 方位角计算公式Word文档格式.docx
方位角计算公式Word文档格式.docx
- 文档编号:15103838
- 上传时间:2022-10-27
- 格式:DOCX
- 页数:18
- 大小:147KB
方位角计算公式Word文档格式.docx
《方位角计算公式Word文档格式.docx》由会员分享,可在线阅读,更多相关《方位角计算公式Word文档格式.docx(18页珍藏版)》请在冰豆网上搜索。
3、坐标方位角的推算 测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有 =++ (1-14) 设三点相关位置如图1-17()所示,应有 =++-=+- (1-15) 若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:
=+ (1-16) 显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式 =- (1-17) 上二式右端,若前两项计算结果<
,前面用“+”号,否则前面用“-”号。
二、坐标推算 1、坐标的正算 地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:
XB=XA+ΔXAB YB=YA+ΔYAB 式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
由图1中,根据三角函数,可写出坐标增量的计算公式为:
ΔXAB=DAB·
cosαAB ΔYAB=DAB·
sinαAB 式中ΔX、ΔY均有正、负,其符号取决于直线的坐标方位角所在的象限,参见表1-5。
表1-5 不同象限坐标增量的符号
坐标方位角及其所在象限
之符号
(第一象限)(第二象限)(第三象限)(第四象限)
+ - - +
++--
2、坐标的反算 根据、两点的坐标、和、,推算直线的水平距离与坐标方位角,为坐标反算。
由图1可见,其计算公式为:
= (1-20) = (1-21) 注意,由(1-20)式计算时往往得到的是象限角的数值,必须参照表1-5表1-4,先根据、的正、负号,确定直线所在的象限,再将象限角化为坐标方位角。
例如、均为-1。
这时由(1-20)式计算得到的数值为,但根据、的符号判断,直线应在第三象限。
因此,最后得==,余类推。
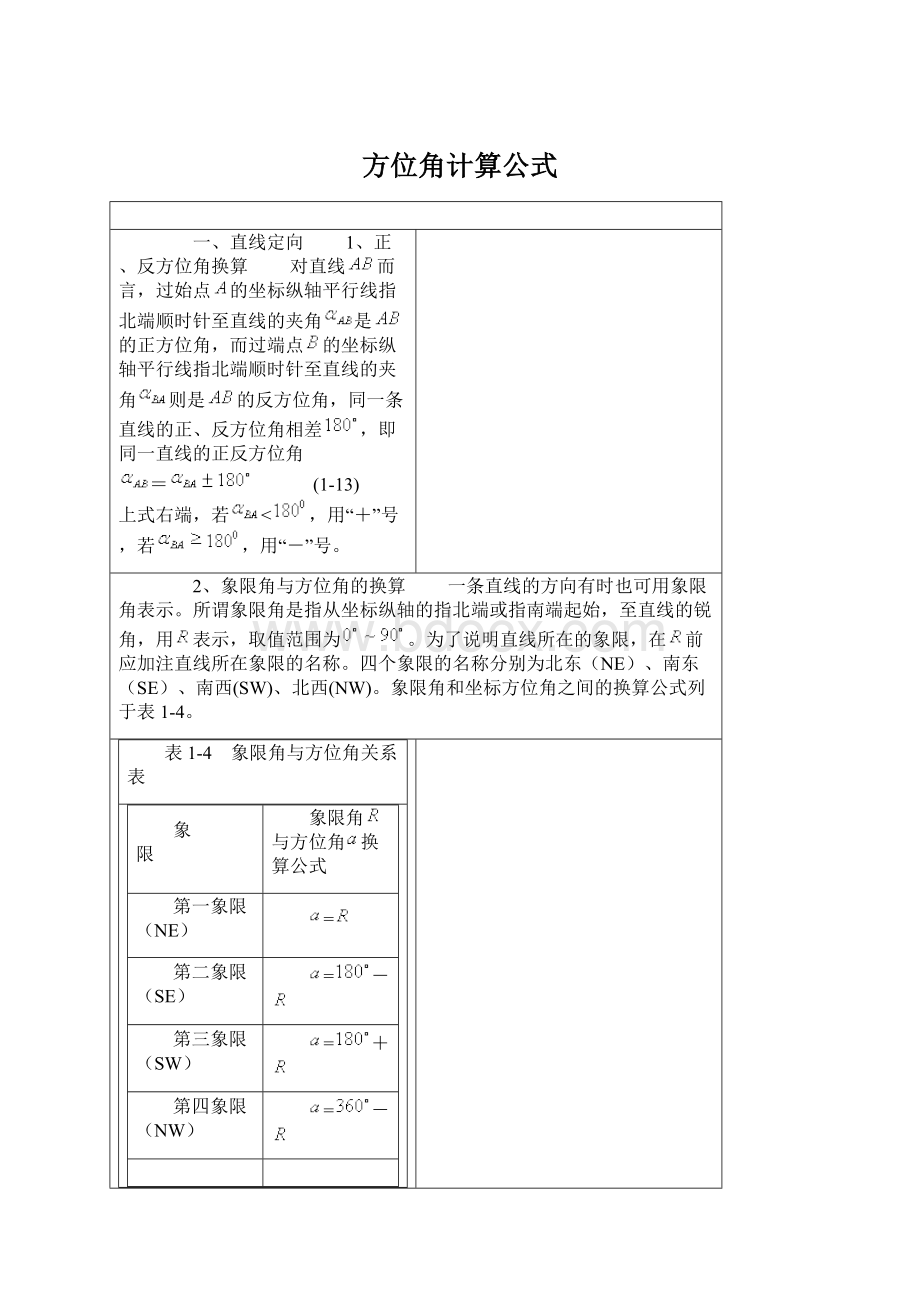
表1-4 象限角与方位角关系表
三、举例 1、某导线12边方位角为45°
,在导线上2点测得其左角为250°
,求α32?
解:
1)23边的方位角:
根据公式=+ 因α12=250°
,α12>180°
, 故计算公式中,前面应取“-”号:
α23=α12+- =45°
+250°
-180°
=115°
2)求α23反方位角:
根据公式=,本例α23<180°
,故前面应取“+”号:
α32=α23+=295°
当前位置:
--
一、水准测量内业的方法:
水准测量的内业即计算路线的高差闭合差,如其符合要求则予以调整,最终推算出待定点的高程。
1.高差闭合差的计算与检核 附合水准路线高差闭合差为:
=-() (2-8) 闭合水准路线高差闭合差为:
= (2-9) 为了检查高差闭合差是否符合要求,还应计算高差闭合差的容许值(即其限差)。
一般水准测量该容许值规定为 平地 =mm 山地 =mm (2-11) 式中,―水准路线全长,以km为单位;
―路线测站总数。
2.高差闭合差的调整 若高差闭合差小于容许值,说明观测成果符合要求,但应进行调整。
方法是将高差闭合差反符号,按与测段的长度(平地)或测站数(山地)成正比,即依下式计算各测段的高差改正数,加入到测段的高差观测值中:
⊿=- (平地) ⊿=- (山地) 式中, ―路线总长;
―第测段长度(km) (=1、2、3...);
―测站总数;
―第测段测站数。
3.计算待定点的高程 将高差观测值加上改正数即得各测段改正后高差:
hi改=hi+⊿hii=1,2,3,…… 据此,即可依次推算各待定点的高程。
如上所述,闭合水准路线的计算方法除高差闭合差的计算有所区别而外,其余与附合路线的计算完全相同。
二、举例 1.附合水准路线算例 下图2-18所示附合水准路线为例,已知水准点A、B和待定点1、2、3将整个路线分为四个测段。
表 2-2附合水准路线计算
测段号
点名
测站数
观测高差/m
改正数/m
改正后高差/m
高程/m
备注
1
2
3
4
5
6
7
8
BM1
+
-
BM2
20
+
辅助计算
=+==54mm
1)将点名、各测段测站数、各测段的观测高差、已知高程数填入表2-2内相应栏目2、3、4、7(如系平地测量,则将测站数栏改为公里数栏,填入各测段公里数;
表内加粗字为已知数据)。
2)进行高差闭合差计算:
=-()=--=+ 由于图中标注了测段的测站数,说明是山地观测,因此依据总测站数计算高差闭合差的容许值为:
===54mm 计算的高差闭合差及其容许值填于表2-2下方的辅助计算栏。
3)高差闭合差的调整 fh≤fh容,故其精度符合要求。
本例中,将高差闭合差反符号,按下式依次计算各测段的高差改正数:
⊿=- (―测站总数,―第测段测站数) 第一测段的高差改正数为:
⊿=-14mm 同法算得其余各测段的高差改正数分别为-5、-7、-8mm,依次列入表2-2中第5栏。
注:
1、所算得的高差改正数总和应与高差闭合差的数值相等,符号相反,以此对计算进行校核。
如因取整误差造成二者出现小的较差可对个别测段高差改正数的尾数适当取舍1mm,以满足改正数总和与闭合差数值相等的要求。
2、若为平地,高差改正数按各测段长度比例分配:
用公式⊿=-计算,式中,―路线总长;
―第测段长度(km) (=1、2、3...)。
4)计算待定点的高程 将高差观测值加上改正数即得各测段改正后高差:
hi改=hi+⊿hii=1,2,3,4 据此,即可依次推算各待定点的高程。
(上例计算结果列入表2-2之第6、7栏)。
H1=HA+H1改 H2=H1+H2改 …… HB(算)=HB(已知) 注:
改正后的高差代数和,应等于高差的理论值(HB-HA),即:
∑h改=HB-HA。
如不相等,说明计算中有错误存在。
最后推出的终点高程应与已知的高程相等。
2闭合水准路线算例 闭合水准路线的计算方法除高差闭合差的计算有所区别而外,其余与附合路线的计算完全相同。
计算时应当注意高差闭合差的公式为:
fh=∑h测。
如图2所示一闭合水准路线,A为已知水准点,A点高程为,,其观测成果如图中所示,计算1、2、3各点的高程。
将图中各数据按高程计算顺序列入表2进行计算:
表2水准测量成果计算表
观测高差/m
改正数 /mm
改正后高差/m
BMA
11
BMB
32
=30mm=mm=±
68mm
计算步骤如下:
⑴计算实测高差之和∑h测= =-==30mm ⑶计算容许闭合差fh容==±
68mm fh≤fh容,故其精度符合要求,可做下一步计算。
⑷计算高差改正数 高差闭合差的调整方法和原则与符合水准路线的方法一样。
本例各测段改正数vi计算如下:
⊿=-(fh/∑n)×
n1=-(-17/32)×
11=6mm ⊿h2=-(fh/∑n)×
n2=-(-17/32)×
8=4mm …… 检核∑⊿h=-fh=- ⑸计算改正后高差h改 各测段观测高差hi分别加上相应的改正数后⊿hi,即得改正后高差:
h1改=h1+⊿h1=-+= h2改=h2+⊿h2=+= …… 注:
改正后的高差代数和,应等于高差的理论值0,即:
∑h改=0,如不相等,说明计算中有错误存在。
⑹高程计算 测段起点高程加测段改正后高差,即得测段终点高程,以此类推。
最后推出的终点高程应与起始点的高程相等。
即:
H1=HA+h1改= H2=H1+h2改=+= …… HA(算)=HA(已知)= 计算中应注意各项检核的正确性。
:
一、经纬仪测回法测水平角 1、基本数据:
设、、为地面三点,为测定、两个方向之间的水平角,在O点安置经纬仪(图3-7),采用测回法进行观测。
1)上半测回(盘左)水平度盘读数:
目标:
=0°
02′06″, 目标:
=68°
49′18″;
2)下半测回(盘右)水平度盘读数:
=248″49′30″, 目标:
=180°
02′24″。
2、填表与计算:
1)将目标A、目标B水平度盘读数填入表3-1第4栏。
表3-1水平角观测手簿(测回法)
测站
目标
竖盘位置
水平度盘读数°
′″
半测回角值°
一测回角值°
备注
左
00206
684712
684709
684918
右
1800224
684706
2484930
2)计算半测回角,并将结果填入表3-1第5栏:
盘左:
== 盘右:


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 方位角 计算 公式
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《巴黎圣母院》3000字读书心得范文.docx
《巴黎圣母院》3000字读书心得范文.docx
-
《看上去很美》电影观后感5篇.docx
-
《房屋建筑学》复习题没答案.docx
-
《春》仿写作文8篇.docx
-
《关于提高农村学生小学语文中年段课外阅读能力的策略研究以古城小学为例》开题报告附课题项目申报表.docx
-
《海底两万里》读书笔记1000字精选多篇.docx
-
《三国演义》读后感1500字.docx
-
15教学4汉语教师资格等级考试.docx
-
《儿童如何学数学》读书笔记精选多篇.docx
-
《教育规划纲要》解读.docx
-
《房屋租赁合同》适用乙方模板1.docx
-
《你我他》教案.docx
-
《经济生活》练习题.docx
-
《侨联章程》.docx
-
《俗世奇人》高中读后感800字.docx
-
9A文信息安全复习题.docx
-
《选择希望人生》教案.docx
-
《创业基础》学习笔记与学习心得.docx
-
《杨氏之子》公开课教案.docx
-
13不符合项整改报告.docx
-
《节约用水珍惜水资源》综合实践活动案例.docx
-
56张从太空看地球的摄影照片.docx
-
《强制性产品认证管理办法》.docx
-
《廉颇蔺相如列传》4.docx
-
201X年安全标语大全word范文模板 17页.docx
-
《地学建模》作业.docx
-
22万亩油茶种植基地及吨年精制茶油生产线项目可行性研究报告书.docx
-
《谈生命》说课稿1.docx
-
《数字化城管系统建设导则》范文word版 12页.docx
-
72高考英语专题复习练习短文改错72.docx
-
《安全生产技术》真题 答案.docx
-
《现代通信网》阶段作业全解读.docx
-
一年级科学上册教案.docx
-
小学六年级数学教学计划.docx
-
汽车考证复习试题2.docx
-
共20套最新北师版八年级生物上册全册教案表格版教案汇总.docx
-
贯彻科学发展观推进法院反腐倡廉建设思考.docx
-
四年级下册科学 基础训练答案.docx
-
学年陕西省黄陵中学高二普通班上学期第三学月考试生物试题.docx
-
偷工减料的检讨书精选多篇范文word版 11页.docx
-
生态环境保护督察组关于大气污染问题整改报告.docx
-
七年级下综合实践专题训练.docx
-
苏教版小学五年级数学上册导学案全册.docx
-
汽车助力转向系统故障分析.docx
-
完整word版数据挖掘实验报告.docx
-
小学六年级语文教师个人述职报告范文共19页.docx
-
洗煤厂实习报告0.docx
-
端午节的祝福短信.docx
-
七年级政治下册 第五单元 第十一课 第二框 消除心理烦恼快乐成长学案鲁教版.docx
-
服装行业可行性研究报告.docx
-
二年级下册数学教案 61有余数的除法 人教新课标.docx
