1云南省现代教育学校督导评估工作规程新修订.docx
-
南开大学18秋学期1703《电子商务法律基础与职业道德》在线作业.docx
-
物流系统规划与设计.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
TYJLADX计算机联锁原理讲义.docx
-
东北师范经济学原理16秋在线作业1.docx
-
100个CFO的八年之资金管理篇.docx
-
实习收入两千八 为何还要交个税.docx
-
东北师范经济学原理16秋在线作业1.docx
-
专升本大学语文新考纲古文全篇翻译.docx
-
专业技术人员继续教育职业幸福感的提升考试试题及答案.docx
-
综合农贸市场管理制度.docx
-
总结全套主材清单.docx
-
中国机长观后感合集15篇.docx
-
中国铁人三项运动协会犯规行为处罚细则.docx
-
中华魂演讲稿集合6篇.docx
-
中考数学一轮复习 一元一次方程及应用训练解析版.docx
-
中医求职信集合7篇.docx
-
中专招生工作总结.docx
-
专情的个性签名.docx
-
专项指导训练翻译铅笔的日志网易博客.docx
-
英语语法填空训练题及答案.docx
-
永州市中考英语试题.docx
-
有机农产品生产技术规范.docx
-
幼儿园教师暑期培训心得体会.docx
-
幼儿园园务年度工作计划工作计划.docx
-
余热发电站中控运行规程.docx
-
语文河北省邯郸市届高三第一次模拟考试语文试题Word版解析.docx
