 基于MPU6050的老人摔倒检测系统设计Word文档格式.doc
基于MPU6050的老人摔倒检测系统设计Word文档格式.doc
- 文档编号:15407749
- 上传时间:2022-10-30
- 格式:DOC
- 页数:4
- 大小:658.56KB
基于MPU6050的老人摔倒检测系统设计Word文档格式.doc
《基于MPU6050的老人摔倒检测系统设计Word文档格式.doc》由会员分享,可在线阅读,更多相关《基于MPU6050的老人摔倒检测系统设计Word文档格式.doc(4页珍藏版)》请在冰豆网上搜索。
用户自主启动型报警系统、基于视频装置的摔倒探测系统、基于MEMS传感器的摔倒姿态检测系统等[1][2]。
用户自主型报警系统具有一些难以避免的缺点:
用户在摔倒之后必须没有失去意识,有一定的活动能力。
另外,目前基于视频装置的摔倒探测系统对于用户的隐私权还不能完全保证,而且存在一些视频的死角等问题。
基于MEMS传感器的摔倒探测系统是指嵌入了微型传感器的设备,这种检测系统可以实时监测人体的活动,通过算法判断是否发生了摔倒。
这种判断方式可以应用于摔倒之后晕倒的情况,对患有老年精神疾病的对象也可以实现保护;
另外对用户的隐私实现了最大程度的保护,应用的范围限制也比较小,是一种比较理想的摔倒检测系统。
MPU6050的角速度感测范围最高可以达到±
2000°
/s,能够准确地追踪动作;
加速度感测范围最高可以达到±
16g,完全能满足对人体摔倒动作的检测要求。
本文运用一种新型的MEMS传感器MPU6050,能同时对三轴加速度及三轴角速度进行检测,通过实验设定了加速度与角速度阈值,通过阈值与人体姿态数据的组合分析能较准确的对人体摔倒进行检测判断[3]。
1系统设计原理
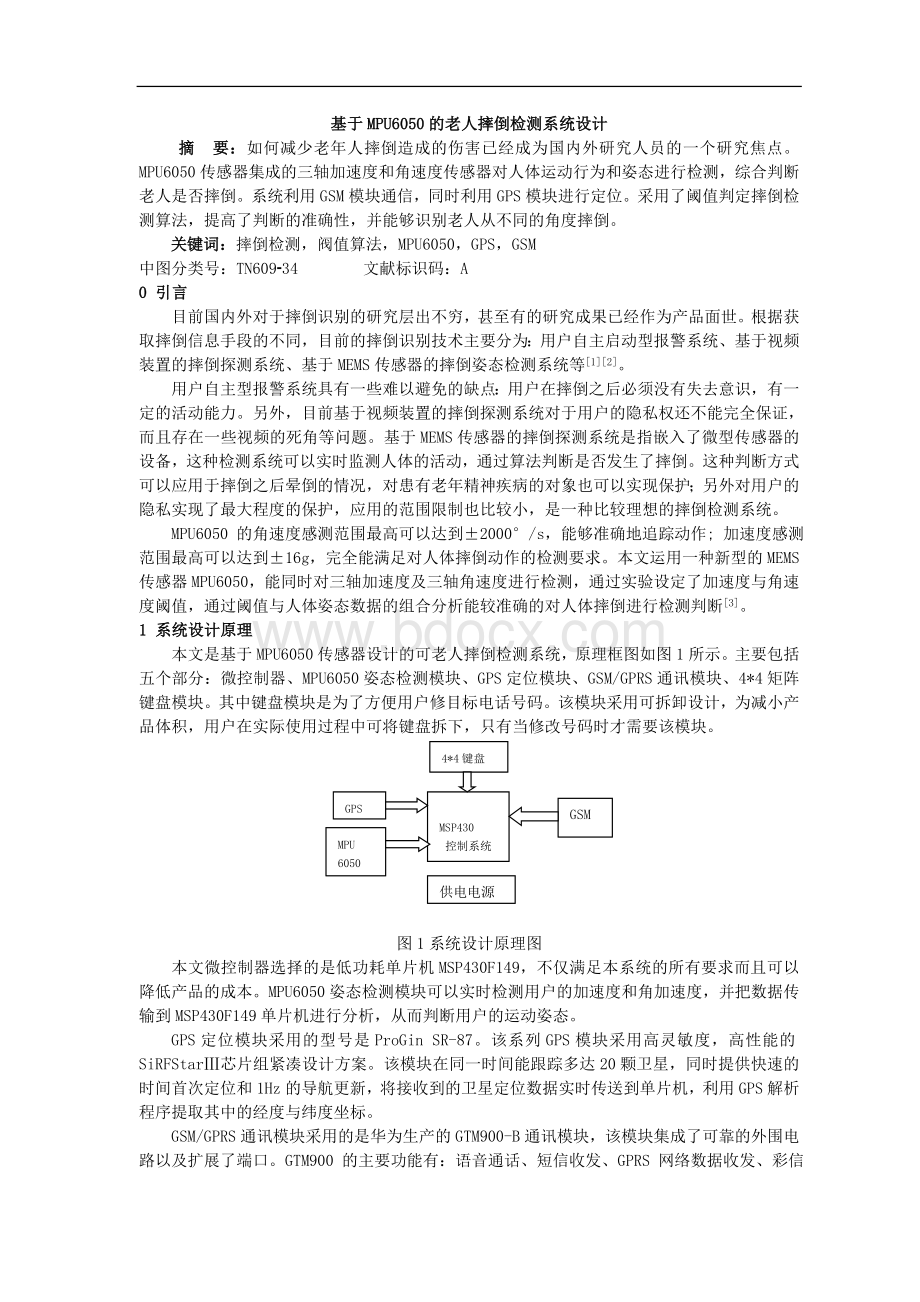
本文是基于MPU6050传感器设计的可老人摔倒检测系统,原理框图如图1所示。
主要包括五个部分:
微控制器、MPU6050姿态检测模块、GPS定位模块、GSM/GPRS通讯模块、4*4矩阵键盘模块。
其中键盘模块是为了方便用户修目标电话号码。
该模块采用可拆卸设计,为减小产品体积,用户在实际使用过程中可将键盘拆下,只有当修改号码时才需要该模块。
MSP430
控制系统
GPS
MPU
6050
GSM
供电电源
4*4键盘
图1系统设计原理图
本文微控制器选择的是低功耗单片机MSP430F149,不仅满足本系统的所有要求而且可以降低产品的成本。
MPU6050姿态检测模块可以实时检测用户的加速度和角加速度,并把数据传输到MSP430F149单片机进行分析,从而判断用户的运动姿态。
GPS定位模块采用的型号是ProGinSR-87。
该系列GPS模块采用高灵敏度,高性能的SiRFStarⅢ芯片组紧凑设计方案。
该模块在同一时间能跟踪多达20颗卫星,同时提供快速的时间首次定位和1Hz的导航更新,将接收到的卫星定位数据实时传送到单片机,利用GPS解析程序提取其中的经度与纬度坐标。
GSM/GPRS通讯模块采用的是华为生产的GTM900-B通讯模块,该模块集成了可靠的外围电路以及扩展了端口。
GTM900的主要功能有:
语音通话、短信收发、GPRS网络数据收发、彩信收发,使用串口通讯的方式和外部连接。
该模块利用AT指令来发送求助短信。
当摔倒事件发生时,单片机控制该模块向目标手机发出警报以及摔倒的位置。
2姿态检测模块设计
姿态检测模块采用的是MPU6050传感器,是全球首例9轴运动处理传感器。
它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(DigitalMotionProcessor),可用IIC接口连接一个第三方的数字传感器,比如磁力计。
扩展之后就可以通过其IIC或SPI接口输出一个9轴的信号。
MPU6050对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。
为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±
250,±
500,±
1000,±
/秒(dps),加速度计可测范围为±
2,±
4,±
8,±
16g。
陀螺仪MPU6050是采用IIC的协议通信的,通过寄存器地址进行访问。
MPU6050电路图如图2所示,5V/3.3V电源输入,XDA/XCL用于外接其他IIC接口传感器,不用。
SDA,SCL连接到单片机,INT产生中断信号,连接至单片机。
AD0一般接地。
注意使用IO口模拟IIC信号时候,要注意SDA所连接的单片机IO口输入输出方向设置。
图2MPU6050电路原理图
3系统算法设计
3.1姿态检测算法
MPU6050采用标准的IIC通信协议实时的向单片机传送用户姿态数据,包括三轴加速度与三轴角速度信息,单片机通过算法分析数据,从而判断用户运动姿态。
目前对摔倒进行判断主要有两种方法,分别是基于模式识别的摔倒检测方法和基于预设阔值的摔倒检测方法。
在摔倒检测算法的选择上,由于模式识别的方法有较大的计算量,不适于实时系统,因此本文选择阀值判断的方法进行摔倒检测。
同时由于传统的阀值判断的方法容易出现很多错判和漏判,本文对算法作进一步改进引入人体运动的角速度加以分析判断,提高判断准确率。
算法流程如图3所示。
根据运动学分析,一个典型的摔倒动作曲线主要由人体失重过程,人体与地面的碰撞和人体相对地面静止3部分组成。
基于这3个过程建立了一种摔倒检测算法,把加速度变化和角速度变化分别进行判断,再将输出的判断结果与静止后的人体姿态进行综合分析,最终生成对是否发生严重摔倒动作的判断。
图3摔倒检测的阈值算法流程
3.2GPS数据解析算法
GPS数据解析算法流程如图4所示。
图4GPS数据解析算法
由于从GPS串口接收的数据帧是一长串ASCII码字节流,在没有经过分类提取之前是无法加以利用的。
因此,必须通过程序将各个字段的信息从接收到的字节流中提取出来,将其转化成有实际意义的,可供高层决策使用的定位信息数据。
对GPS信息进行提取必须首先明确其帧结构,数据帧主要由帧头、帧尾和帧内数据组成。
对于不同的数据帧,其帧头是不同的,主要有“$GPGGA”、“$GPGSA”、“$GPGSV”以及“$GPRMC"
等。
这些帧头标识了后续帧内数据的组成和结构特点。
各帧均以回车符和换行符作为帧尾,标识一帧的结束。
4实验测试及分析
4.1准确度测试
由于摔倒的实验具有一定的危险性,所以仍然选择年轻人作为实验的对象。
实验对象为23周岁男性一名,23周岁女性一名。
设定FF为向前摔倒,膝盖弯曲,膝盖先着地;
FA为向后摔倒,臀部先着地;
FA为向左侧摔倒,膝盖弯曲;
FR为向右侧摔倒,膝盖弯曲。
其中每种模式各测50次,膝盖着地是为了更加贴近实际摔倒的情况。
表1为各种模式下的摔倒检测情况。
表1摔倒的检测成功统计结果
FF
FA
FL
FR
男
50
48
49
女
46
从表中可以看出,该算法对摔倒具有相当的敏感性,其中FF模式的预测准确程度最高,对于FA、FL、FR都有一定程度的漏报,这与实验对象以及实验条件都有一定的关系。
人体有意识的摔倒和无意识摔倒时身体的反应是有所不同的,再加上实验条件不能绝对的保证测试者在摔倒的过程中完全不产生伤害,所以实验的准确性并不能达到100%。
实际上该算法对摔倒有较高的敏感性,系统的检测成功率还是比较高的。
4.2日常运动误判测试
该摔倒检测系统的一个重要设计原则是在没有误报的情况下保证足够的成功率。
因为如果在日常生活中使用该装置经常出现误报势必会给用户造成很困扰。
表2为实验的误报情况统计。
其中走的时间为30分钟,跑步的时间为30分钟,上楼和下楼的次数各为50次,坐下和蹲下各100次,电梯为50次,高处跳落50次。
表2日常运动模式的误判统计
走路
跑步
上楼
下楼
坐下
蹲下
电梯
跳落
1
2
4
从上述的误判情况统计表中可以看出,在人体的几项活动中,从高处跳落的误报率比较高,其他几项几乎没有出现误判。
考虑到应用的群体是老年人,跳落属于危险性的动作,一般不会发生,所以出现误报是可以接受的。
电梯模式是前面的实验中未列出的运动模式,经过实验发现该摔倒检测系统在电梯中未出现误报,所以可以看出系统的误判率是非常低的。
综上所述,该系统在性能上可靠的,误判程度很低,对摔倒的敏感程度很高。
5结论
本文为了精确识别老人的摔倒动作,基于MPU6050模块,采用了阈值判定摔倒检测算法,设计的算法利用加速度信号和角速度信号联合判断摔倒状态,提高了摔倒状态判断的准确性,并能够识别老人从不同的角度摔倒。
这对老人的生命安全提供了一定的保障,同时也减轻了现代社会年轻人陪护老人的压力。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 MPU6050 老人 摔倒 检测 系统 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 保育笔记.doc
保育笔记.doc
-
北京地区成人学士学位英语统一考试真题及答案.docx
-
幼儿园外出活动安全应急预案.doc
-
形容词变副词规律.doc
-
新概念英语第一册阶段测试题(01--12).doc
-
中班幼儿发展分析报告.doc
-
新概念英语第一册Lesson1-20测试题.doc
-
幼儿园安全教育宣传稿2-3月份.doc
-
描写山水风光的古诗词.doc
-
大学英语B题库阅读四.doc
 幼儿园日常安全检查记录表.xls
幼儿园日常安全检查记录表.xls
-
汽车涂装术语中英文对照.xls
-
1993年全国高考数学试题.doc
-
-简谐运动的图像.doc
-
幼儿园教职工安全培训记录.wps
-
世界主要国家及首都对照表(中英文).doc
-
-渗透作用原理说课稿.doc
-
电大远程网络教育大学英语B统考题库真题.doc
-
2010年江苏省高考化学试卷及解析.doc
-
2012年辽宁省高考数学试卷(文科)答案与解析.doc
-
2006年全国化学竞赛初赛模拟试卷(02).doc
-
幼儿园一日常规检查记录表.xls
-
自考英语二教材课文讲义unit.docx
-
全国高等教育自学考试英语词汇学试题及答案.doc
-
18年高考真题理科数学(全国2卷).doc
-
2008高中化学竞赛初赛模拟试卷(11).doc
-
2012年6月福建省高中生物会考试题.doc
-
1989年全国高考数学文科.doc
-
1994年全国高考数学试题.doc
-
2011年浙江普通高中学业水平考试通用技术试卷及答案.doc
-
1997年全国高中学生化学竞赛(初赛)试题.doc
-
2011年辽宁省高考数学试卷(理科)答案与解析.doc
-
94区石方路基填筑开工报告Word文档格式.docx
-
关于高一叙事优秀作文800字精选范文五篇Word格式.docx
-
企业节约用电研究Word格式.docx
-
个人销售上半年工作总结报告Word文档下载推荐.docx
-
植树节活动方案汇总6篇Word文件下载.docx
-
细胞库建立标准Word文档下载推荐.docx
-
《上海市城市总体规划》概要Word文档格式.docx
-
牛津上海版五下M1 Unit1 What a mess 知识梳理 学生版文档格式.docx
-
的无线电设备监管系统的设计及开发Word下载.docx
-
闫大小学寄宿制学校安全管理制度汇编Word文档格式.docx
-
K12教育学习资料学习八年级道德与法治下册 第二单元 理解权利义务 第三课 公民权Word下载.docx
-
年产10万吨生物柴油技改项目可行性研究报告文档格式.docx
-
三年级计算专项训练考后反思Word下载.docx
-
业务操作A答案卷Word格式.docx
-
房屋买卖合同协议书简单版Word文档格式.docx
-
新闻专业实习报告模板0Word文档格式.docx
-
南开大学《主干课1药剂学》春主干课考试Word文档格式.docx
-
可编程序控制器技术及应用教学指南西门子系列Word文档下载推荐.docx
-
隧道工程的施工步骤隧道施工准备洞口明洞施工方案Word格式.docx
