 控制工程基础习题答案.docx
控制工程基础习题答案.docx
- 文档编号:1506667
- 上传时间:2022-10-22
- 格式:DOCX
- 页数:65
- 大小:1.83MB
控制工程基础习题答案.docx
《控制工程基础习题答案.docx》由会员分享,可在线阅读,更多相关《控制工程基础习题答案.docx(65页珍藏版)》请在冰豆网上搜索。
控制工程基础习题答案
控制工程基础习题解答
第一章
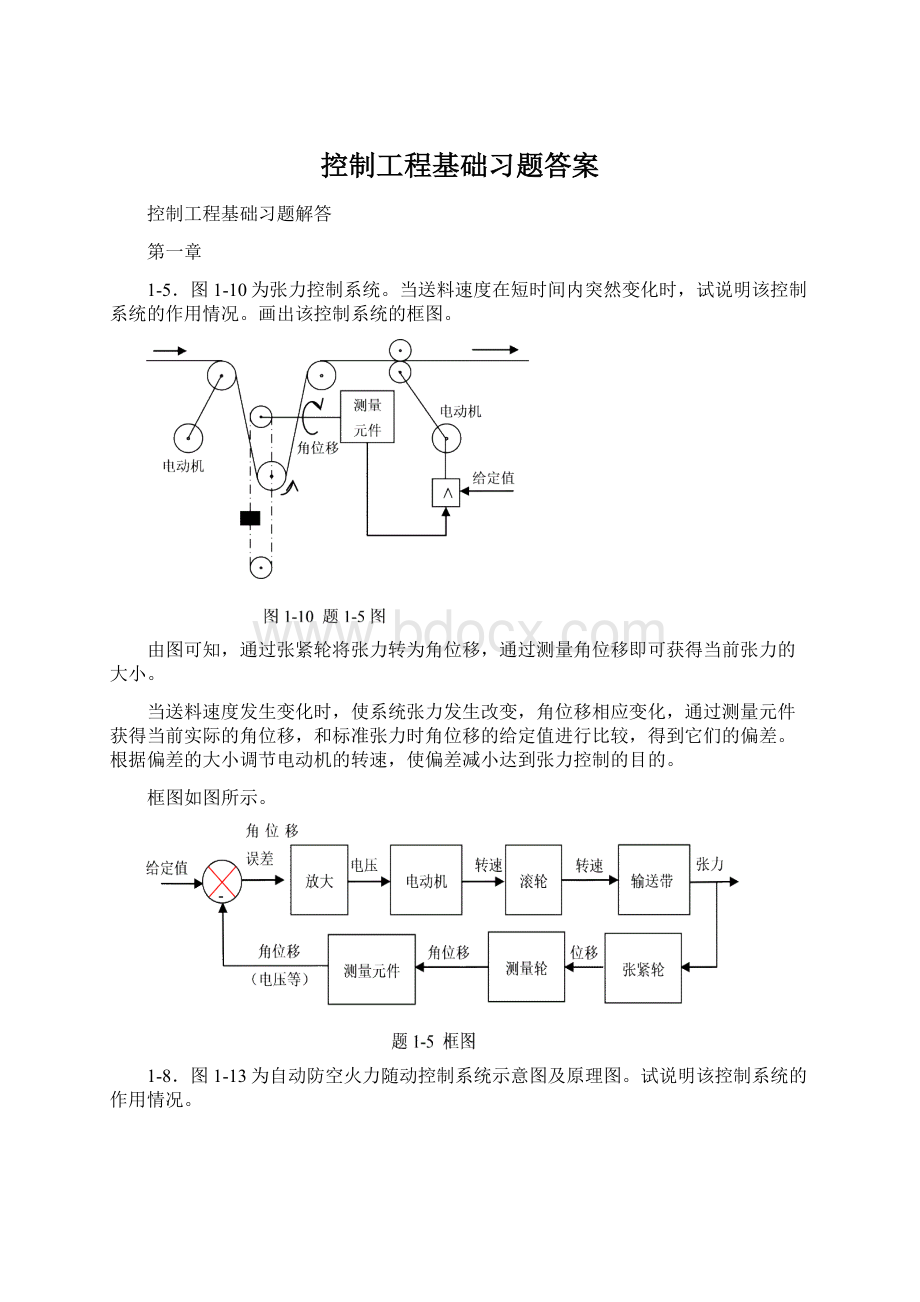
1-5.图1-10为张力控制系统。
当送料速度在短时间内突然变化时,试说明该控制系统的作用情况。
画出该控制系统的框图。
由图可知,通过张紧轮将张力转为角位移,通过测量角位移即可获得当前张力的大小。
当送料速度发生变化时,使系统张力发生改变,角位移相应变化,通过测量元件获得当前实际的角位移,和标准张力时角位移的给定值进行比较,得到它们的偏差。
根据偏差的大小调节电动机的转速,使偏差减小达到张力控制的目的。
框图如图所示。
1-8.图1-13为自动防空火力随动控制系统示意图及原理图。
试说明该控制系统的作用情况。
该系统由两个自动控制系统串联而成:
跟踪控制系统和瞄准控制系统,由跟踪控制系统获得目标的方位角和仰角,经过计算机进行弹道计算后给出火炮瞄准命令作为瞄准系统的给定值,瞄准系统控制火炮的水平旋转和垂直旋转实现瞄准。
跟踪控制系统根据敏感元件的输出获得对目标的跟踪误差,由此调整视线方向,保持敏感元件的最大输出,使视线始终对准目标,实现自动跟踪的功能。
瞄准系统分别由仰角伺服控制系统和方向角伺服控制系统并联组成,根据计算机给出的火炮瞄准命令,和仰角测量装置或水平方向角测量装置获得的火炮实际方位角比较,获得瞄准误差,通过定位伺服机构调整火炮瞄准的角度,实现火炮自动瞄准的功能。
控制工程基础习题解答
第二章
2-2.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。
(3).
解:
(5).
解:
2-6.试求下列函数的拉氏反变换。
(4).
解:
(8).
解:
2-13试求图2-28所示无源网络传递函数。
解:
b).用等效阻抗法做:
拉氏变换得:
传递函数为:
2-16试求图2-30所示有源网络传递函数。
解:
2-17.组合机车动力滑台铣平面时,当切削力Fi(t)变化时,滑台可能产生振动,从而降低被加工工件的切削表面质量。
可将动力滑台连同铣刀抽象成如图所示的质量-弹簧-阻尼系统的力学模型。
其中m为受控质量,k1,k2分别为铣刀系统,x0(t)为输出位移。
试建立数学模型。
解:
微分方程为:
拉氏变换得:
传递函数为:
2-25.试求图2-39a所示机械系统的传递函数,画出其函数框图,与图2-39b进行比较。
解1:
微分方程为:
拉氏变换得:
传递函数为:
解2:
画出框图如图所示,通过框图简化可得传递函数为:
2-28.化简图2-42所示各系统框图求传递函数。
c).
第三章
3-2.假设温度计可用1/(Ts+1)传递函数描述其特性。
现用该温度计测量某容器中的水温,发现经1min后才能指示出实际水温的96%,问:
(1).该温度计的指示从实际水温的10%变化到90%所需的时间是多少?
(2).如果给该容器加热,使容器内水温以0.1℃/s的速度均匀上升,当定义误差e(t)=r(t)-c(t)时,温度计的稳态指示误差有多大?
解:
(1).设实际水温为Tr,温度计原来处于T0=0度,当温度计放入水中时,相当于输入一阶跃值为Tr-T0=Tr的阶跃函数,温度计的时间响应函数为:
根据题意可得:
即可得:
T=18.64(s),
10%所需的时间为,。
90%所需的时间为,。
所以可得该温度计的指示从实际水温的10%变化到90%所需的时间(上升时间)是
(2).由题可知系统为一阶系统,故系统稳定,为求当r(t)=0.1t时的稳态误差,由一阶系统的时间响应分析可知,单位斜坡响应的稳态误差为T,所以稳态指示误差:
(将1/(Ts+1)转化为开环传递函数为1/(Ts)时的单位反馈系统,则可见此时系统的误差为e(t)=r(t)-c(t)。
根据系统为I型,可得稳态速度误差系数为Kv=K=1/T,得当输入信号为r(t)=0.1t时的稳态误差为
)
3-5.某控制系统如图3-24所示,已知K=125,试求:
(1).系统阶次,类型。
(2).开环传递函数,开环放大倍数。
(3).闭环传递函数,闭环零点、极点。
(4).自然振荡频率ωn,阻尼比ζ,阻尼振荡频率ωd。
(5).调整时间ts(△=2%),最大超调量σp%。
(6).输入信号r(t)=5时,系统的输出终值c(∞)、输出最大值cmax。
(7).系统的单位脉冲响应。
【系统的单位阶跃响应】
(8).系统的单位斜坡响应。
【讨论系统单位阶跃响应出现超调、衰减振荡、无超调三种情况下的K值】
(9).静态误差系数Kp、Kv、Ka。
(10).系统对输入为r(t)=5+2t+t2时的稳态误差。
解:
(1).系统的开环传递函数:
,可见系统阶次为二阶,类型为I型。
(2).开环传递函数,开环放大倍数为1.5625
(3).闭环传递函数为:
,闭环没有闭环零点,闭环极点为:
(4).,,
(5).,
(6).因为标准型二阶系统单位阶跃信号的稳态输出为1,最大值为1+Mp=1+σp%=1.015,由于线性系统符合叠加原理,所以可得:
*5=25,cmax=5*5*1.015=25.375
(7).由于标准型欠阻尼二阶系统的单位阶跃响应为:
所以系统单位阶跃响应为:
利用线性系统的重要特征即可得单位脉冲响应:
【由于标准型欠阻尼二阶系统的单位阶跃响应为:
所以系统单位阶跃响应为:
】
(8).同理可得单位斜坡响应:
积分常数C由初始状态为零的条件而得,即
可得C=-3.2,所以单位斜坡响应为:
【闭环传递函数为
可得
超调:
,得
衰减振荡:
,得
无超调:
,得,又系统稳定,所以】
(9).由于系统为I型,所以其静态误差系数分别为:
Kp=∞
Kv=1.5625
Ka=0
(10).系统对输入为r(t)=5+2t+t2时的稳态误差为:
系统是二阶系统,开环传递函数中的系数均大于零(或由闭环传递函数中可知极点的实部小于零),所以系统稳定
3-16.已知开环系统的传递函数如下(K>0),试用罗斯判据判别其闭环稳定性,并说明系统在s右半平面的根数及虚根数。
(1).
(6).
解:
(1).特征方程为
当K>0时,则第一列的符号全部大于零,所以闭环稳定,系统在s右半平面的根数及虚根数均为0。
(6).特征方程为
当K>0时,第一列有一个数小于零,所以闭环不稳定;第一列符号变化了两次,系统在s右半平面的根数为2;第一列没有等于0的数,虚根数为0。
3-19.单位反馈系统的开环传递函数为,试求:
(1).系统稳定的a值;
(2).系统所有特征根的实部均小于-1之a值。
(3).有根在(-1,0)时之a值。
解:
闭环传递函数为
(1).用罗斯判据可得:
系统稳定,则应:
,即a值应为:
(2).令,即,此时当时,则。
对闭环传递函数进行变换得:
系统稳定,则应:
,此时,。
即a值应为:
(3).由
(1)和
(2)可得,此时a应在(0,1.2)和[3,8)之间。
3-27.已知系统的结构如图3-34所示。
(1).要求系统动态性能指标σp%=16.3%,ts=1s【tp=1s】,试确定参数K1、K2的值。
(2).在上述K1、K2之值下计算系统在r(t)=t作用下的稳态误差。
解:
系统的开环传递函数为:
系统的闭环传递函数为:
(1).
得:
5%时:
得:
,则:
,由系统传递函数可知,系统稳定K1应大于零,所以
此时:
2%时:
得:
,则:
,由系统传递函数可知,系统稳定K1应大于零,所以
此时:
【
得
所以:
】
(2).系统的开环传递函数为:
系统是二阶系统,闭环(或开环)传递函数中的系数均大于零(或由闭环传递函数中可知极点的实部小于零),所以系统稳定
系统为I型
当,时
开环放大增益为:
当,时
开环放大增益为:
【,
得开环放大增益为:
】
第四章习题答案
4-2.设开环系统的零点、极点在s平面上的分布如图4-15所示,试绘制根轨迹草图。
图4-15题4-2图
解:
4-3.已知单位反馈系统的开环传递函数如下,试绘制当增益K1变化时系统的根轨迹图。
(1).
(2).
解:
(1).开环极点为
无有限开环零点。
示如图
法则2:
有三条趋向无穷的根轨迹。
法则3:
实轴上的根轨迹:
0~-2,-5~-∞。
法则4:
渐近线相角:
法则5:
渐近线交点:
,得渐近线如图示。
法则6:
分离点:
得:
,
其中为实际分离点,
分离角为:
。
如图示。
法则8:
虚轴交点:
令代入特征方程,得:
综上所述,根轨迹如图红线所示。
(2).
开环极点为
开环零点为。
示如图
法则2:
有1条趋向无穷的根轨迹。
法则3:
实轴上的根轨迹:
-2~-∞。
法则6:
分离点:
得:
,
其中为实际分离点,分离角为:
。
如图示。
法则7:
出射角:
得
法则1:
对称性可得:
综上所述,根轨迹如图红线所示。
4-9已知某单位负反馈系统的开环传递函数为
(1)系统无超调的K1值范围。
(2)确定使系统产生持续振荡的K1值,并求此时的振荡频率
(3)【判断s=-1.5+j3.12是否在根轨迹上?
若在,求另外两个根及对应的K1值。
(4)闭环极点都在σ=-1左侧的K1值范围。
】
解:
开环极点为
渐近线相角:
渐近线交点:
。
(1)分离点:
得:
,
其中为实际分离点,
此时。
分离角为:
(2)虚轴交点:
令代入特征方程,得:
画系统的根轨迹,如图示。
由根轨迹图可得:
(1)系统无超调的K1值范围为保持所有根轨迹在负实轴时(分离点之前的部分),即。
(2)确定使系统产生持续振荡的K1值为与虚轴交点时,即。
此时的振荡频率为无阻尼自然频率,即闭环极点的虚部:
。
(3)【若s=-1.5+j3.12在根轨迹上,则应满足相角条件。
即∠G(s)H(s)=±180º(2q+1).
所以满足相角条件,是在根轨迹上。
由于复数根应共轭,所以另外一个根为:
s2=-1.5-j3.12
又由于分子的阶次低于分子的阶次超过了二阶,所以闭环特征方程的根的和应等于开环极点的和。
即:
s+s2+s3=0+(-5)+(-9)=-14
得第三个根为:
s3=-14-s-s2=-11
根据幅值条件可得此时对应的K1值为:
(4)由根轨迹图可知,在-9左边的一条根轨迹的实部在整个K1的取值范围内均满足实部小于-1
在实轴[0,-5]之间存在一个最小的K1,其值为当s=-1时的值。
即:
另外在复平面上还有一个最大的K1,其闭环极点为s1,2=-1±jω,此时对应的第三个闭环极点s3=-14-s1-s2=-12
根据幅值条件可得此时对应的K1值为:
即闭环极点都在σ=-1左侧的K1值范围为:
】
4-10设单位负反馈系统的开环传递函数为
(1)试绘制根轨迹的大致图形,并对系统的稳定性进行分析。
(2)若增加一个零点z=-1,试问根轨迹图有何变化,对系统的稳定性有何影响。
解:
(1)画系统的根轨迹,如图红线所示。
其中:
渐近线相角:
渐近线交点:
。
分离点在原点处,分离角为:
。
可见系统除在K1=0时处于


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制工程 基础 习题 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 转基因粮食的危害资料摘编Word下载.docx
转基因粮食的危害资料摘编Word下载.docx
-
高中英语词组大全Word文档下载推荐.docx
-
卫计局年工作总结及新年工作计划Word格式.docx
-
贵州省煤矿安全管理人员安全资格证A考试概况Word格式.docx
-
系统集成项目招标文件Word文件下载.docx
-
消防设计技术审查的要点Word文档格式.docx
-
第三章 习题课 带电粒子在磁场或复合场中的运动Word格式.docx
-
湖南岳阳中考英语模拟卷含答案Word文档格式.docx
-
电子商务考试题总汇打印版打印打印Word下载.docx
-
选调生考试备考言语理解与表达真题Word文档格式.docx
-
高考物理实验题专练 专练15Word文档格式.docx
-
加装奥迪A4L蓝牙电话功能Word文档下载推荐.docx
-
学年下学期好教育高三月考仿真卷A卷 语文 学生版后附详解Word文档下载推荐.docx
-
净化生产车间工程一般施工技术施工方案Word文档格式.docx
-
内蒙古呼和浩特市第六中学学年高一政治下学期期末考试试题Word下载.docx
-
证券行业客户经理电话营销技巧与实例Word文档下载推荐.docx
-
叶芝 苇间风文档格式.docx
-
最新中美贸易摩擦的原因及解决对策1论文Word文件下载.docx
-
意义的近义词Word格式文档下载.docx
-
上海市中考英语试题S.docx
-
专题12观点论证类设问.docx
-
附加安心重疾条款.docx
-
设计变更管理办法修改意见稿FINAL汇编.docx
-
毕业赠言毕业致词精选多篇.docx
-
银行新员工代表发言稿精选多篇.docx
-
北京市朝阳区届高三第一学期期末语文试题Word版含答案.docx
-
HL线切割使用说明书模板.docx
-
车工实训周记.docx
-
USBHID键盘扫描码.docx
-
Apmpoqu4调研报告.docx
-
最熟悉的陌生人作文八篇.docx
-
被动语态综合讲解.docx
-
忠诚教育心得体会Word格式.docx
-
噪声控制工程课程教学大纲Word格式.docx
-
L17建筑物垂直度标高观测测量记录Word文档格式.docx
-
LNG汽车加气站工程项目投资可行性研究报告Word文档下载推荐.docx
-
Photoshop调出美女照片粉嫩甜美淡红色Word文件下载.docx
-
运用Google Earth和ArcGIS制作地方等高线地形图1215Word下载.docx
-
SQL Server 密码策略Word格式.docx
-
资产评估师《机电设备评估基础》试题及答Word下载.docx
-
增值特服ICD产品中国联通质量检查标准V50Word文档下载推荐.docx
-
最新部门年终工作个人总结范文三篇工作总结文档五篇Word文档下载推荐.docx
-
Train the TrainerWord格式文档下载.docx
-
租店铺谈判技巧Word文档下载推荐.docx
-
最新届河南省顶级名校高三押题考试二文科综合试题及答案 精品文档格式.docx
-
掌握IP地址知识 子网掩码与子网划分Word文件下载.docx
-
浙江省科学中考试题分册汇编八年级下册Word格式文档下载.docx
-
UNIT3Word格式.docx
-
最新入党积极分子思想汇报范文学习党的历程思想汇报文档五篇 2Word文档格式.docx
-
浙师大电子商务系统建设与管理习题Word文档下载推荐.docx
-
VD炉操作维护检修规程DOCWord文档下载推荐.docx
