 1213级虚拟仪器课程设计任务doc文档格式.docx
1213级虚拟仪器课程设计任务doc文档格式.docx
- 文档编号:15092120
- 上传时间:2022-10-27
- 格式:DOCX
- 页数:11
- 大小:273.25KB
1213级虚拟仪器课程设计任务doc文档格式.docx
《1213级虚拟仪器课程设计任务doc文档格式.docx》由会员分享,可在线阅读,更多相关《1213级虚拟仪器课程设计任务doc文档格式.docx(11页珍藏版)》请在冰豆网上搜索。
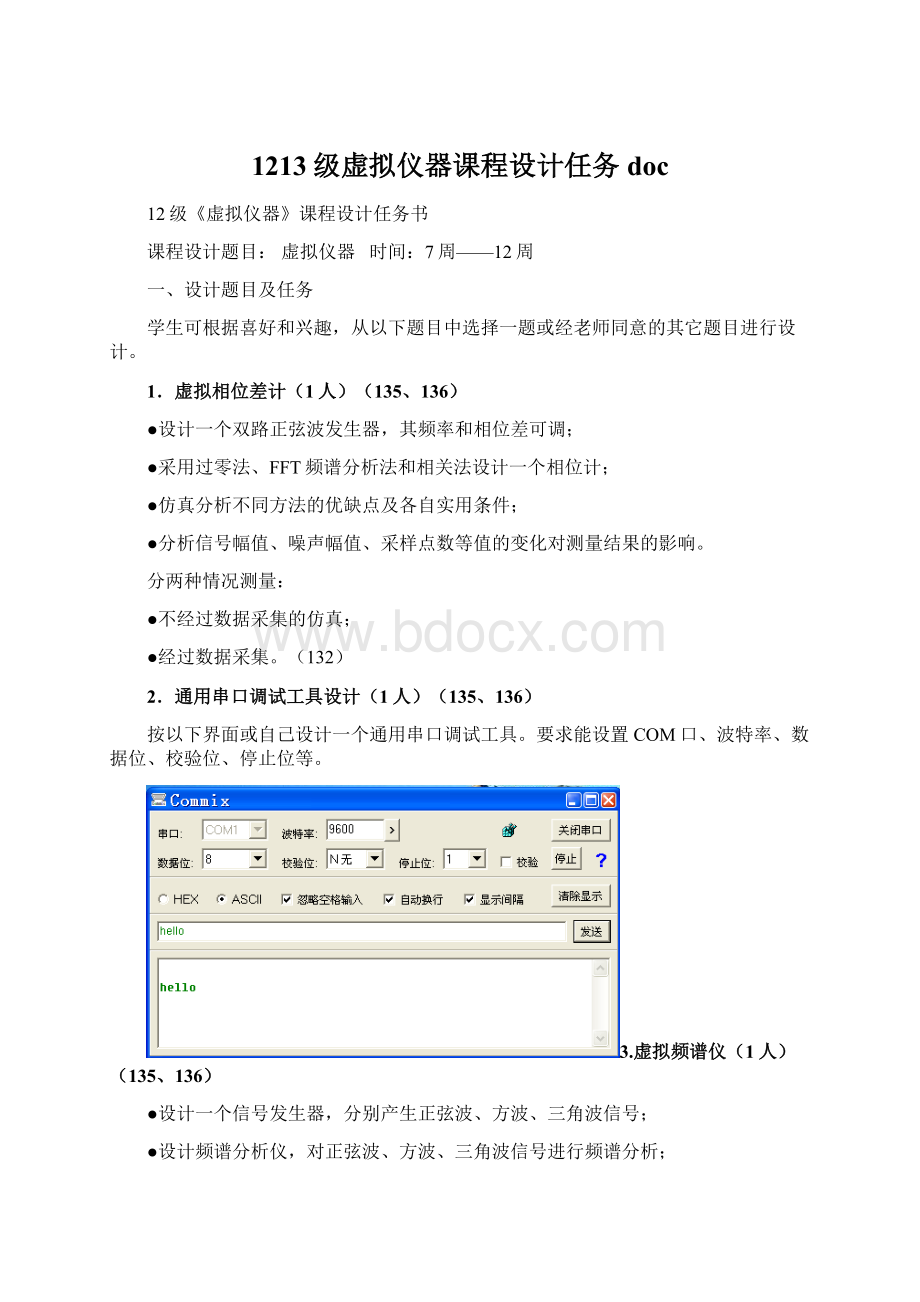
2.通用串口调试工具设计(1人)(135、136)
按以下界面或自己设计一个通用串口调试工具。
要求能设置COM口、波特率、数据位、校验位、停止位等。
3.虚拟频谱仪(1人)(135、136)
●设计一个信号发生器,分别产生正弦波、方波、三角波信号;
●设计频谱分析仪,对正弦波、方波、三角波信号进行频谱分析;
●产生叠加谐波,并分析叠加谐波的周期信号的频谱分析。
●非周期信号的频谱分析。
4.网络化虚拟仪器设计(1人)(135、136)
●建立一个虚拟波形发生器或其它虚拟仪器面板;
●采用B/S模式实现仪器的网络化控制。
●采用C/S模式实现仪器的网络化控制,可采用DataSocket或TCP/IP方式。
5.基于声卡的虚拟仪器设计(1人)(135、136)
●可测试信号、频谱;
●可回放记录数据的图形,回放速度可调;
●产生多种信号,频率幅值可调。
6.通用虚拟滤波器设计(1人)(135、136)
●建立一个虚拟波形发生器,要求信号频率连续可调;
●设计通用滤波器,能进行高通、低通、带通及带阻滤波;
●分析各种数字滤波器频率响应特性,及各种数字滤波器性能比较。
7.AppleWatch仿真设计(1人)(135、136)
设计AppleWatch界面,显示时间;
●设计连接天气、航班信息、播放音乐、测量心跳、计步、闹钟等功能键,及相关子界面及功能程序设计。
8.模拟汽车仪表盘的设计(1人)(135、136)
●模拟汽车控制面板,可以对显示面板中的参量进行控制;
●控制面板上带有车速表,
里程表,
转速表
,燃油表(初始油量设为300升,当油量低于30升时,油量指示器闪烁报警);
●左右转向灯,汽车转弯时,发出明暗交替的闪光信号,以表示汽车向左或向右转向行驶。
9.计算器设计(1人)(135、136)
按Windows系统附件中的计算器设计一个基于LabVIEW的计算器。
10.自动售货机(1人)(135、136)
自动售货机由三个投币口组成,可分别投入5角、1元、5元等三种硬币。
当购买一定数目的货物以后,在取物口取出商品,然后在退币口取出余额。
同时为了指示系统当前的状态,配有L1、L2指示灯,当系统出现错误时,会根据提前设定方式进行报警输出。
自动售货机界面请参见自动售货机示意图。
自动售货机示意图
11.锅炉温度监控系统的设计。
(1人)(132或135)RS232
●参考“锅炉温度控制实验平台”,根据温度控制原理进行系统设计;
●采用标准MODBUSRTU通讯协议通过计算机的RS232串行接口与锅炉温度控制实验平台的仪表通信获取锅炉温度反馈信号;
●用LabVIEW软件设计实时控制监视界面和控制算法,并通过RS232串行接口将控制信号输入仪表实现锅炉温度的控制;
●分析引起温度测量与控制误差的因素、及改进策略。
12.电机转速及角度控制的设计。
(1人)NIELVIS(132)
●参考“Quanser直流电机使用说明书”,采用NIELVIS实验平台,对电机转速控制系统进行设计;
●应用NIELVIS实验平台的DI口及AI口获取电机转速及角度信号;
●设计一个基于NIELVIS实验平台的电机转速及角度控制算法,实现转速及角度的精确控制;
●分析引起转速及角度测量与控制误差的因素、及改进策略。
13.智能数字PID调节器的设计(1人选)myDAQ(132)
●参考“智能PID调节器使用说明书”,采用myDAQ卡,根据智能PID调节器工作原理进行系统设计;
●应用myDAQ卡的AI口或DI口获取测量信号;
设计模拟信号采集、处理、输出及人机接口电路,可在线键盘参数设置、定时检测、显示、报警等;
●掌握PID控制规律及算法,应用myDAQ卡的AO口实现数字PID控制。
14.一阶倒立摆平衡控制的设计。
●参考“Quanser倒立摆使用说明书”,采用NIELVIS实验平台,根据一阶倒立摆控制原理进行系统设计;
●应用NIELVIS获取一阶倒立摆电机的角度及摆臂的角度信号;
●设计一阶倒立摆平衡控制算法,实现一阶倒立摆的平衡控制;
●分析引起摆臂震荡和编码器线缆和倒立摆臂出现缠绕的原因,提出改进的策略。
15.步进电机变频调速及角度和方向控制设计。
(1人)myDAQ(132)
●参考“步进电机使用说明书”,采用myDAQ卡,根据步进电机控制原理进行系统设计;
●应用myDAQ卡的DI口及AI口获取测量信号;
●控制步进电动机变频调速、方向及角度。
16.直流电机闭环调速控制设计。
(1人)myDAQ(132)
●参考“直流电机使用说明书”,采用myDAQ卡,根据直流电机控制原理进行系统设计;
●应用myDAQ卡的DIO口及AIO口获取测量信号并输出控制信号;
●掌握PID控制规律及算法
●实现直流电动机的闭环调速。
17.通用音乐播放器的虚拟仪器设计。
●要求用myDAQ播放多种格式的音乐文件;
●具有选择播放文件的功能,声音大小可调;
●能录音,并进行回复,任意设置播放位置;
●能显示音乐强度。
18.步进电动机角位移转为直线位移的位置测量与控制设计。
(1人)DAQ卡(132)
●参考“机电实验平台”,设计位置测量与控制系统;
●应用DAQ卡的DI口及AI口采集直线位移的位置信号,通过DAQ卡的DO及AO输出口控制步进电动机速度与方向;
●根据位置反馈信号,来调节步进电动机的运行速度与方向,实现步进电动机的角位移转为直线位移的位置测量与控制。
19.步进电动机角位移转为直线位移的位置测量与控制设计。
●参考“机电实验平台”,设计步进电动机角位移的位置测量与控制系统;
●应用myDAQ卡的DI口及AI口采集直线位移的位置信号,通过myDAQ卡的DO及AO输出口控制步进电动机速度与方向;
20.直流电动机角位移转为直线位移的位置测量与控制设计。
●参考“机电实验平台”,设计直流电动机角位移的位置测量与控制系统;
●应用DAQ卡的DI口及AI口采集直线位移的位置信号,通过DAQ卡的DO及AO输出口控制直流电动机速度与方向;
●根据位置反馈信号,来调节直流电动机的运行速度与方向,实现直流电动机的角位移转为直线位移的位置测量与控制。
21.直流电动机角位移转为直线位移的位置测量与控制设计。
●应用myDAQ卡的AI口采集直线位移的位置信号,通过myDAQ卡的AO输出口控制直流电动机速度与方向;
22.虚拟电子秤设计。
●参考“传感器与检测技术实验仪实验指导书”与“温度压力实验平台”,设计基于应变直流全桥的虚拟电子秤的系统电路;
●利用DAQMAX配置PCI-6024E卡;
●完成电子秤虚拟仪器的标定程序、测量程序设计;
●进行测量数据的低通滤波,应用编写的电子秤VI进行重量测量,记录数据并与实际值进行比较。
简要分析引起测量误差的原因;
●模拟实际电子称称小于200g的重物,并输入品名及单价,在显示器上显示品名、单价、重量及金额。
23.虚拟电子秤设计。
●应用myDAQ卡的AI口采集信号;
24.基于LabVIEW的便携式按键钢琴myDAQ(132)
●利用myDAQ的8个数字I/O通道作为琴键输入,通过LabVIEW编程合成出所需频率的声音,经过D/A变换后通过AudioOut端口放大输出。
程序过设置不同的谐波组合可以最终混合出不同乐器的音色。
25.洗衣机自动控制系统设计(135、136)
●系统控制要求:
1可以设置工作方式(洗涤或甩干)
2可以人工或自动设置洗涤水位
3自动控制洗衣机进水;
4可以人工或自动设置洗涤次数;
5自动排水;
6自动甩干;
7具有暂停/继续洗涤功能;
8具有报警功能(洗涤完毕或缺水)。
●要求用软件模拟洗衣机的自动控制过程,并要求计算机屏幕上的模拟的软控制按钮的作用与洗衣机面板上的开关、按钮作用一致。
洗衣机自动控制示意图
26大型停车场监控及收费管理系统(135、136)
某大型停车场共有300个停车位,出入控制口各2个;
按泊松分布模拟车辆到达和离开,并进行动画显示;
建立车辆收费管理系统,根据车辆类型(VIP、临时等)进行计时收费;
能根据卡号和车辆号查询车辆收费信息,若干天前或在存信息;
动态显示停车场占用情况,并提示空车位信息。
27基于myRIO的远程监控系统(135)
参考《NImyRIO入门指南》,学会使用myRIO进行图像采集。
应用myRIO的wifi模块连接电脑端进行远程通信。
将myRIO采集的图像传到电脑端实现远程监控。
扩展:
学习LabVIEW中图像处理容容,对传回的图像进行处理,实现监控报警等功能。
28基于myRIO的远程温控系统(135)
参考《NImyRIO入门指南》,学会使用myRIO,根据温度控制原理进行系统设计。
应用myRIO卡的DIO口及AIO口获取测量信号并输出控制信号。
通过wifi模块将控制系统信息(控制参数,当前温度,设定温度等,上下限报警)传回上位机PC监控
并能够进行远程参数设定和监控。
设置myRIO程序为上电自启动。
29基于LabVIEW图像处理的人脸识别(135、136)
熟悉LabVIEW的图像处理模块,根据人脸识别原理进行系统设计。
通过LabVIEW打开电脑摄像头进行图像采集,进行人脸识别。
30基于myRIO智能循迹小车的设计(135)
课题提供智能车模、两个直流电机、一个伺服舵机、两个测速编码器、myRIO处理器、电机驱动电路模块、充电电池、循迹光电电路模块等所需机械及硬件资源。
根据系统功能自主安装接线。
自主制作小车跑道。
背景为白色,跑道为黑色,可使用黑色胶带贴出或黑色油笔绘出。
编写程序使小车自主识别黑色跑道并可循环跑完若干圈。
使用PD算法是小车行驶平稳。
编写LabVIEW上位机监控程序,实时显示当前舵机角度


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 1213 虚拟仪器 课程设计 任务 doc
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《巴黎圣母院》3000字读书心得范文.docx
《巴黎圣母院》3000字读书心得范文.docx
-
《看上去很美》电影观后感5篇.docx
-
《房屋建筑学》复习题没答案.docx
-
《春》仿写作文8篇.docx
-
《关于提高农村学生小学语文中年段课外阅读能力的策略研究以古城小学为例》开题报告附课题项目申报表.docx
-
《海底两万里》读书笔记1000字精选多篇.docx
-
《三国演义》读后感1500字.docx
-
15教学4汉语教师资格等级考试.docx
-
《儿童如何学数学》读书笔记精选多篇.docx
-
《教育规划纲要》解读.docx
-
《房屋租赁合同》适用乙方模板1.docx
-
《你我他》教案.docx
-
《经济生活》练习题.docx
-
《侨联章程》.docx
-
《俗世奇人》高中读后感800字.docx
-
9A文信息安全复习题.docx
-
《选择希望人生》教案.docx
-
《创业基础》学习笔记与学习心得.docx
-
《杨氏之子》公开课教案.docx
-
13不符合项整改报告.docx
-
《节约用水珍惜水资源》综合实践活动案例.docx
-
56张从太空看地球的摄影照片.docx
-
《强制性产品认证管理办法》.docx
-
《廉颇蔺相如列传》4.docx
-
201X年安全标语大全word范文模板 17页.docx
-
《地学建模》作业.docx
-
22万亩油茶种植基地及吨年精制茶油生产线项目可行性研究报告书.docx
-
《谈生命》说课稿1.docx
-
《数字化城管系统建设导则》范文word版 12页.docx
-
72高考英语专题复习练习短文改错72.docx
-
《安全生产技术》真题 答案.docx
-
《现代通信网》阶段作业全解读.docx
-
挡土墙施工方案Microsoft Word 文档.docx
-
地下车库的防排烟设计.docx
-
道路绿化及铺装工程施工组织设计.docx
-
德育.docx
-
地铁1号线西北角站3号口改造工程施工组织设计.docx
-
地质资料信息服务集群化产业化项目.docx
-
第5章第4节案例主要软硬件选型原则和详细软硬件配置清单.docx
-
第九章流动负债习题及解析.docx
-
第四章 中央处理器教案.docx
-
第一学期某初中学校工作计划.docx
-
电力安全承诺书.docx
-
电子电路设计实验热电阻温度测量系统的设计与实现.docx
-
定语从句专析.docx
-
东莞市劳动合同范本版.docx
-
冬季施工方案铁塔组立古峰月泉110修改.docx
-
独立网店的免费商城系统选择与网络推广经验独立网店系统.docx
-
度房地产行业发展战略规划书.docx
-
顿悟中考的作文650字.docx
-
初中足球课教案全集.docx
