 线性系统能控性能控性与能观性_精品文档资料下载.pdf
线性系统能控性能控性与能观性_精品文档资料下载.pdf
- 文档编号:16088242
- 上传时间:2022-11-19
- 格式:PDF
- 页数:5
- 大小:305.04KB
线性系统能控性能控性与能观性_精品文档资料下载.pdf
《线性系统能控性能控性与能观性_精品文档资料下载.pdf》由会员分享,可在线阅读,更多相关《线性系统能控性能控性与能观性_精品文档资料下载.pdf(5页珍藏版)》请在冰豆网上搜索。
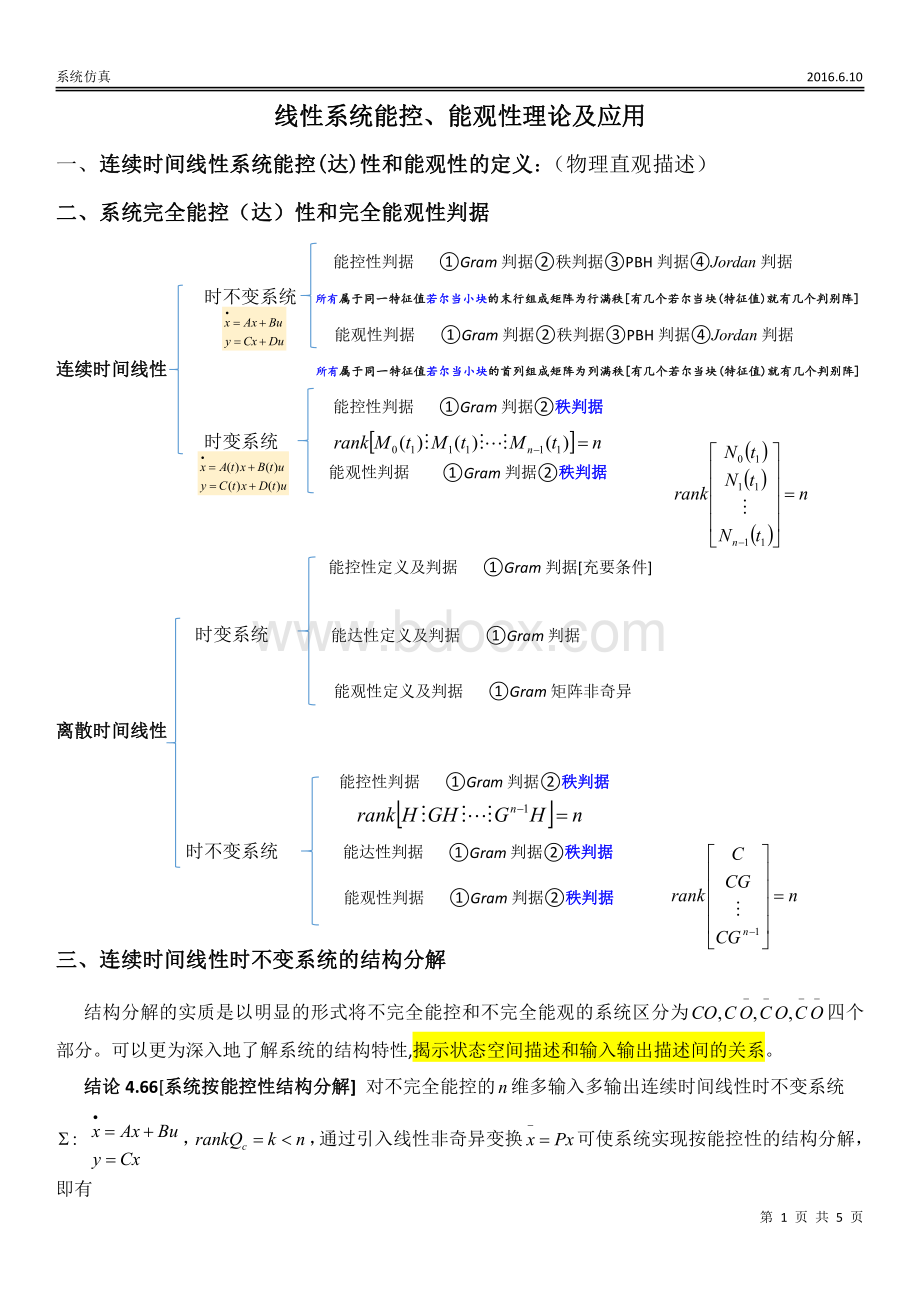
(1)对于LTIC系统,按能控性的结构分解式可以把一个不完全能控的系统显式的区分为完全能控和不能控部分,两者之间存在由不能控到能控部分的耦合作用。
(2)结构分解的形式唯一结果不唯一。
(3)结构分解的能控性判据。
四、四、系统能控性的应用系统能控性的应用4.14.1状态反馈极点配置状态反馈极点配置极点配置是一类最为典型和最为简单的综合问题,状态反馈极点配置的含义是,以一组期望极点即特征值为性能指标,对线性时不变受控系统综合一个状态反馈型的控制,使综合导出的控制系统特征值配置到复平面上期望位置。
4.1.14.1.1问题的提法:
问题的提法:
考虑连续时间线性时不变受控系统BuAxx,任意指定n个期望闭环极点即特征值*2*1,n,限定控制输入为状态反馈vKxu,其中K为np反馈矩阵,v为p维参考输入,基此,状态反馈极点配置的形式化提法就是,对给定受控系统确定一个状态反馈矩阵K,使所导出的闭环控制系统BvxBKAx的特征值满足关系式:
*iiBKA,ni,2,1.状态反馈的引入,不改变系统的能控性能控性。
闭环系统的传递函数矩阵为:
BBKAsICsGB1,K的引入改变了系统矩阵,即系统极点的位置。
4.1.24.1.2极点配置问题的算法极点配置问题的算法极点配置定理极点配置定理对n维连续时间线性时不变系统,系统可通过状态反馈任意配置全部n个极点即特征值的充分必要条件是BA,完全能控。
多输入状态反馈阵算法多输入状态反馈阵算法给定n维多输入连续时间时不变受控系统BA,和一组任意的期望闭环特征值*2*1,n,要求确定np状态反馈矩阵K,使成立*iiBKA,ni,2,1。
相比于单输入情形,多输入情形极点配置在研究思路和计算方法上都要复杂一些,常用的极点配置算法有3种,课本上介绍算法的主要思想是化多输入系统为单输入系统,利用单输入系统极点配置算法求出状态反馈矩阵K。
系统仿真2016.6.10第3页共5页称一个状态反馈矩阵被认为是较好的,如果其元反馈系数总体较小和相应闭环系统的响应较好。
4.1.34.1.3极点配置问题举例及仿真极点配置问题举例及仿真MATLAB提供的函数place()也可求出状态反馈阵K。
该函数的调用格式为K=place(A,B,P)。
Place函数既可以用于单输入情形下的极点配置也可以用于多输入情形,值得注意的是能控性依然是应用place函数的先决条件。
具体程序见附录。
说明:
线性系统的动态性能主要取决于系统极点的位置。
极点配置问题就是把闭环极点组配置到所希望的位置上,等价于使综合系统的动态性能达到期望要求。
极点配置问题的算法有多种,且取得的结果并不唯一。
4.1.44.1.4状态反馈极点配置对系统传递函数矩阵零点的影响状态反馈极点配置对系统传递函数矩阵零点的影响SISO情形:
对完全能控n维SISO连续时间线性时不变系统,引入状态反馈任意配置传递函数sg全部n个极点,一般不影响sg的零点。
特别如果状态反馈使sg某些极点配置为与sg零点相重合从而构成零极对消,被消掉的极点就成为不能观测,这也是状态反馈不一定保持能观测性的一个直观解释。
MIMO情形:
一般不影响传递函数矩阵sG的零点,但是并不意味着sG每个元传递函数的分子多项式不受状态反馈的影响。
4.1.54.1.5输出反馈极点配置及局限性输出反馈极点配置及局限性输出反馈是以输出为反馈变量的一类系统结构信息的不完全反馈。
输出反馈控制系统的特点是易于物理构成,问题的提法;
取输出反馈控制律vFyu,对任意给定期望极点组*2*1,n,确定一个反馈矩阵F,使导出的输出反馈闭环系统CxyBvxBFCAx的所有特征值实现期望的配置,即有*iiBFCA,ni,2,1。
输出反馈局限性:
(1)对完全能控连续时间线性时不变受控系统,输出反馈一般不能任意配置系统全部极点。
(2)对完全能控n维SISO-LTIC受控系统,输出反馈只能使闭环极点配置到根轨迹上。
扩大输出反馈配置功能的一个途径是采用动态输出反馈,即在采用输出反馈同时附加引入补偿器。
可以证明,通过合理选取补偿器机构和特性,可对带补偿器输出反馈系统的全部极点进行任意配置。
4.24.2状态反馈镇定状态反馈镇定问题问题4.2.1所谓的镇定问题就是,对给定的线性时不变受控系统,确定状态反馈控制律vKxu,使导出的状态反馈闭环系统BvxBKAx为渐进稳定,即闭环系统特征值均具有负实部。
镇定问题实质上属于极点区域配置问题,对于镇定问题,系统闭环极点的综合目标,并不要求配置于任意指定期望位置,而只要求配置于复平面的左半开平面上。
4.2.2可镇定条件可镇定条件系统仿真2016.6.10第4页共5页PBB005201011200101301ABC,可镇定充要条件可镇定充要条件LTIC系统可由状态反馈镇定当且仅当系统不能控部分渐进稳定。
可镇定充分条件可镇定充分条件LTIC系统可由状态反馈镇定充分条件是系统为完全能控。
4.2.3状态反馈镇定的算法状态反馈镇定的算法给定n维线性时不变受控系统BA,设其满足可镇定的条件,要求综合np镇定镇定状态反馈矩阵K.(从极点配置的角度确定状态反馈矩阵)若给定系统完全能控,任意指定n个负实部期望特征值,按多输入极点配置算法,计算np镇定镇定状态反馈矩阵K.如果给定可镇定系统BA,不完全能控,则构造能控性结构分解变换矩阵1P,1dimnAc对完全能控部分ccBA,任意指定1n个负实部期望特征值,按多输入极点配置算法,计算1np状态反馈矩阵1K,最后综合到np镇定镇定状态反馈矩阵PKK0,1.4.2.4状态反馈镇定问题举例及仿真状态反馈镇定问题举例及仿真4.2.5输出反馈镇定问题输出反馈镇定问题说明:
(1)系统能通过输出反馈实现镇定的充要条件是:
系统结构分解中能控且能观部分可经输出反馈进行极点配置,其余部分渐进稳定。
(2)能输出反馈镇定,一定可以状态反馈镇定。
反之不成立。
结论:
若系统输出矩阵C非奇异,则系统能用输出反馈镇定的充要条件是系统能用状态反馈镇定。
实质线性方程组解的存在性:
npnqqpKCF(qn待定量的个数等于方程的个数)例:
考虑线性定常系统(A,B,C)其中:
确定输出反馈矩阵使闭环系统可镇定。
解:
由系统的能控能观判据知,该系统是能控且能观的,因此,系统通过输出反馈能镇定的条件是整个系统都应是能镇定的。
通过求解系统的特征值可知开环系统不稳定,设输出反馈矩阵为TffF21,则闭环系统的系统矩阵为BFCA,此时相应的闭环系统特征多项式为:
1PAPA1CPCCxyBuAxx系统仿真2016.6.10第5页共5页X1系统矩阵A1输入矩阵B1输出矩阵C1输出反馈矩阵F输出y1s积分器SignalGeneratorX1状态反馈矩阵K1系统矩阵A1输入矩阵B1输出矩阵C输出y1s积分器参考输入v52213121223fsffsfssfF,由劳斯判据,可以得出特征方程根均具有负实部(能够镇定)的1f及2f取值范围为:
12,3,252121ffff,若取31f,22f,则闭环系统特征多项式化为:
1223ssssfF,其特征根为s1=-0.57,s2=-0.22+1.3j,因此,原系统经过输出反馈H=-3-2T能够镇定.注意:
利用输出反馈未必能使所有能控且能观的系统得到镇定。
静态输出反馈vFyu静态状态反馈vKxu
(1)输出反馈既不改变系统的能控性,也不改变系统的能观性,状态反馈不改变系统的能控性,但有可能改变能观性。
(2)由输出反馈和状态反馈的闭环控制系统状态空间模型可知,输出反馈其实可以视为当K=FC,时的状态反馈。
因此,在进行系统分析时,输出反馈可看做状态反馈的一种特例,反之则不然,由此也可知,状态反馈具有比输出反馈更好的控制品质。
缺点是物理实现差(内部状态不可观的情形)(3)对不完全能控和不完全能观的MIMO-LTIC,作为输入输出函数的传递函数sG只能反映系统能控能观测部分。
(一般而言传递函数矩阵是对系统结构的一种不完全描述,系统可由传递函数矩阵完全表征,当且仅当系统为完全能控和完全能观测即系统为不可简约;
状态空间描述是对系统结构的完全描述,能够同时反映系统结构的各个部分)极点配置出现零极点对消会对系统能控性和能观测性产生怎样的影响?


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 线性 系统 性能 能观性 精品 文档
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 12处方点评管理规范实施细则_精品文档.doc
12处方点评管理规范实施细则_精品文档.doc
-
12核心制度竞赛题库_精品文档.doc
-
12新医疗技术准入制度_精品文档.docx
-
12月份医务科质控通报_精品文档.doc
-
12项基本公共卫生服务项目_精品文档.docx
-
12月环境卫生学监测方法考核试题_精品文档.doc
-
13双重预防体系风险评价制度及准则_精品文档.doc
-
12种不能忽视的可能的心脏病症状_精品文档.doc
-
13检验科“三基”考试试卷_精品文档.doc
-
14以预防为先导_精品文档.doc
-
12高危药品分级管理制度及目录_精品文档.doc
-
13个病种中医护理方案_精品文档.docx
-
16检验科应对突发事件应急预案_精品文档.docx
-
12急救药品管理制度_精品文档.doc
 17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
-
14医疗器械召回程序_精品文档.wps
-
13医用耗材库房管理制度_精品文档.doc
-
136个幼儿园英语课堂游戏_精品文档.docx
-
12经络彩图_精品文档.doc
-
151颅脑损伤恢复期康复临床路径_精品文档.doc
-
14项护理核心制度_精品文档.doc
-
12检验科化学危险物品使用准则_精品文档.doc
-
15-消化内镜手术分级目录_精品文档.xls
-
13术前讨论记录本模板_精品文档.doc
-
17-下腰痛评估表JOAVAPS_精品文档.doc
-
12项基本公共卫生服务流程图_精品文档.doc
-
13中国髋膝关节置换的现状及展望_精品文档.docx
-
14种最迷惑人的癌症前兆_精品文档.docx
-
17消毒供应室医院感染管理制度_精品文档.doc
-
15附加住院津贴保险条款的费率-人保财险备-健康附号_精品文档.doc
-
19陕西省崔家沟监狱罪犯医疗防疫总站突发事件预案_精品文档.doc
-
20项护理技术操作规程及评分标准_精品文档.doc
-
就业实施方案3篇.docx
-
四年级下册数学试题 奥数板块 第1讲 最佳安排 北师大版含答案.docx
-
聚合装置安全操作规程正式.docx
-
三年级下册语文阅读训练题.docx
-
苏教版劳动与技术三年级上册教案.docx
-
陕南茶树病虫害发生现状与防治对策田忠正.docx
-
景观园林招标技术要求1.docx
-
陕西西工大附中高三上抽考试题化学理.docx
-
苏教版四年级语文下册第5单元教案.docx
-
砂砾石涵洞台背回填施工方案设计.docx
-
商品购销合同范本.docx
-
苏教版小学六年级下册语文《螳螂捕蝉》教案.docx
-
九年级上英语单词表人教版.docx
-
商业计划书柳枝行动.docx
-
美的紫砂煲事件.docx
-
酒店财务经理述职报告范文5篇.docx
-
美学与欣赏心得体会.docx
-
上海高中历史第五分册整理.docx
-
酒店客房部经理竞聘演讲稿三篇.docx
