 基于PC机的无人机仿真系统资料下载.pdf
基于PC机的无人机仿真系统资料下载.pdf
- 文档编号:16086803
- 上传时间:2022-11-19
- 格式:PDF
- 页数:6
- 大小:295.13KB
基于PC机的无人机仿真系统资料下载.pdf
《基于PC机的无人机仿真系统资料下载.pdf》由会员分享,可在线阅读,更多相关《基于PC机的无人机仿真系统资料下载.pdf(6页珍藏版)》请在冰豆网上搜索。
Anditisu删flightqualityevaluationandkm曲gdiedevelopmentofUAVs。
Keywords:
UnmannedAerialVehicle(U);
mDdelhIg;
simulation1引言无人飞行器UAV(UnmemIedAerialVehicle)是因军事需求而发展起来的,最早出现于1913年。
它可分为无人机、导弹和靶标三大类。
在70年代的美国侵越战争,1982年的咀色列对黎巴嫩的贝卡备地之战使无人机举成为明星,引起许多国家竟相发展无人机帅年代海湾、科所沃几次局部战争,美军的无人机还多欢完成了Ifl标搜索、战场警戒、海上拦截和海军火炮支援等任务成了美陆军部队的开路先锋,无人机的地位得到了确认。
无人机除了在战场侦察、监视、边境巡逻、定位、跟踪与识别、反雷达、反坦克、直接攻击或目标激光指示与技射、电子侦察等军事用途之外还可用于民用方面的坜区监控、气象撵测、公路逛规、劫探测绘、海洋研究、缉毒、水灾监视、电力线路查巡、森林火灾防救等。
由此可咀看出,无人机无论在军事还在民用方面都有极为广阔的应用前景。
为节省研制费用,加快研制不同种类的无人机的进度,需要对无人机的飞行品质进行全方位地评估,建立无人机飞行仿真系统。
收藕日曩:
20014)9-05怍t筒舟:
睬兵(1967一),男,四J11人硬士,研究方向为智能控制与无人机,虚拟现实、仿真、电力系统仿真等:
皋犯目h1螂七男,副教授,研究方向为不确定系统鲁棒控制与涟波阻及无人驾驶飞机;
募曩析(I943-),男,博导,86324专家组组长,研究方向为智能控制与智能n器方面的研究。
2系统总体方案2I蓉统组成2LI熏瓤件飞行控制系统。
仿真系统。
传感器仿真计算机。
地面站仿真计算机。
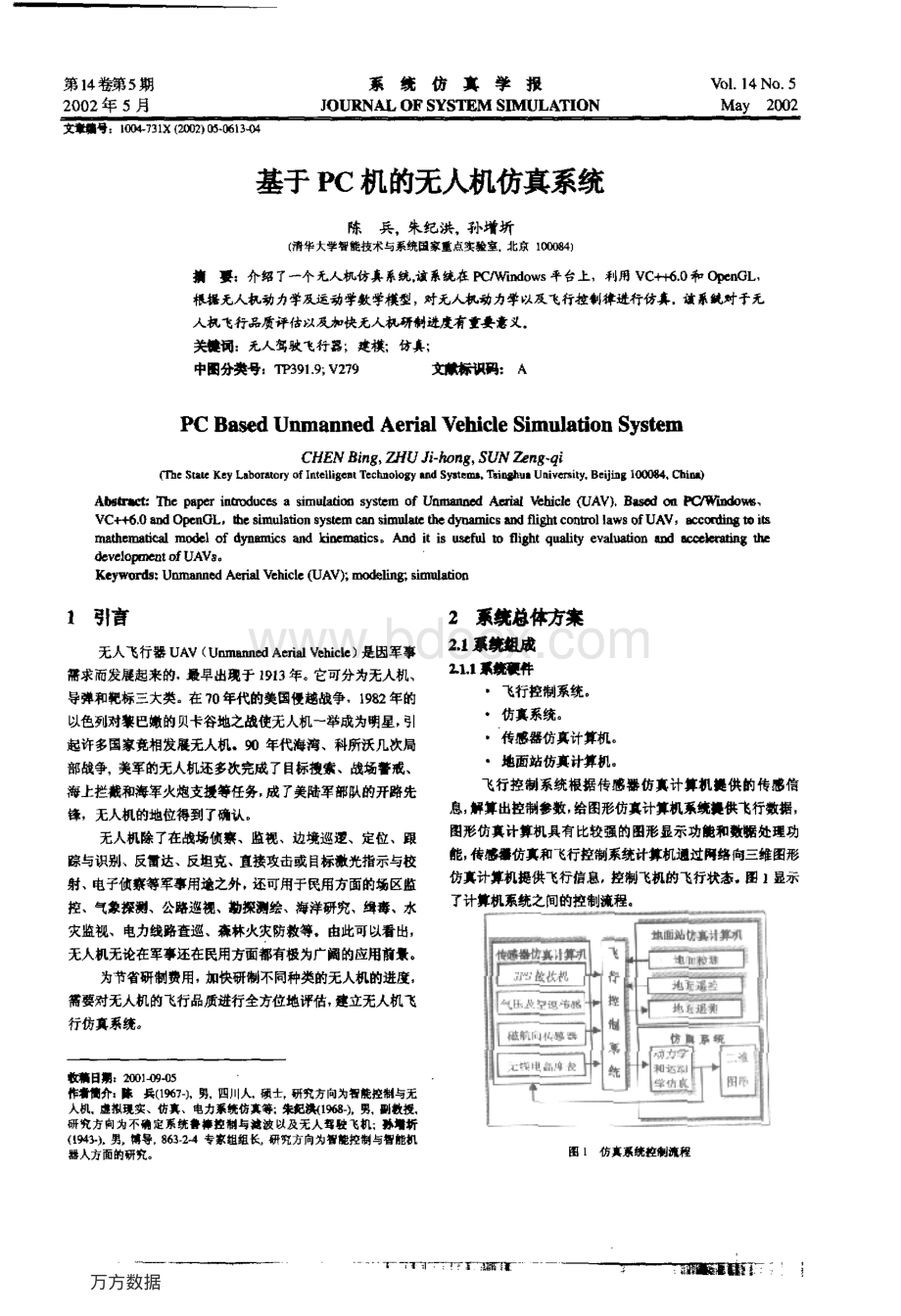
飞行控制系统根据传感器仿真计算机挺供的传感信息,解算出控制参数,给图形仿真计算机系统挺供15行数据,图形仿真计算机具有比较强的图形显示功能和数瞻处理功能,传感薯仿真和飞行控制系统计算机通过碍络向三雏图形仿真计算机提供飞行信息,控制飞机的飞行状态图l显示了计算机系统之间的控制流程。
田l仿真系统控制漶程万方数据614系统仿真学报2002年5月212秉统软件飞行控制器计算机软件运行环境:
DOS622,BC30。
三维图形仿真计算机软件运行环境:
Windows982000NT,VC+60OpenGL。
传感器仿真计算机和地面站仿真计算机软件运行环境:
Wmdows98,VC-+-b60。
网络协议采用TCP1P协议。
网络应用程序包括两个部分t一部分是服务器端一三维图形仿真计算机端的应用程序,用于接受客户端的连接请求、接受客户端的信息、处理客户端的计算请求、向客户端发送计算结果和应答信息等。
另一部分是客户端传蓐器仿真计算机的应用程序,主要用于申请连接到服务器、向服务器发送计算请求、处理服务器拄回的计算结果和其他信息等Visualc+60作为一个功能非常强大的可视化应用程序开发工具功能非常强大,支持面向对象犏程、模块化、代码可重用、组件共享等技术,可以大大提高软件系统的设计、管理和开发的数度。
是计算机程序员的最优秀的应用开发工具之一。
OpenGL即开放性田形库(OpenGLC-nphicUbnry)是由S(3I公司IRISGL发展而来的。
它是一套独立于操作系统和硬件环件的三维图形库和模型库,有着强大的图形功能和良好的跨平台移植能力已成为事实上的图形标准。
OpenGL目前已被广范地应用于可视化、实体造型、CADCAM、模拟仿真等诸多领域。
作为一个开放的三维图形软件包OpenOL与v队之间接口紧密,Microsoft在Vc20以上版本中内置了OpenGL,使广大徽机用户可以充分利用OpenGL的强大圈形功能。
结合二者的优点+可以根方便地开发出面向对象的三维立体仿真模型。
22系统功蠢2l仿真系统仿真系统分为二个部分;
动力学仿真和运动学仿真、三维圈形仿真。
动力学仿真:
根据飞行控制系统发送过来的数据,解算出作用在飞机上的力。
运动学仿真则根据飞行动力学方程解算出飞机的六自由度(俯仰、横滚、偏航、升降、纵向平移、侧向平移)运动信息。
三维图形仿真则利用气动仿真数据和运动学仿真数据,以三维立体的方式显示出飞机的状态,仿真出飞机实际的运动特性。
222传囊仿真计算帆功麓给飞行控制系统提供无线电高度传感器、磁航向传感器、高度空速传感器、捷联惯导,差分GPS。
工23蚰面站仿真计算机功能给机载飞控计算机提供发动机信息提供地面人员控制飞机所需的人机接口、操作界面、综台信息显示,实现地面控制站与无人机的无线数据通讯实施对飞机的有效操纵,实现多种飞行模态的转换为用户提供人工控制、程序控制和自主飞行三种飞行控制模态,机载任务载荷管理,系统自检测。
通过研究理论模型及输入实际飞行参数,用于对无人机的飞行性能和飞行控制、导航等系统的研究。
再配置飞行遥控器,可以训练无人帆的飞控人员3飞机模型及动力学和运动学仿真本文研究的小型无人机采用鸭式气动布局的气动外形,前翼为平直翼,主翼为后掠翼垂直尾位于机翼翼尖一个推力螺旋桨置于机身后部,在前真上设有控翩飞机纵向运动的升降舵面,机翼上设有控制飞机横向运动的副翼机身下部装有不可收起的前三点式起落槊,由前轮控制飞机在地面滑行时的方向和转弯。
为减少阻力,无人飞机的造型符音流线型在计算机屏幕只关心飞机的卉自由度参数,绘制出其摹奉造型以分折飞机的姿态、位置以及其他飞行参数。
31飞机模垂建立将无人机分成固定部分和活动部分。
周定部分包括机身、前翼、机翼、垂尾、发动机;
活动部分包括升降舵、左右副翼和螺旋桨,见图2。
圈2UAVl机并作如下假设:
1认为飞机不仅是刚体且质量是常数。
2假设地面为惯性参考系即假设地坐标为惯性坐标。
3忽略地球曲率把地球看成平面。
4假设重力加速度不随飞行i娃而变化。
5假设飞机的n轴和n轴处于机体的对祢平面内,因而惯性积五砭和协等于零。
在船轴与飞机的惯性主轴重合的情况下zz=0。
但蔚轴一般不是飞机的惯性主轴。
32动力学方程的建立飞机动力学仿真方程可由牛顿第-定律导出。
该定律的向量形式为户=鲁(m网。
=m警L
(1)衍=警L=L警m再式中下标h表示相对地理坐标系而言,一一外力m一飞机质量,矿一飞行速度,庸一外力矩疗一动量矩万方数据第14卷第5期陈兵等:
基于PC机的无人机仿真系统615速度向量对时间的变化率为警L=L警f(3)y、国和ZF用机体轴上的分量表示,可得出线性运动(重心运动)方程E=,l(E峨q。
吒艘)_、=m(吃+u致M峨)“)只=嘣t“蚀_慨)j依据
(2)式、第二豢假设和第五条假设,可推导出动量矩分量:
H燕1:
引y=y,一,Jq(5):
=:
J(4)式可写成。
M=o等嘲庸(6)己掣的分量是df警=,一q。
1譬吨卜即。
l(7)警吨,:
】进一步推导可得角运动方程。
Z=JA+识-,)嗥哪+o(啦峨棚)、z屿=惦+仉t)q峨I略蝗吨)
【(8)z岭,A川,哪嗥qo(j飞机绕机体轴的旋转角速度峨、q、啦与夹角妒、0、,的关系如式(9):
。
=尹+妒sin考1,=osmy+妒secosy(9)oJ:
=0cos,一妒oososhayJ即可毗求出f=qt90(qoosr一啦sin加妒2赤(qcosyq咖y)o0=60,siny+:
cosyj飞机在飞行中,由作用于帆身上的力和力矩共同影响。
作用在飞机上的力由三部分组成:
发动机的推力P;
地心引力造成的重力G和气动力R。
作用于飞机上的力矩是个向量沿空间坐标系分解为三个力矩:
滚转力矩、伯航力矩和俯仰力矩。
飞机的力学分析:
升降舵处于飞机前翼由它产生帕仰力矩,机翼上的两十剐翼产生滚动力矩和偏航力矩,发动机的推力由风门开和大小决定。
飞机姿态由三个姿态欧拉角(即滚转角、俯仰角和偏行角)确定,姿态角与姿态角变化率和飞机角速度分量关系为:
争=p+qsin妒t98+rcosIl,t900=qeos口-ysint妒=日sinp日一rcosp日飞机受力情况见圈3。
圈3作用在E机上的力和力矩挂3A蛾性化状杏方程上面推导的飞行器运动方程是非线性擞分方程,不暑求解。
一般利用小扰动原理对微分方程键进行线性处理,以便采用较简单的求解方法。
无人机有左右副翼、俯仰舵三个操纵量控制飞机的滚转角、帕航角,俯仰角,经过实验数据挝台,可以得出操纵量与状态量的关系,方程式如下:
y=嘞+马a+如。
广+4,旷+qor+bF1y=+岛卢+如卢2+岛卢+钆_B+以-B5卜一=岛+q埘+c2+岛国+q耐+c;
dJ当前状态量和控制量带入飞行控捌方程中,用宠格-库塔方法解出飞机


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 PC 无人机 仿真 系统
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 (完整word版)信息论与编码期末考试题----学生复习用.doc
(完整word版)信息论与编码期末考试题----学生复习用.doc
-
(完整)六年级上册几何图形题.docx
-
(完整)储罐防腐施工方案.doc
-
(完整word版)公务员录用体检表.doc
-
(完整)八年级上册几何证明题专项练习.doc
-
(决策管理)投资决策委员会实施细则.doc
-
(完整)四年级上册口算、竖式计算、脱式计算.doc
-
(压轴题)初中物理八年级上册第一章《机械运动》检测(含答案解析)(2).doc
-
(完整)小学三年级心理健康教案.doc
-
(完整)初中文言文翻译技巧.doc
-
(名师整理)语文中考《骆驼祥子》名著导读优秀教案.docx
-
(完整word版)偏旁部首名称大全.doc
-
(人教PEP)五年级英语竞赛试题及答案.doc
-
(完整)山东省普通高中学生综合素质评价信息管理系统操作手册学生用户手册.doc
-
(完整word版)体育课教案模板.doc
-
(住宅楼方案)房屋建筑学课程设计说明书.doc
-
(完整word版)《分数的意义》优秀教学设计(公开课).doc
-
(完整word版)安全生产标准化实施方案.doc
-
(完整)初中生人物形象分析常用词汇.doc
-
(完整版)借用公司资质协议.doc
-
(完整word版)仙剑奇侠传三图文攻略(最详细版).doc
-
(完整word版)历年陕西省专升本英语真题(答案解析超全).doc
-
(完整)四年级四则混合运算训练题100道.doc
-
(完整word版)学校团总支部换届选举方案.doc
-
(完整word版)安全标准化绩效评定计划.doc
-
(完整)分布式光伏发电项目施工组织设计.doc
-
(完整版)埋地塑料管结构环刚度计算.doc
-
(完整版)国家农业产业强镇示范建设实施方案.doc
-
(完整版)八年级数学上几何典型试题及答案.doc
-
(完整版)六年级音乐下册人音版理论知识梳理.doc
-
(完整版)囚徒健身图文教程和计划表(完美打印版).doc
 (完整版)固定资产盘点表.xls
(完整版)固定资产盘点表.xls
-
个人房屋租赁合同汇编.docx
-
关于社区矫正工作的若干问题解答.docx
-
对女生说的动人情话.docx
-
高效液相色谱法知识汇总大全集最新最值得收藏的资料整理.docx
-
工程项目管理流程与规章制度.docx
-
管工技能培训考试题库.docx
-
管理学精品课程课后习题.docx
-
高一化学必修1期末复习资料汇编.docx
-
儿童基础舞蹈教案.docx
-
高中化学 第二章第一节第2课时 训练全程跟踪 新人教版选修5.docx
-
尔雅个人理财规划期末考试答案.docx
-
格兰仕文稿.docx
-
高一下学期英语阅读专项训练五标准答案.docx
-
副主任银行竞聘演讲稿.docx
-
二级建造师工程类或工程经济类专业对照表.docx
-
高中必背篇目理解性背诵默写 32页.docx
-
干部受处分后思想汇报.docx
-
二级造价工程师《工程造价管理基础知识》复习题集第271篇.docx
-
高中政治必修一第一单元练习题.docx
