 PID校正Word文档格式.docx
PID校正Word文档格式.docx
- 文档编号:15404354
- 上传时间:2022-10-30
- 格式:DOCX
- 页数:5
- 大小:1.44MB
PID校正Word文档格式.docx
《PID校正Word文档格式.docx》由会员分享,可在线阅读,更多相关《PID校正Word文档格式.docx(5页珍藏版)》请在冰豆网上搜索。
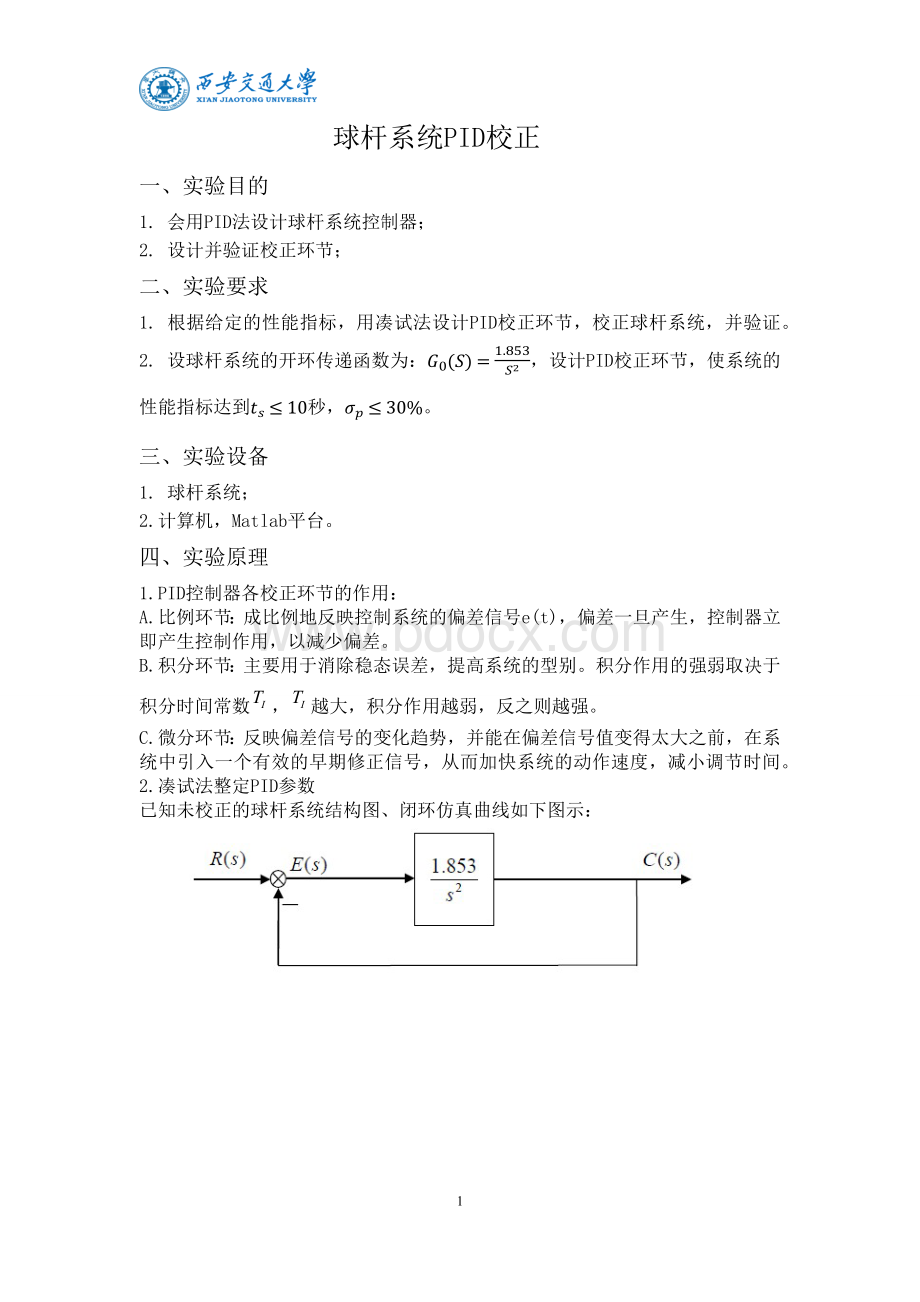
G0(S)=1.853S2,设计PID校正环节,使系统的性能指标达到ts≤10秒,σp≤30%。
三、实验设备
1.球杆系统;
2.计算机,Matlab平台。
四、实验原理
1.PID控制器各校正环节的作用:
A.比例环节:
成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制器立即产生控制作用,以减少偏差。
B.积分环节:
主要用于消除稳态误差,提高系统的型别。
积分作用的强弱取决于积分时间常数,越大,积分作用越弱,反之则越强。
C.微分环节:
反映偏差信号的变化趋势,并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
2.凑试法整定PID参数
已知未校正的球杆系统结构图、闭环仿真曲线如下图示:
从仿真曲线看出未校正系统震荡不稳定。
设球杆系统PID校正的结构图为如图2.2.5示:
要求采用凑试法设计PID校正环节,使系统性能指标达到调节时间小于10秒,超调量30%。
五、实验结果
1.未校正系统仿真
在MATLABSimulink中构建如下图所示系统的仿真框图,加入阶跃信号。
下图为得到的系统仿真曲线:
闭环系统系统震荡,必须设计控制器使系统稳定。
2.PID校正法仿真
最终控制程序如下图所示。
设置Kp=1.5,Ki=0.3,Kd=1.5
最终得到的系统仿真曲线:
从图上读得超调量20%,调节时间3.15秒,满足系统要求。
3、PID实时控制
实时控制界面
位移响应曲线
六.实验记录
控制器参数
性能指标
未校正系统
震荡,不稳定
校正系统仿真
kp=1.5ki=0.3kd=1.5
σ=20%,ts=3.15秒
校正系统实例
kp=1.5ki=0.3kd=1.5=
σ=52%,ts=22秒
七.实验分析
1、怎样确定PID控制器的参数?
答:
1、先设定比例参数。
若测量值在调整时趋势出现的波动次数较多,则放大比例参数;
若趋势平缓且变化较慢,则缩小比例参数。
2、比例参数设定好以后,设定积分参数,若测量值在调整时趋势出现的波动次数较多,则缩小积分参数;
若趋势平缓且变化较慢,则放大积分参数。
3、比例和积分参数设定好以后,设定微分参数。
若测量值在调整时趋势出现的波动次数较多,则放大微分参数;
若趋势平缓且变化较慢,则缩小微分参数。
2、为什么系统仿真的结果和实时控制的结果相差很大?
为什么当PID参数取某些值的时候(如Kp=10,Ki=0,Kd=10),仿真结果很好,但实时控制时系统却震荡不稳定?
系统仿真建立的模型是对实时系统的简化,忽略了许多线性或非线性的因素,但这些因素对结果是有影响的,这些因素包括:
运动副的摩擦,测量装置的误差,电机控制系统误差,信号采集系统的延时等。
当PID参数取某些值的时候,对于所建模型而言,校正效果是好的,但由于模型是一种简化,模型与实际系统之间还存在偏差,这些值对于实际系统还不是有效参数,所以实时系统会震荡不稳定。
3、为什么工业中PID控制能有广泛的应用?
首先,PID应用范围广。
虽然很多工业过程是非线性或时变的,但通过对其简化可以变成基本线性和动态特性不随时间变化的系统,这样PID就可控制了。
其次,PID参数较易整定。
也就是,PID参数Kp,Ki和Kd可以根据过程的动态特性及时整定。
如果过程的动态特性变化,例如可能由负载的变化引起系统动态特性变化,PID参数就可以重新整定。
第三,PID控制器在实践中也不断的得到改进。
5


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- PID 校正
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 保育笔记.doc
保育笔记.doc
-
北京地区成人学士学位英语统一考试真题及答案.docx
-
幼儿园外出活动安全应急预案.doc
-
形容词变副词规律.doc
-
新概念英语第一册阶段测试题(01--12).doc
-
中班幼儿发展分析报告.doc
-
新概念英语第一册Lesson1-20测试题.doc
-
幼儿园安全教育宣传稿2-3月份.doc
-
描写山水风光的古诗词.doc
-
大学英语B题库阅读四.doc
 幼儿园日常安全检查记录表.xls
幼儿园日常安全检查记录表.xls
-
汽车涂装术语中英文对照.xls
-
1993年全国高考数学试题.doc
-
-简谐运动的图像.doc
-
幼儿园教职工安全培训记录.wps
-
世界主要国家及首都对照表(中英文).doc
-
-渗透作用原理说课稿.doc
-
电大远程网络教育大学英语B统考题库真题.doc
-
2010年江苏省高考化学试卷及解析.doc
-
2012年辽宁省高考数学试卷(文科)答案与解析.doc
-
2006年全国化学竞赛初赛模拟试卷(02).doc
-
幼儿园一日常规检查记录表.xls
-
自考英语二教材课文讲义unit.docx
-
全国高等教育自学考试英语词汇学试题及答案.doc
-
18年高考真题理科数学(全国2卷).doc
-
2008高中化学竞赛初赛模拟试卷(11).doc
-
2012年6月福建省高中生物会考试题.doc
-
1989年全国高考数学文科.doc
-
1994年全国高考数学试题.doc
-
2011年浙江普通高中学业水平考试通用技术试卷及答案.doc
-
1997年全国高中学生化学竞赛(初赛)试题.doc
-
2011年辽宁省高考数学试卷(理科)答案与解析.doc
-
学校青年教师练课听评课心得精选多篇Word格式文档下载.docx
-
消防主题活动方案精选6篇Word文件下载.docx
-
届高考语文二轮专题复习教案专题十名篇名句默写文档格式.docx
-
药厂实习报告Word格式文档下载.docx
-
暖心的运动会加油稿精选Word文档下载推荐.docx
-
allegro使用汇总Word文件下载.docx
-
湘教版小学三年级下册音乐教案Word下载.docx
-
中考物理力与运动的关系问题大题培优 易错 难题含详细答案Word格式.docx
-
校园交通安全伴我行征文内容Word文档格式.docx
-
最新北师大版小学英语三年级上册教案文档格式.docx
-
幼儿园园本培训总结Word文档下载推荐.docx
-
自信心团体辅导策划书111Word文件下载.docx
-
原发性甲旁亢的临床表现之欧阳物创编Word格式.docx
-
最新住院病历检查评分标准Word格式文档下载.docx
-
新年新希望演讲稿范文合集十篇Word文档下载推荐.docx
-
最新考研法硕法学专业课真题详解Word格式.docx
-
《个人与团队管理》课程模拟题一 解析版Word下载.docx
-
029产品质量回顾分析标准管理操作规程Word文档格式.docx
-
志愿者心得体会800字文档格式.docx
