 ABB机器人坐标系说明介绍Word文档格式.doc
ABB机器人坐标系说明介绍Word文档格式.doc
- 文档编号:15268371
- 上传时间:2022-10-29
- 格式:DOC
- 页数:5
- 大小:272KB
ABB机器人坐标系说明介绍Word文档格式.doc
《ABB机器人坐标系说明介绍Word文档格式.doc》由会员分享,可在线阅读,更多相关《ABB机器人坐标系说明介绍Word文档格式.doc(5页珍藏版)》请在冰豆网上搜索。
坐标系从一个称为原点的固定点通过轴定义平面或空间。
机器人目标和位置通过沿坐标系轴的测量来定位.
机器人使用若干坐标系,每一坐标系都适用于特定类型的微动控制或编程。
·
基坐标系位于机器人基座。
它是最便于机器人从一个位置移动到另一个位置的坐标系。
详情请参阅基坐标系.
工件坐标系与工件相关,通常是最适于对机器人进行编程的坐标系。
详情请参阅工件坐标系.
工具坐标系定义机器人到达预设目标时所使用工具的位置。
详情请参阅工具坐标系.
大地坐标系可定义机器人单元,所有其他的坐标系均与大地坐标系直接或间接相关。
它适用于微动控制、一般移动以及处理具有若干机器人或外轴移动机器人的工作站和工作单元。
详情请参阅大地坐标系.
用户坐标系在表示持有其他坐标系的设备(如工件)时非常有用。
详情请参阅用户坐标系.
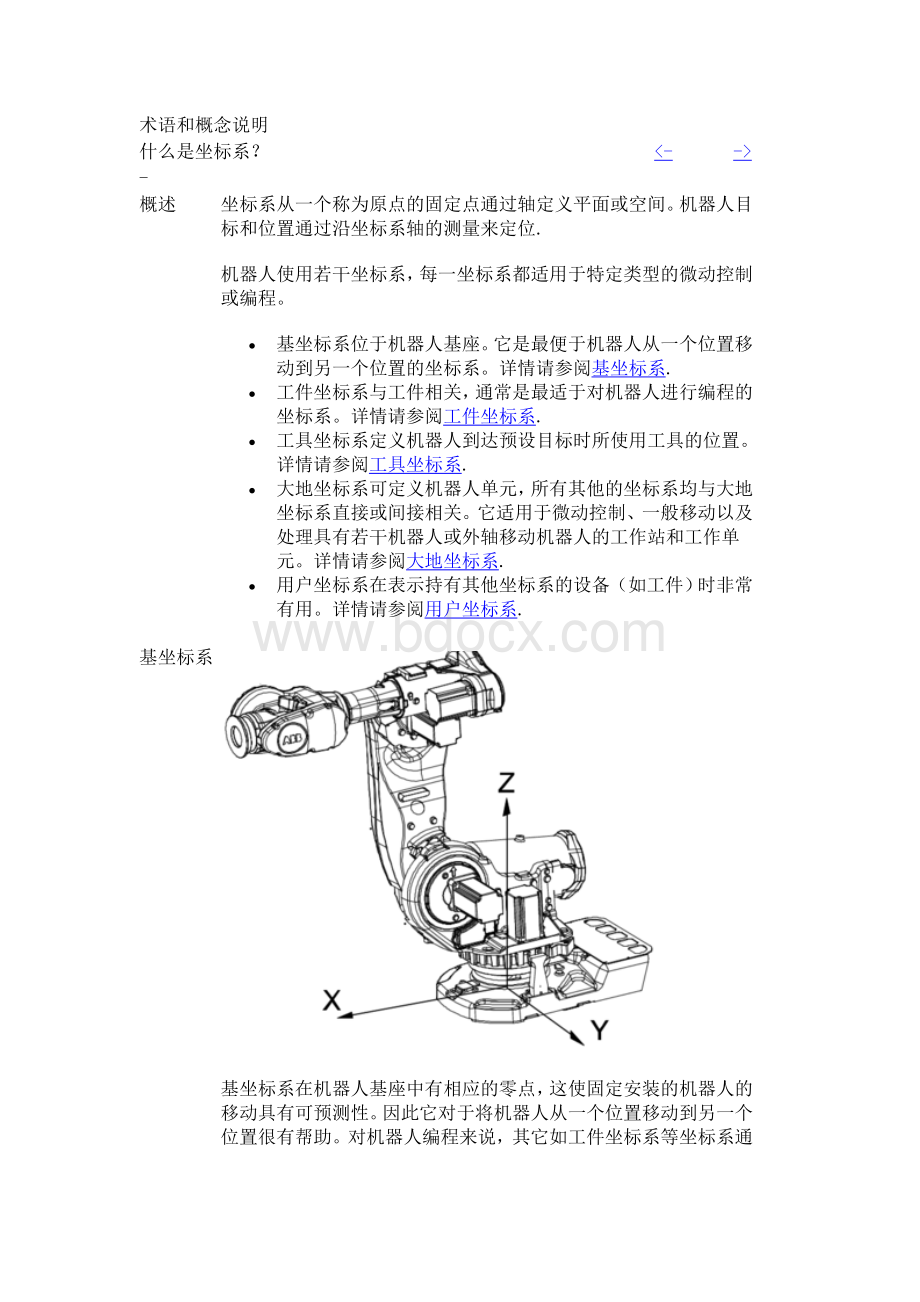
基坐标系
基坐标系在机器人基座中有相应的零点,这使固定安装的机器人的移动具有可预测性。
因此它对于将机器人从一个位置移动到另一个位置很有帮助。
对机器人编程来说,其它如工件坐标系等坐标系通常是最佳选择。
详情请参阅工件坐标系.
在正常配置的机器人系统中,当您站在机器人的前方并在基坐标系中微动控制,将控制杆拉向自己一方时,机器人将沿X轴移动;
向两侧移动控制杆时,机器人将沿Y轴移动。
扭动控制杆,机器人将沿Z轴移动.
大地坐标系
A
机器人1基坐标系
B
C
机器人2基坐标系
大地坐标系在工作单元或工作站中的固定位置有其相应的零点。
这有助于处理若干个机器人或由外轴移动的机器人.
在默认情况下,大地坐标系与基坐标系是一致的.
工件坐标系
工件坐标系1
工件坐标系2
工件坐标系对应工件:
它定义工件相对于大地坐标系(或其它坐标系)的位置.
工件坐标系必须定义于两个框架:
用户框架(与大地基座相关)和工件框架(与用户框架相关).
机器人可以拥有若干工件坐标系,或者表示不同工件,或者表示同一工件在不同位置的若干副本.
您对机器人进行编程时就是在工件坐标系中创建目标和路径。
这带来很多优点:
:
重新定位工作站中的工件时,您只需更改工件坐标系的位置,所有路径将即刻随之更新.
允许操作以外轴或传送导轨移动的工件,因为整个工件可连同其路径一起移动.
位移坐标系
原始位置
新位置
D
有时,会在若干位置对同一对象或若干相邻工件执行同一路径。
为了避免每次都必须为所有位置编程,可以定义一个位移坐标系。
此坐标系还可与搜索功能结合使用,以抵消单个部件的位置差异。
位移坐标系基于工件坐标系而定义。
工具坐标系
工具坐标系将工具中心点设为零位。
它会由此定义工具的位置和方向。
工具坐标系经常被缩写为TCPF(ToolCenterPointFrame),而工具坐标系中心缩写为TCP(ToolCenterPoint).
执行程序时,机器人就是将TCP移至编程位置。
这意味着,如果您要更改工具(以及工具坐标系),机器人的移动将随之更改,以便新的TCP到达目标.
所有机器人在手腕处都有一个预定义工具坐标系,该坐标系被称为tool0。
这样就能将一个或多个新工具坐标系定义为tool0的偏移值.
微动控制机器人时,如果您不想在移动时改变工具方向(例如移动锯条时不使其弯曲),工具坐标系就显得非常有用.
用户坐标系
移动用户坐标系
E
工件坐标系,与用户坐标系一同移动
用户坐标系可用于表示固定装置、工作台等设备。
这就在相关坐标系链中提供了一个额外级别,有助于处理持有工件或其它坐标系的处理设备.


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- ABB 机器人 坐标系 说明 介绍
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 保育笔记.doc
保育笔记.doc
-
北京地区成人学士学位英语统一考试真题及答案.docx
-
幼儿园外出活动安全应急预案.doc
-
形容词变副词规律.doc
-
新概念英语第一册阶段测试题(01--12).doc
-
中班幼儿发展分析报告.doc
-
新概念英语第一册Lesson1-20测试题.doc
-
幼儿园安全教育宣传稿2-3月份.doc
-
描写山水风光的古诗词.doc
-
大学英语B题库阅读四.doc
 幼儿园日常安全检查记录表.xls
幼儿园日常安全检查记录表.xls
-
汽车涂装术语中英文对照.xls
-
1993年全国高考数学试题.doc
-
-简谐运动的图像.doc
-
幼儿园教职工安全培训记录.wps
-
世界主要国家及首都对照表(中英文).doc
-
-渗透作用原理说课稿.doc
-
电大远程网络教育大学英语B统考题库真题.doc
-
2010年江苏省高考化学试卷及解析.doc
-
2012年辽宁省高考数学试卷(文科)答案与解析.doc
-
2006年全国化学竞赛初赛模拟试卷(02).doc
-
幼儿园一日常规检查记录表.xls
-
自考英语二教材课文讲义unit.docx
-
全国高等教育自学考试英语词汇学试题及答案.doc
-
18年高考真题理科数学(全国2卷).doc
-
2008高中化学竞赛初赛模拟试卷(11).doc
-
2012年6月福建省高中生物会考试题.doc
-
1989年全国高考数学文科.doc
-
1994年全国高考数学试题.doc
-
2011年浙江普通高中学业水平考试通用技术试卷及答案.doc
-
1997年全国高中学生化学竞赛(初赛)试题.doc
-
2011年辽宁省高考数学试卷(理科)答案与解析.doc
-
多功能电子时钟.docx
-
房地产评估报告模板1.docx
-
广州市财政投资评审中心第一次招聘试题及答案解析 doc.docx
-
规划设计类参考书目.docx
-
贵州大学浙江大学科研合同管理办法.docx
-
古诗词鉴赏表达技巧艺术手法教案.docx
-
管家部工作计划.docx
-
国家职业资格pmp项目管理考试考试试题及答案解析.docx
-
合同法案例分析及解析.docx
-
国家奖学金申请书经典范文6篇.docx
-
环境保护和职业健康安全保证措施.docx
-
华硕S400拆机及解疑.docx
-
化工企业静电接地设计规程30843.docx
-
小升初语文基础知识复习专题训练成语.docx
-
环境工程微生物实验指导.docx
-
ACE面板布置制作.docx
-
UPS不间断电源系统操作指南.docx
-
基于单片机的红外遥控智能小车毕业设计报告.docx
-
八大品牌镜头技术标识讲解.docx
