 AVR单片机对舵机的精确控制资料下载.pdf
AVR单片机对舵机的精确控制资料下载.pdf
- 文档编号:16086522
- 上传时间:2022-11-19
- 格式:PDF
- 页数:3
- 大小:810.41KB
AVR单片机对舵机的精确控制资料下载.pdf
《AVR单片机对舵机的精确控制资料下载.pdf》由会员分享,可在线阅读,更多相关《AVR单片机对舵机的精确控制资料下载.pdf(3页珍藏版)》请在冰豆网上搜索。
二、舵机简介舵机英文叫Servo,也称伺服电机。
其特点是结构紧凑、易于安装调试、控制简单、大扭力、成本较低等。
舵机的主要性能取决于最大力矩和工作速度(一般是以秒/60度为单位),适用于那些需要角度不断变化并保持的控制系统。
舵机通常采用脉宽调制信号(PWM)控制,既给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。
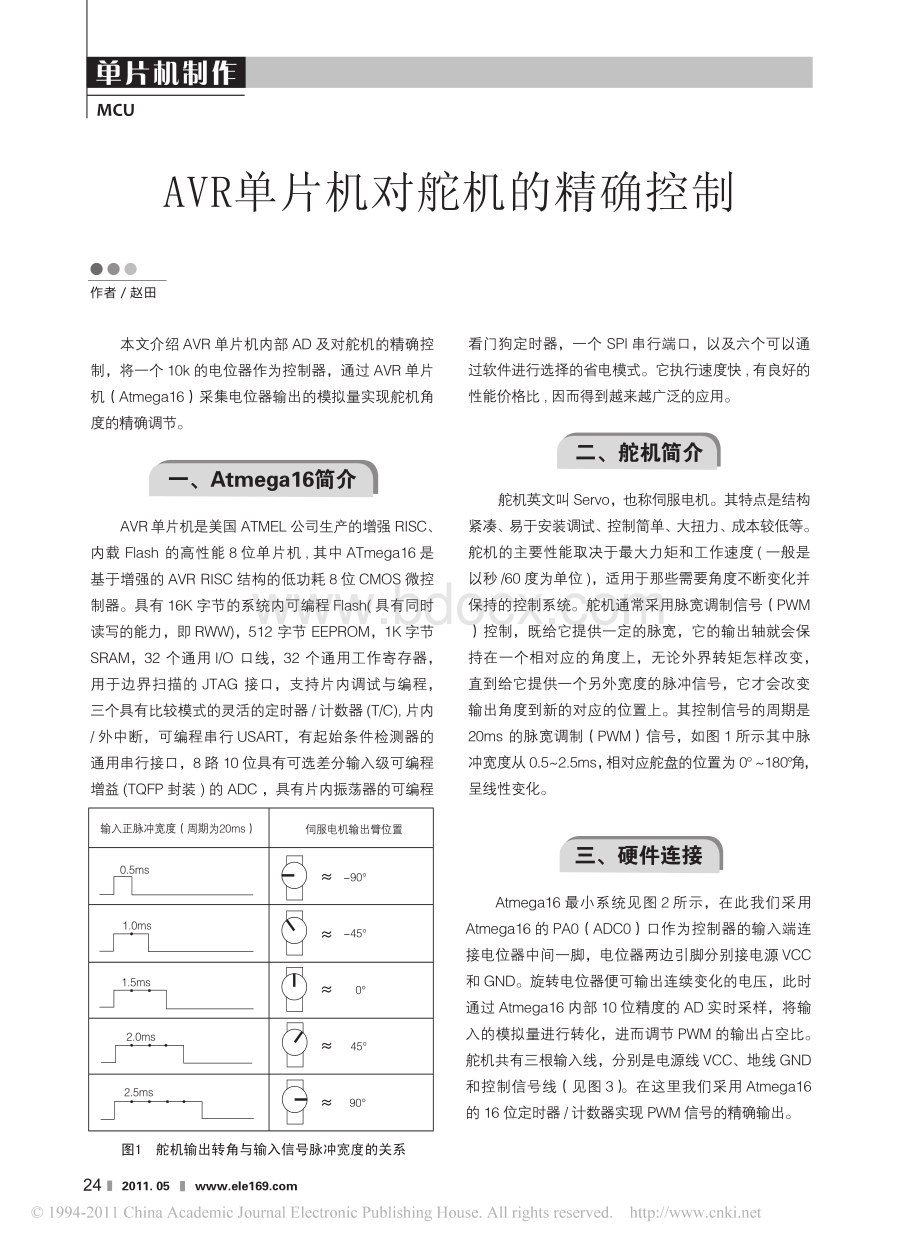
其控制信号的周期是20ms的脉宽调制(PWM)信号,如图1所示其中脉冲宽度从0.52.5ms,相对应舵盘的位置为0180角,呈线性变化。
作者/赵田AVR单片机对舵机的精确控制图1舵机输出转角与输入信号脉冲宽度的关系三、硬件连接Atmega16最小系统见图2所示,在此我们采用Atmega16的PA0(ADC0)口作为控制器的输入端连接电位器中间一脚,电位器两边引脚分别接电源VCC和GND。
旋转电位器便可输出连续变化的电压,此时通过Atmega16内部10位精度的AD实时采样,将输入的模拟量进行转化,进而调节PWM的输出占空比。
舵机共有三根输入线,分别是电源线VCC、地线GND和控制信号线(见图3)。
在这里我们采用Atmega16的16位定时器/计数器实现PWM信号的精确输出。
输入正脉冲宽度(周期为20ms)0.5ms-90-45459001.0ms1.5ms2.0ms2.5ms伺服电机输出臂位置单片机制作MCU252011.05四、AD采样程序分析在这里采用Atmega16片内2.56V的基准电压,0通道输入连续转换模式。
在默认条件下,逐次逼近电路需要一个从50kHz到200kHz的输入时钟以获得最大精度,ADC模块包括一个预分频器,它可以由任何超过100kHz的CPU时钟来产生可接受的ADC时钟,在此我们选用8M晶振64分频。
ADC通过逐次逼近的方法将输入的模拟电压转换成一个10位的数字量,存放于ADC数据寄存器ADCH及ADCL中,我们只要读取这个数字量并转换成所需整型即可,具体过程由以下程序完成。
图2Atmega16最小系统图3舵机及AD输入12345678910123456789101234567891012345678910123456784039383736353433222324252627282913579246810108642975313231301415161718192021913X2R21KX13k3k3kR3R4R512D0D1D2D3D4D5D6D7D0D1D2D3D4D5D6D7PB0(T0)PB1(T1)PB2(AIN0)PB3(AIN1)PB4(SS)PB5(MOS1)PB6(MIS0)PB7(SCK)PD0(RXD)PD1(TXD)PD2(INT0)PD3(INT1)PD4(0C1B)PD5(0C1A)PD6(ICP)PD7(TOSC2)RESTX1X2RXDTXDINT0INT1PD4PD5PD6PD7PA0(ADC0)PA1(ADC1)PA2(ADC2)PA3(ADC3)PA4(ADC4)PA5(ADC5)PA6(ADC6)PA7(ADC7)APC0APC1LEDLKSECLKBITLK18820BEEPCSLSBSCLSDATCKTMSTD0TD1PC6PC7PC0(SCL)PC1(SDA)PC2(TCK)PC3(TMS)PC4(TD0)PC5(TDI)PC6(T0SC1)PC7(T0SC2)VCCVCCVCCVCCVCCAREFGNDAVCCVCCU1J1J3J4PAPCJ2PHPDVCCVCCVCCD5D6D7RESETTD1TMSTD0TCKVCCVCCVCCVCCR8RESETRESET22PF22PF8MH2Y110kC1C2C3RESETX1X2JP1JP2RESETRXDTXDINT0INT1PD4PD5PD6PD7J2PD5VCCDJADC0123VCCR110k单片机制作MCU26voidADC_init(void)/AD初始化子函数ADCSRA=0xE4;
/ADC使能;
ADC开始转换;
连续转换;
64分频ADCSRA|=(1ADEN)|(1ADSC)|(1ADATE)|(1ADPS2)|(1ADPS1);
可采用ADC中断ADMUX=0xC0;
/内部2.56V参考电压;
输入通道为PD0;
输出结果右对齐uintADC_convert(void)/模数转换子函数uinttemp1,temp2;
temp1=(uint)ADCL;
temp2=(uint)ADCH;
/取得模数转换值temp2=(temp28)+temp1;
return(temp2);
uintConv(uinti)/数据转换子函数longx;
uinty;
x=(5000*(long)i)/1024;
/将变量i转换成需要现实的形式1024份=2的10次方(低8位高两位)y=(uint)x;
/x强制转换成整型returny;
五、舵机控制程序分析在此部分我们使用相位与频率修正PWM模式(简称相频修正PWM模式)可以产生高精度的、相位与频率都准确的PWM波形。
我们通过AD采样得出的1500连续变化的整数来控制输出周期为20ms,脉宽为0.52.5ms的脉冲,进而控制舵机由-9090角的连续变化。
voidPwm_init(void)DDRA|=(110)adc_val=ADC_convert();
dis_val=Conv(adc_val);
AD_val=dis_val/10;
cnt=0;
delay(1000);
Pwm_vary();
END


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- AVR 单片机 舵机 精确 控制
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 (完整word版)信息论与编码期末考试题----学生复习用.doc
(完整word版)信息论与编码期末考试题----学生复习用.doc
-
(完整)六年级上册几何图形题.docx
-
(完整)储罐防腐施工方案.doc
-
(完整word版)公务员录用体检表.doc
-
(完整)八年级上册几何证明题专项练习.doc
-
(决策管理)投资决策委员会实施细则.doc
-
(完整)四年级上册口算、竖式计算、脱式计算.doc
-
(压轴题)初中物理八年级上册第一章《机械运动》检测(含答案解析)(2).doc
-
(完整)小学三年级心理健康教案.doc
-
(完整)初中文言文翻译技巧.doc
-
(名师整理)语文中考《骆驼祥子》名著导读优秀教案.docx
-
(完整word版)偏旁部首名称大全.doc
-
(人教PEP)五年级英语竞赛试题及答案.doc
-
(完整)山东省普通高中学生综合素质评价信息管理系统操作手册学生用户手册.doc
-
(完整word版)体育课教案模板.doc
-
(住宅楼方案)房屋建筑学课程设计说明书.doc
-
(完整word版)《分数的意义》优秀教学设计(公开课).doc
-
(完整word版)安全生产标准化实施方案.doc
-
(完整)初中生人物形象分析常用词汇.doc
-
(完整版)借用公司资质协议.doc
-
(完整word版)仙剑奇侠传三图文攻略(最详细版).doc
-
(完整word版)历年陕西省专升本英语真题(答案解析超全).doc
-
(完整)四年级四则混合运算训练题100道.doc
-
(完整word版)学校团总支部换届选举方案.doc
-
(完整word版)安全标准化绩效评定计划.doc
-
(完整)分布式光伏发电项目施工组织设计.doc
-
(完整版)埋地塑料管结构环刚度计算.doc
-
(完整版)国家农业产业强镇示范建设实施方案.doc
-
(完整版)八年级数学上几何典型试题及答案.doc
-
(完整版)六年级音乐下册人音版理论知识梳理.doc
-
(完整版)囚徒健身图文教程和计划表(完美打印版).doc
 (完整版)固定资产盘点表.xls
(完整版)固定资产盘点表.xls
-
《美学原理》考试复习参考资料全.docx
-
LED显示屏投资分析评测报告.docx
-
《管理心理学》高起专西安交大网院试题库习题答案.docx
-
安全管理的发展历程新版.docx
-
2衬胶管道制作安装施工方案.docx
-
《职业发展与就业指导》复习题库.docx
-
《骆驼祥子》读后感.docx
-
《外国小朋友的画》美术教案.docx
-
按摩心得体会.docx
-
《公路交通安全设施设计细则》JTGTD806堪误表杂项.docx
-
10kV农配网设计注意事项.docx
-
《钢铁是怎样炼成》名著阅读训练题含答案.docx
-
GMP药品经营质量管理规范.docx
-
6关键施工技术工艺及工程实施的重点难点和解决方案.docx
-
Get清风店中店合作协议书.docx
-
1《剑桥商务英语》课程实施方案.docx
-
TIME 单挑 1000word版5普通词 动词.docx
-
《体育社会学》复习思考题及参考答案.docx
-
XX省第十四届中学生运动会健美操比赛暨全国第十三届学生运动会选拔11页.docx
