 自控原理试题及答案AB卷热动.docx
自控原理试题及答案AB卷热动.docx
- 文档编号:1468608
- 上传时间:2022-10-22
- 格式:DOCX
- 页数:22
- 大小:531.83KB
自控原理试题及答案AB卷热动.docx
《自控原理试题及答案AB卷热动.docx》由会员分享,可在线阅读,更多相关《自控原理试题及答案AB卷热动.docx(22页珍藏版)》请在冰豆网上搜索。
自控原理试题及答案AB卷热动
中南大学考试试卷(A卷)
2008~2009学年一学期时间110分钟08年12月19日
自动控制原理课程64学时4学分考试形式:
闭卷
专业年级:
热动06总分100分,占总评成绩70%
1.简答题(每小题5分,共15分)
1)简要画出二阶系统特征根的位置与响应曲线之间的关系。
2)什么叫相位裕量?
系统的相位裕量影响系统的哪些动态指标?
3)画出计算机控制系统的方框图。
并简述它与模拟控制系统的异同。
2.求系统的传递函数或输出(共20分)
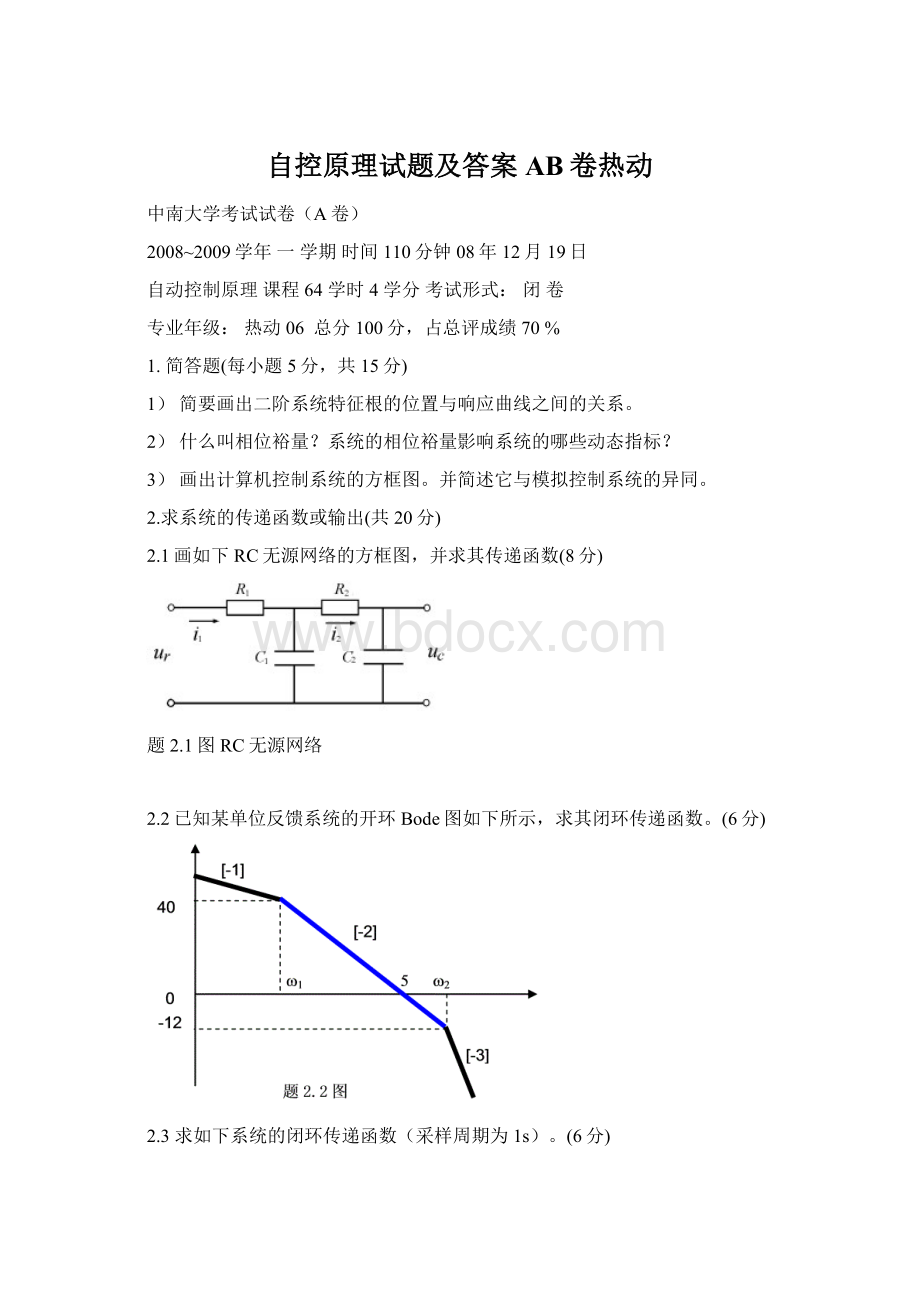
2.1画如下RC无源网络的方框图,并求其传递函数(8分)
题2.1图RC无源网络
2.2已知某单位反馈系统的开环Bode图如下所示,求其闭环传递函数。
(6分)
2.3求如下系统的闭环传递函数(采样周期为1s)。
(6分)
3.一控制系统的动态结构图如图3所示。
(1)求当σ≤20%、tS(5%)=1.8s时,系统的参数K1及值。
(2)求上述系统的位置误差系数KP、速度误差系数KV、加速度误差系数Ka及输入r(t)=1+2t时的稳态误差。
(15分)
题3图
4.某单位反馈系统其开环传递函数为,绘制系统根轨迹(12分)
5.某单位反馈系统其开环传递函数为(32分)
(1)绘制Nyquist图;并根据奈氏稳定判据求K0的稳定范围
(2)设计串联校正装置,使系统的稳态速度误差系数KV=30s-1,γ≥40,20lgKg≥10dB,ωc≥2.3rad/s。
6.图示分别为负反馈系统Nyquist图,判断系统是否稳定,如不稳定,指出不稳定根个数(共6分)
热动2004级自动控制原理试题(A卷)解题要点
2.1画如下RC无源网络的方框图,并求其传递函数(8分)
题2.1图RC无源网络
解:
用复阻抗写电路方程式:
(1)将以上四式用方框图表示,并相互连接即得RC网络结构图如下。
(4分)
(2)用梅逊公式直接由图2-6(b)写出传递函数Uc(s)/Ur(s)。
独立回路有三个:
回路相互不接触的情况只有L1和L2两个回路。
则
由上式可写出特征式为:
通向前路只有一条:
由于G1与所有回路L1,L2,L3都有公共支路,属于相互有接触,则余子式Δ1=1
代入梅逊公式得传递函数
(8分)
2.3已知某单位反馈系统的开环Bode图如下所示,求其闭环传递函数。
解:
由图可得:
(2分)
L(5)=40-40lg5/ω1=0ω1=0.5T1=2(3分)
L(ω1)=L(0.5)=20lgK/ω1=40K=50(4分)
L(ω2)=-40lgω2/5=-12ω2=10T2=0.1(5分)
(6分)
2.4求如下系统的闭环传递函数(采样周期为1s)。
解:
【1分】
【2分】
【3分】
【4分】
其闭环脉冲传递函数为
【6分】
3.一控制系统的动态结构图如图3所示。
(1)求当σ≤20%、tS(5%)=1.8s时,系统的参数K1及值。
(2)求上述系统的位置误差系数KP、速度误差系数KV、加速度误差系数Ka及输入r(t)=1+2t时的稳态误差。
(15分)
题3图
解
(1)系统开环传递函数为
【3分】
与标准型相对比,得
【4分】
由,得
【6分】
由,得
所以K1=13.1【8分】
【10分】
(2)系统的稳态误差系数分别为:
【13分】
输入为r(t)=1+2t时的稳态误差为【15分】
4.设一单位反馈系统其开环传递函数为,
(1)试画出其根轨迹图,求K0的稳定范围。
(12分)
解
①系统有三个开环极点,没有开环零点,故根轨迹有三个分支,对称于实轴并全部终止于无穷远零点,有3条渐近线。
【1分】
②根轨迹渐近线与实轴交点为
根轨迹渐近线与实轴交角为
【3分】
③在实轴上的(-∞,-10]、[-5,0]区间存在根轨迹【4分】
④显然,根轨迹在[-5,0]区间有分离,由可得:
3S2+110S+250=0,其解为S1=-7.88,S2=-2.11
经验证S2为分离点。
【6分】
⑤将代入特征方程式S3+15S2+50S+K=0得
K-15ω2+j(50ω-ω3)=0
解方程得为根轨迹起点,故根轨迹与虚轴交点为,此时K=750,即K0=15,故稳定范围为0 ⑥故此得到系统的根轨迹如下: 【12分】 5.设一单位反馈系统其开环传递函数为, (1)绘制其Nyquist图,求K0的稳定范围; (2)设计串联校正装置,使系统的稳态速度误差系数KV=30s-1,γ≥40,20lgKg≥10dB,ωc≥2.3rad/s。 (44分) 解: (1)绘制Nyquist图, 【4分】 ϕ(0)=-90,ϕ(+∞)=-270,且ϕ(0+)<-90,所以Nyquist图从负虚轴的左边开始顺时针转动,最后终止于原点,如图所示。 【10分】 开环幅相曲线与负实轴相交,交点坐标如下: 故交点处频率ωg满足方程ωg-0.02ωg3=0,即【13分】 交点处幅值为,由奈氏稳定判据可知当时系统稳定,即系统稳定范围为K0<15。 【16分】 (3)系统设计 ①、由KV=30可得K0=30,据此绘制原系统的Bode图如下。 【3分】 由图可得校正前系统的性能指标为: 【6分】 显然相位裕量不满足要求。 ②如采用超前校正。 那么ϕcm=40+25+5>65,此时系统相角在ωc附近变化剧烈,且校正后ωc将会大于12,故本例不能采用超前校正。 考虑到,本例题对系统截止频率值要求不大(ωc≥2.3),故选用串联滞后校正,通过降低截止频率ωc来满足需要的性能指标。 【7分】 ③根据要求的相角裕量确定截止频率ωc: ϕo(ωc)=γ-ϕc(ωc)-180=40-(-6)-180=-134o 由图得ωc≤2.8,故根据题意可取ωc=2.7。 【9分】 【或根据ϕo(ωc)=-134o算出ωc=2.8】 ④确定滞后校正装置传函: 先根据L0(ωc)+20lgb=0求出b值,然后取ω2=1/bT=0.1ωc求出bT、T,最后得到校正装置的传递函数GC(s): 【13分】 ⑤校正后系统的Bode图如下图所示,由该图可知,校正后系统的ωc=2.7,相位裕量γ约为41o,已满足设计要求。 【16分】 5.1已知系统特征方程2s5+s4+6s3+3s2+s+1=0。 (4分) 解: 列出routh表: s5261 s4131 s30()-1 s2(3+1)/1 s1-1-2/(3+1) s01 第一列元素中符号改变两次,故系统不稳定,有两个不稳定根。 【4分】 5.2图示分别为负反馈系统Nyquist图。 (6分) 解: a)由图可见,ω: 0+∞范围内Nyquist图不包围(-1,j0)点,故Z=p+2N=0,故系统稳定。 【2分】 b)由图可见,ω: 0+∞范围内Nyquist图顺时针包围(-1,j0)点一次,故Z=p+2N=2,故系统不稳定,有两个不稳定根。 【2分】 c)由图可见,ω: 0+∞范围内Nyquist图逆时针包围(-1,j0)点1/2次,故Z=p+2N=1-2*1/2=0,故系统稳定。 【2分】 中南大学考试试卷(B卷) 2008~2009学年一学期时间110分钟08年12月19日 自动控制原理课程64学时4学分考试形式: 闭卷 专业年级: 热动06级总分100分,占总评成绩70% 一、简答题(20分) 1、(6分)闭环自动控制系统是由哪些环节组成的,各环节在系统中起什么作用? 2、(8分)比较串联超前校正和串联滞后校正的校正功能和校正原理。 3、(6分)自动控制系统的性能指标有哪些? 简单说明之。 二、(每小题5分,共10分)求下图所示各系统的传递函数。 1、求G(s)=Xc(s)/Xr(s)。 2、求G(s)=Uc(s)/Ur(s)。 图2-1 图2-2 三、(15分)一控制系统的动态结构图如图3所示。 1、求超调量σ=16.3%、调节时间tS(5%)=1.65s时,系统的参数K及值; 2、求上述系统的位置误差系数KP、速度误差系数KV、加速度误差系数Ka及输入r(t)=1+2t时的稳态误差。 图3 四、(15分)设一单位反馈系统其开环传递函数为,画出其根轨迹图,求K0的稳定范围。 五、(13分)判断系统是否稳定,如不稳定,指出不稳定根个数 1、已知系统特征方程2s5+s4+6s3+3s2+s+1=0。 (4分) 2、图示分别为负反馈系统的零极点图、Nyquist图。 (9分) c)nyquist图,不稳定开环极点数P=2,I型系统 六、(20分)已知最小相位系统开环对数幅频特性如图6: (1)写出其传递函数; (2)绘出近似的nyquist图; (3)求其相位裕量及增益裕量。 图6 七、(7分)求图7所示采样系统的开环脉冲函数和闭环脉冲传递函数,其中采样周期T=1秒。 (注: ) 图7 中南大学考试试卷参考答案(B卷) 2008~2009学年一学期时间110分钟08年12月19日 自动控制原理课程64学时4学分考试形式: 闭卷 一、简答题(20分) (略) 二、(每小题5分,共10分)求下图所示各系统的传递函数。 1、 图2-1 图2-2 2、画出其等效信号流图,如下所示 前向通道: 三个回路: 流图特征式: 无不相交回路,P1与所有回路相交,故: 三、(15分)一控制系统的动态结构图如图3所示。 1、求当σ=16.3%、tS(5%)=1.65s时,系统的参数K及值; 2、求上述系统的位置误差系数KP、速度误差系数KV、加速度误差系数Ka及输入r(t)=1+2t时的稳态误差。 图3 解1、系统开环传递函数为 【3分】 与标准型相对比,得 【4分】 由,得 【6分】 由,得 所以: 【8分】 【10分】 (2)开环传递函数: 系统的稳态误差系数分别为: 【13分】 输入为r(t)=1+2t时的稳态误差为【15分】 四、(15分)设一单位反馈系统其开环传递函数为,画出其根轨迹图,求K0的稳定范围。 解: (1)根轨迹图绘制, ①系统有三个开环极点,没有开环零点,故根轨迹有三个分支,对称于实轴并全部终止于无穷远零点,有3条渐近线。 【2分】 ②根轨迹渐近线与实轴交点为 根轨迹渐近线与实轴交角为 【4分】 ③在实轴上的(-∞,-10]、[-5,0]区间存在根轨迹【6分】 ④显然,根轨迹在[-5,0]区间有分离,由可得: 3S2+110S+250=0,其解为S1=-7.88,S2=-2.11 经验证S2为分离点。 【8分】 ⑤将代入特征方程式S3+15S2+50S+K=0得 K-15ω2+j(50ω


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自控 原理 试题 答案 AB 卷热动
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《雷雨》中的蘩漪人物形象分析 1.docx
《雷雨》中的蘩漪人物形象分析 1.docx
-
《经济法基础》第三章章节练习与答案解析.docx
-
安徽省合肥市包河区卫生健康系统招聘试题及答案解析.docx
-
《河中石兽》复习过程.docx
-
版二级建造师《公路工程管理与实务》考前检测 附答案.docx
-
保密安全制度监理组5篇修改版.docx
-
北师大版届九年级上学期期末考试英语试题I卷.docx
-
PACE产品及周期优化法系统结构复习课程.docx
-
常规变电站常规设计.docx
-
初三欧姆定律计算题题型整理.docx
-
《测绘管理与法律法规》模拟试题一附答案.docx
-
2测风工岗位练兵技术比武.docx
-
《小学语文不同课型的教学模式参考》1.docx
-
15高考宁夏英语及答案教学内容.docx
-
ABS圆形笔筒课程设计说明书.docx
-
c语言程序填空题.docx
-
茶艺师高级三级教学计划大纲.docx
-
场平土石方工程施工项目组织设计.docx
-
《人力资源管理》期末试题及答案教学内容.docx
-
《河南省高等学校教师实验人员中高级专业技术职务任职资格申报评审条件试行.docx
-
01钢结构制作施工工艺标准文档.docx
-
IIR数字滤波器的设计流程图.docx
-
005纺丝作业指导书.docx
-
1991高考化学试题.docx
-
GMP审核检查表与审核员指南.docx
-
成本会计试题二.docx
-
14001讲师心态调整培训讲座讲义体验版共14页文档.docx
-
cpld矩阵键盘.docx
-
《金融服务营销》.docx
-
NHR100过程校验仪140408.docx
-
Q+ Web 改版设计小结.docx
-
八年级上册古诗词鉴赏含参考答案.docx
-
61零售企业新标准.docx
-
大学生村官工作调研报告.docx
-
社会调研研究方法.docx
-
《河北省防雷工程专业技术人员从业资格考试大纲》.docx
-
成都市七年级数学上册期末试题有解析新人教版.docx
-
用工协议书模板7篇.docx
-
常用材料及构件自重.docx
-
各种流量计优缺点.docx
-
春人教版小学数学一年级下册全册教案及教学计划.docx
-
医疗器械制度和职责.docx
-
第3章交通量.docx
-
初中三年100组常考英语词组.docx
-
尔雅通识课《社会心理学》第十三章社会心理学的应用答案.docx
-
封装Ethernet帧课程设计.docx
-
关于画水果说课稿.docx
-
加快工商行政管理职能转型开创西部领先全国一流重庆工商新精.docx
-
车站计算机联锁论文.docx
-
师德师风专题教育活动心得体会六篇.docx
-
广告学概论复习资料.docx
