 XKSX5C型电气及自动化实训台技术培训材料解析Word格式文档下载.docx
XKSX5C型电气及自动化实训台技术培训材料解析Word格式文档下载.docx
- 文档编号:15685816
- 上传时间:2022-11-15
- 格式:DOCX
- 页数:21
- 大小:535.18KB
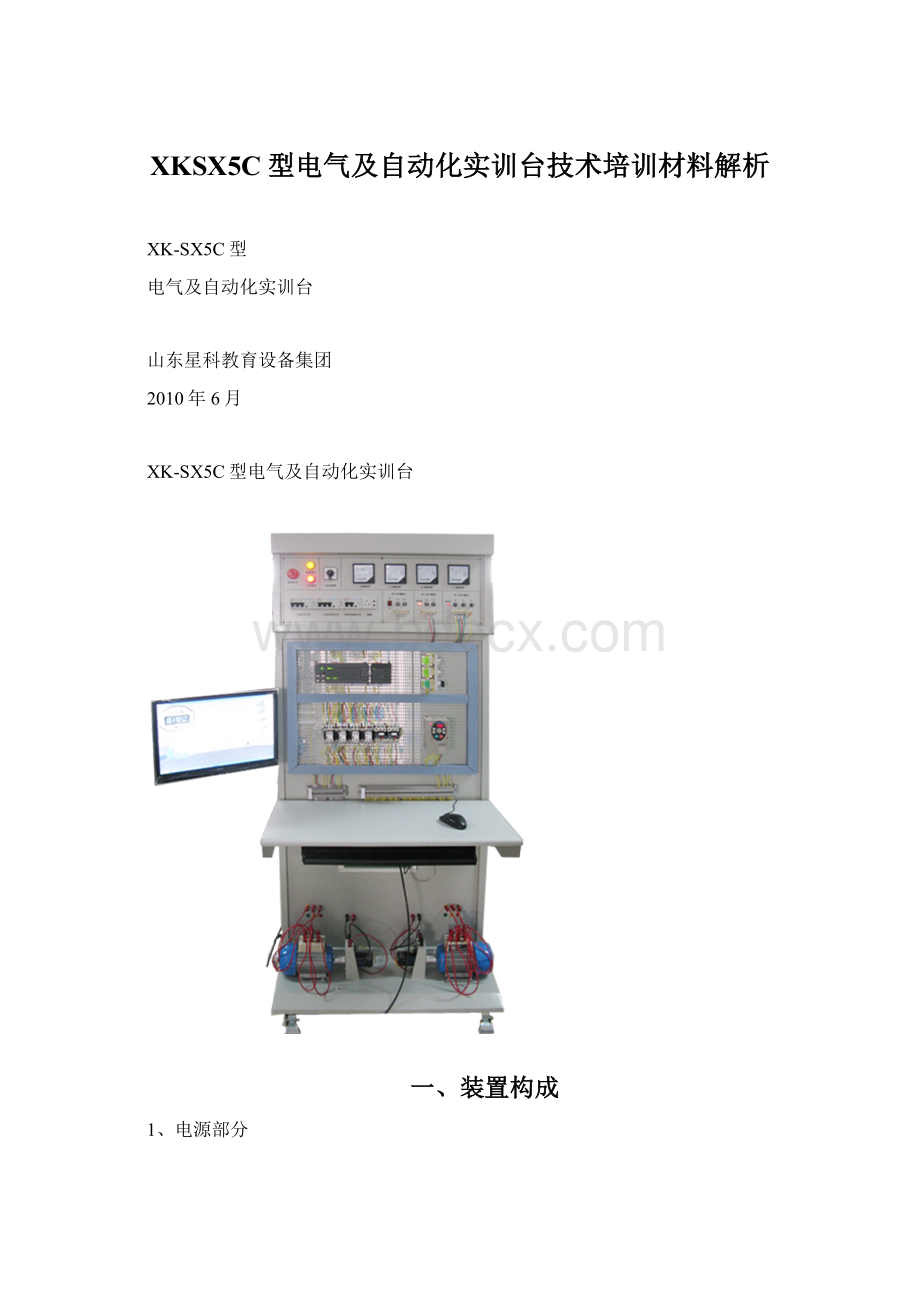
XKSX5C型电气及自动化实训台技术培训材料解析Word格式文档下载.docx
《XKSX5C型电气及自动化实训台技术培训材料解析Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《XKSX5C型电气及自动化实训台技术培训材料解析Word格式文档下载.docx(21页珍藏版)》请在冰豆网上搜索。
该系统除了能体现出灯、电磁阀等开关信号控制的对象状态外,还能体现电动机的转向、转速等信号,这是该系统最为先进的地方。
该仿真器采用基于第一视觉的虚拟现实技术,提供以下三维虚拟控制对象仿真软件:
全自动洗衣机控制器智能家用照明、报警控制器
智能停车场自动计费管理系统机械手
电镀生产线自动送料装车
变频空调太阳能热水器
抢答器冲压机
交通灯天塔之光
邮件分拣运料小车
水塔水位自动控制三相异步电动机正反转
三相异步电动机星三角启动多种液体混合
流水生产线自动成型机
四层电梯自动售货机
自动轧钢机智能马桶
柔性生产线
5、系统配置
序号
名称
型号、参数
数量
1.
实训台
800W*600L*1890H
1台
2.
急停按钮
LAY7,Φ22.5mm
1只
3.
电源指示灯
380V(黄色)Φ22mm
4.
指示灯
380V(红色)Φ22mm
5.
交流接触器
CJX2-0910,220V
6.
万能转换开关
LW39B-16YH2/3
7.
电压表
6L2型,500V,开孔80mm*80mm
8.
电流表
6L2型,5A,80mm*80mm
3只
9.
三相漏电保护开关
DZ47LE-63/3P+N/D10A/30mA
10.
DZ47LE-63/3P/D6A/30mA
11.
单相自动断路器
DZ47LE-63/2P/D6A,30mA
12.
接线端子
KT8-2.5/4P
2只
13.
KT8-2.5/6P
14.
模数化插座
AC30/2P/10A
15.
AC30/3P/10A
16.
熔断器座
开孔Φ12mm
7只
17.
玻璃熔断器芯
2.5A
4个
18.
5A
3个
19.
虚拟负载接口板(含软件)
1套
20.
控制面板(按钮、信号灯用)
1块
二、使用说明
1、上电顺序:
实验室需提供三相四线电源,开始时“急停按钮”在拍下状态。
实验室电源送上后,实训台仅2P插座和3P插座有电。
合上“总电源开关”,“电源指示灯(黄色)”点亮。
这时旋转“三相电压转换开关”,指针电压表分别显示U相与V相、V相与W相、W相与V相之间的电压。
松开“急停按钮”,“上电指示灯(红灯)点亮;
如果想使用380V三相电压,可合上“三相电源开关”;
如果想使用220V单相电压,可合上“单相电源开关”;
如果想使用直流24V低压直流电源,可合上“DC24V船型开关”。
三相380V电源、单相220V电源、低压直流24V电源,分别由对应的接线端子引出。
2、断电顺序:
断开“DC24V船型开关”,关掉直流24V低压直流电源;
断开“单相电源开关”,关掉220V单相电压;
断开“三相电源开关”,关掉380V三相电压;
断开“电源总开关”,“电源指示灯”、“上电指示灯”熄灭;
拍下“急停按钮”。
3、注意:
紧急情况下,拍下急停按钮。
三、实验项目练习
项目一运料小车
一、虚拟负载接口
1、控制信号输出
输出端口
功能
备注
1
光耦输出Q1
“仓库”限位开关
“仓库”到位限位开关
2
晶体管输出Q1
“1号工位”限位开关
“1号工位”到位限位开关
3
晶体管输出Q2
“2号工位”限位开关
“2号工位”到位限位开关
2、控制信号输入
输入端口
晶体管输入I1
装料指示灯
晶体管输入I2
卸料指示灯
光耦输入I1
抱闸
二、演示实验
1、控制要求
(1)按下启动按钮后,小车开始装料,(装料时间为5秒)
(2)装料完毕后小车开始前进,至“1号工位”位置时,进行卸料(卸料时间为8秒),卸完料然后再后退到“仓库”工位进行装料(装料时间为5秒)。
(3)在“仓库”位置装料完毕后小车前进,行至“2号工位”位置后开始卸料(卸料时间为8秒),卸完料然后后退到“仓库”工位。
(4)在运行过程中按下停止按钮,系统停止。
2、I/O分配
(1)开关量输入
点号
对应端口
“启动”按钮
I0.0
K0
“停止”按钮
I0.1
K1
I0.2
4
I0.3
5
I0.4
(2)开关量输出
后退
Q0.0
前进
Q0.1
Q0.2
Q0.3
Q0.4
3、PLC程序
参考程序见“运料小车.MWP”。
4、操作演示
(1)按图所示进行实验接线。
主回路
控制回路
(2)打开PLC程序“运料小车.MWP”,先将PLC切换到停止状态,然后将程序装入PLC,最后将PLC切换到运行状态。
(3)启动虚拟负载,选择“运料小车”程序功能模块,进入程序运行状态。
(4)按控制要求进行操作,观察控制是否满足要求。
项目二电镀生产线
“上料位”限位开关
“前处理位”限位开关
“电镀位”限位开关
光耦输出Q2
“后处理位”限位开关
光耦输出Q3
“下料位”限位开关
6
光耦输出Q4
镀件上升限位
7
光耦输出Q5
镀件下降限位
8
光耦输出Q6
钩子勾住镀件
上料指示灯
前处理指示灯
电镀指示灯
光耦输入I2
后处理指示灯
光耦输入I3
吸附开关
光耦输入I4
横移抱闸
光耦输入I5
升降抱闸
(1)初始状态吊钩在上料位上方。
按下启动按钮后系统启动,吊钩下降到下限位,等待1s挂上镀件。
吊钩上升到上限位。
(2)行车右行,到前处理工位,吊钩下降到下限位,进行1s的前处理,上升到上限位。
(3)行车右行,到渡槽工位。
吊钩下降到下限位,电镀1s钟后,上升到上限位。
(4)行车右行,到后处理工位。
吊钩下降到下限位,进行1s的后处理,上升到上限位。
(5)行车右行,到下料工位。
吊钩下降到下限位,1s的放下镀件时间。
(6)继续从1开始循环。
(7)当在系统运行时按下停止按钮,系统完成当前循环后停止。
I0.5
I0.6
I0.7
9
I1.0
10
I1.1
(2)开关量输出
行车左行
行车右行
镀件上升
镀件下降
Q0.5
Q0.6
Q0.7
Q1.0
Q1.1
Q1.2
参考程序见“电镀.MWP”。
(1)按图进行实验接线。
(2)打开PLC程序“电镀.MWP”,先将PLC切换到停止状态,然后将程序装入PLC,最后将PLC切换到运行状态。
(3)启动虚拟负载,选择“电镀”程序功能模块,进入程序运行状态。
项目三机械手
X轴左限位
X轴右限位
Y轴上限位
Y轴下限位
Z轴顺时针限位
Z轴逆时针限位
X轴:
左行
右行
Y轴:
上行
下行
Z轴:
顺时针方向
逆时针方向
手抓抓紧
按下启动按钮,机械手沿着X轴方向左行、Y轴方向下行、Z轴方向顺时针运行;
当机械手到达X轴左限位、Y轴下限位、Z轴顺时针限位时,机械手开始抓紧物料,延时1.5s后机械手沿着Y轴方向上行;
当机械手到达Y轴上限位时,机械手沿着X轴方向右行、Z轴方向逆时针运行;
当机械手到达X轴右限位、Z轴逆时针限位时,机械手沿着Y轴方向下行;
当机械手到达Y轴下限位时,机械手开始放开物料,延时1.5s后机械手沿着Y轴方向上行;
当机械手到达Y轴上


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- XKSX5C 电气 自动化 实训台 技术培训 材料 解析
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
 小学-禁毒实务教育(课件).ppt
小学-禁毒实务教育(课件).ppt
-
科技开发计划.doc
-
英语绘本教学课件.ppt
-
科技大楼悬挑脚手架施工方案计算书.doc
-
小学hn禽流感健康教育ppt课件.pptx
-
英语角.ppt
-
秦岭天华山隧道施工方案.docx
-
科技创新与美好安徽建设测验及答案2017年11月1日.doc
-
科技大楼双排外竹脚手架施工方案计算.doc
-
小学《道德与法治》课程学习评价.pptx
-
租户装修须知(总包方).docx
-
科技成果转化奖励办法.docx
-
译林版小学英语3AUnit2课件2.ppt
-
课前热身素材--脑筋急转弯.pptx
-
英语课件.pptx
-
小学一年级安全教育课件.ppt
-
移动式操作平台.docx
-
英语课堂游戏ppt5版.ppt
-
裴栓保.ppt
