 simulinkPID仿真Word文档下载推荐.docx
simulinkPID仿真Word文档下载推荐.docx
- 文档编号:16690328
- 上传时间:2022-11-25
- 格式:DOCX
- 页数:16
- 大小:418.21KB
simulinkPID仿真Word文档下载推荐.docx
《simulinkPID仿真Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《simulinkPID仿真Word文档下载推荐.docx(16页珍藏版)》请在冰豆网上搜索。
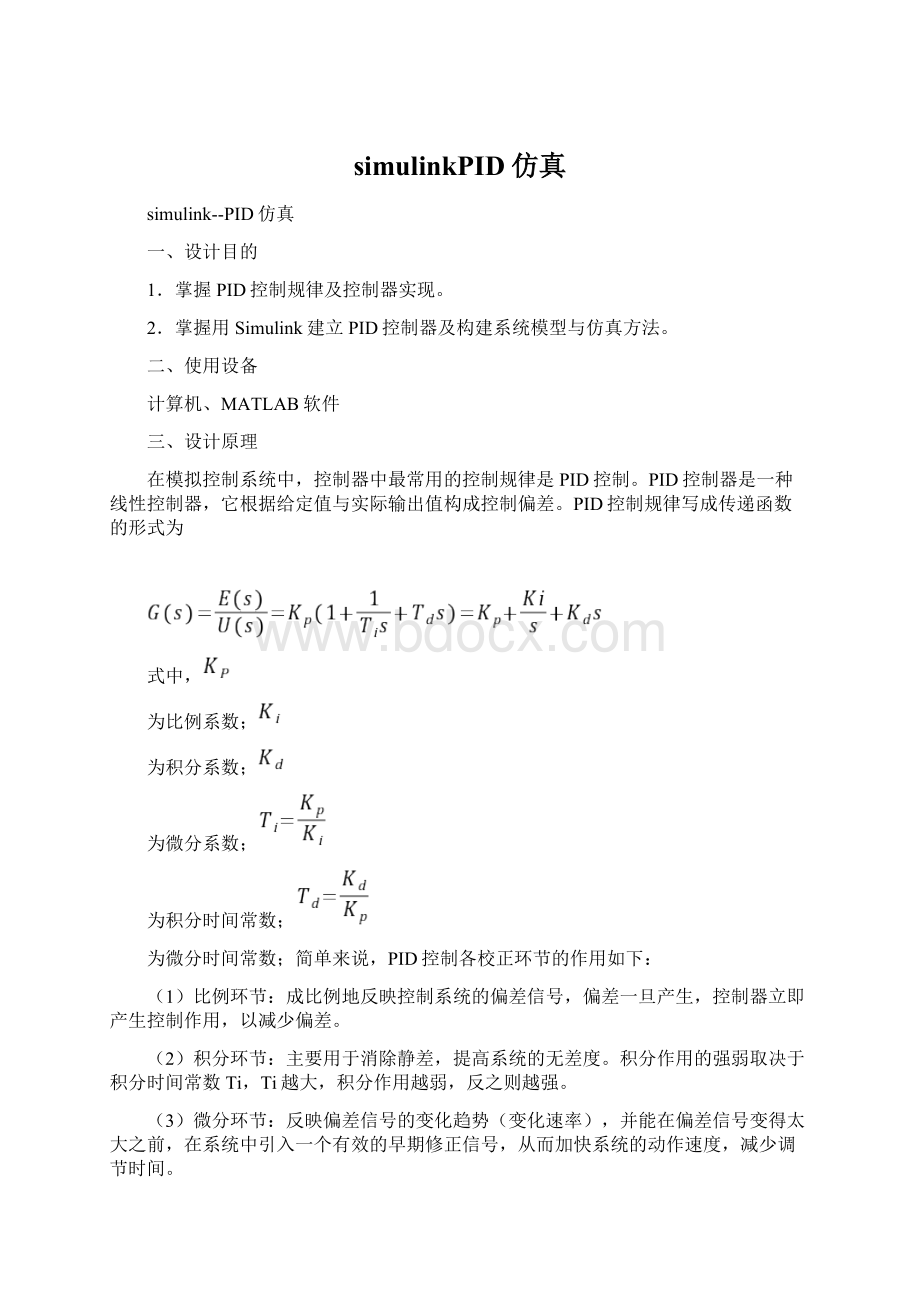
PID控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差。
PID控制规律写成传递函数的形式为
式中,
为比例系数;
为积分系数;
为微分系数;
为积分时间常数;
为微分时间常数;
简单来说,PID控制各校正环节的作用如下:
(1)比例环节:
成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
(2)积分环节:
主要用于消除静差,提高系统的无差度。
积分作用的强弱取决于积分时间常数Ti,Ti越大,积分作用越弱,反之则越强。
(3)微分环节:
反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
四、上机过程
1、在MATLAB命令窗口中输入“Simulink”进入仿真界面。
2、构建PID控制器:
(1)新建Simulink模型窗口(选择“File/New/Model”),在SimulinkLibraryBrowser中将需要的模块拖动到新建的窗口中,根据PID控制器的传递函数构建出如下模型:
各模块在如下出调用:
MathOperations模块库中的Gain模块,它是增益。
拖到模型窗口中后,双击模块,在弹出的对话框中将‘Gain’分别改为‘Kp’、‘Ki’、‘Kd’,表示这三个增益系数。
至此,PID控制器便构建完成,它可以像Simulink自带的那些模块一样,进行拖拉,或用于创建其它系统。
3、搭建一单回路系统结构框图如下图所示:
所需模块及设置:
Sources模块库中Step模块;
Sinks模块库中的Scope模块;
CommonlyUsedBlocks模块库中的Mux模块和Sum模块;
Continuous模块库中的Zero-Pole模块。
Step模块,Sum模块和Zero-Pole模块设置如下:
4、构建好一个系统模型后,就可以运行,观察仿真结果。
运行一个仿真的完整过程分成三个步骤:
设置仿真参数、启动仿真和仿真结果分析。
选择菜单“Simulation/ConfiurationParameters”,可设置仿真时间与算法等参数,如下图示:
其中默认算法是ode45(四/五阶龙格-库塔法),适用于大多数连续或离散系统。
5、双击PID模块,在弹出的对话框中可设置PID控制器的参数Kp,Ki,Kd:
设置好参数后,单击“Simulation/Start”运行仿真,双击Scope示波器观察输出结果,并进行仿真结果分析。
比较以下参数的结果:
(1)Kp=8.5,Ki=5.3,Kd=3.4
(2)Kp=6.7,Ki=2,Kd=2.5
(3)Kp=4.2,Ki=1.8,Kd=1.7
6、以Kp=8.5,Ki=5.3,Kd=3.4这组数据为基础,改变其中一个参数,固定其余两个,以此来分别讨论Kp,Ki,Kd的作用。
只改变
,当
=8.5,
=6.7,
=4.2时候系统输出曲线截图标注;
=5.3,
=2,
=1.8时候系统输出曲线截图标注;
=3.4,
=2.5,
=1.7时候系统输出曲线截图标注。
7、分析不同调节器下该系统的阶跃响应曲线
(1)P调节Kp=8
(2)PI调节Kp=5,Ki=2
(3)PD调节Kp=8.5,Kd=2.5
(4)PID调节Kp=7.5,Ki=5,Kd=3
五.实验结果
1.
(1)Kp=8.5,Ki=5.3,Kd=3.4
2以Kp=8.5,Ki=5.3,Kd=3.4这组数据为基础,改变其中一个参数,固定其余两个。
(1)Ki,Kd不变仅改变Kp;
Kp=8.5,Ki=5.3,Kd=3.4
Kp=6.7,Ki=5.3,Kd=3.4
Kp=4.2,Ki=5.3,Kd=3.4
(2)Kp,Kd不变仅改变Ki;
Kp=8.5,Ki=2,Kd=3.4
Kp=8.5,Ki=1.8,Kd=3.4
(3)Kp,Ki不变仅改变Kd;
Kp=8.5,Ki=5.3,Kd=2.5
Kp=8.5,Ki=5.3,Kd=1.7
3不同调节器下该系统的阶跃响应曲线
六.总结
1、P控制规律控制及时但不能消除余差,I控制规律能消除余差但控制不及时且一般不单独使用,D控制规律控制很及时但存在余差且不能单独使用。
2、比例系数越小,过渡过程越平缓,稳态误差越大;
反之,过渡过程振荡越激烈,稳态误差越小;
若Kp过大,则可能导致发散振荡。
Ti越大,积分作用越弱,过渡过程越平缓,消除稳态误差越慢;
反之,过渡过程振荡越激烈,消除稳态误差越快。
Td越大,微分作用越强,过渡过程趋于稳定,最大偏差越小;
但Td过大,则会增加过渡过程的波动程度。
3、P和PID控制器校正后系统响应速度基本相同(调节时间ts近似相等),但是P控制器校正产生较大的稳态误差,而PI控制器却能消除余差,而且超调量较小。
PID控制器校正后系统响应速度最快,但超调量最大。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- simulinkPID 仿真
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
消防安全管理制度 4.docx
-
消防无人机使用说明书.docx
-
小班开学第一月评语.docx
-
小桥施工组织设计.docx
-
小数除法竖式练习.docx
-
小学安全检查整改报告.docx
-
小学六年级上册音乐教案 第一单元 七彩桥.docx
-
小学三年级下学期工作计划表3篇.docx
-
小学生国旗下讲话新学期.docx
-
小学实习班主任工作计划.docx
-
小学数学课堂练习设计有效性的研究.docx
-
绪论思考题.docx
-
学年桂林旅游学院单招语文模拟试题及答案.docx
-
学生综合素质评价实施方案.docx
-
学校食堂食品安全各种管理制度.docx
-
学院学生社团指导教师管理办法相关表格.docx
-
炎热的夏天小学作文15篇.docx
-
盐城军休所部门决算公开.docx
-
阳春市人民法院招聘合同制书记员司法协警试题及答案解析 doc.docx
