 YAMAHA基准坐标设定docx文档格式.docx
YAMAHA基准坐标设定docx文档格式.docx
- 文档编号:14629273
- 上传时间:2022-10-23
- 格式:DOCX
- 页数:42
- 大小:1.11MB
YAMAHA基准坐标设定docx文档格式.docx
《YAMAHA基准坐标设定docx文档格式.docx》由会员分享,可在线阅读,更多相关《YAMAHA基准坐标设定docx文档格式.docx(42页珍藏版)》请在冰豆网上搜索。
2)三点设定方法
3)简单设定方法
2、为了达到比较好的效果推荐使用四点设定方法
3、带手编时请参照如下说明来进行基准坐标设定
11.9基准坐标的设定
所谓基准坐标是在SCARA型机器人上.以X轴的廡转中心为坐标原点的正究坐标乘。
使用SCARA型机器人时.根据星准坐标的设定.以下的操作及机能有效。
1.可以使机器人手笔時的前端呈正交移动。
2.可以使用Pallet定义/Shitt定义/Hand定义。
3.可以使用直线/圆弧插补移动、Pallet移动命令等的坐标交按必叢的命令。
关于基准坐标的设定卜有以下3种方法©
E4个坐标点示教万法
以输入示教长方形的4个坐标点及以尿初示敎的坐标点为原点的相对位董留下的3个坐标点来设定埜准坐标的方注a
2.3个坐标点示教方法
以示教臣线上的3个坐^^(3点间烏相等)段:
从起跆点到终点的方向以及输入长度采设定呈准坐标的万法。
3.简羊设定万法
为便SCARA型机器人的XY手睜移动到一条直线上.井输入X*轴的长度来设定基准坐标的方法。
图4-11-9^基准坐标的设定
设定基准坐标时.以下的参数将自动被设定口
L「Armlength(mnn)」
设定基准坐标
时以下二参数
回发生变化
##X铀習长(X轴与¥
轴的迤转中心距离》
M2-亦.杓Y轻腎长(Y轴与R紬的旋莪中心距离、或着Y轴的旋转中心与作业点的距离)
2..rOffsetpulsej
M1=删朋制X轴Offsetpuhe{机器人匱点位置(0,脉肿莅置)的区铀与基准坐歸平曲的X抽羽威的夹角吊屋}
M2.#»
#*»
»
V轴Offsetpulse(:
机器人.原点位童.(0脉冲位置)的X轴与〒轴形成的央角和度)
M4=R辘Offsetpulse(机器人掠点位置(0脉沖位置)的R轴方向与基准坐标平向的只轴老成的夬作吊度》
设定Z台机寒人时.副机器人也样、
1.「Armlength(mm)J
si=itatt.a»
x轴皆长(x轴与丫紹的腹转中心的距离》
S2=.##Y轴罟长(〒轴与R韜的旋转中心的隧离、或者¥
轴的養转中心与作业点的距离》
2.fOffsetpulsej
S1=艸朋制X轴Offsetpuh&
{机器人原点位置(0锯肿位覽)的X轴与基准坐标平面的X抽世戍的夬饰角度》
S2=丫轴O和mpulss(机器人原点位置(0脉冲位置)的X轴与丫轴形成的夹吊角度)
S4=R轴Oft&
fitpulse(机器人原点位置CO眛沖位盘)的R轴方向与基准坐标平曲的X轴形戍的夹角吊度)
但是,R轴Offset不被设定Q请在rSYSTEM>
PARAM>
AXISj模式下设定。
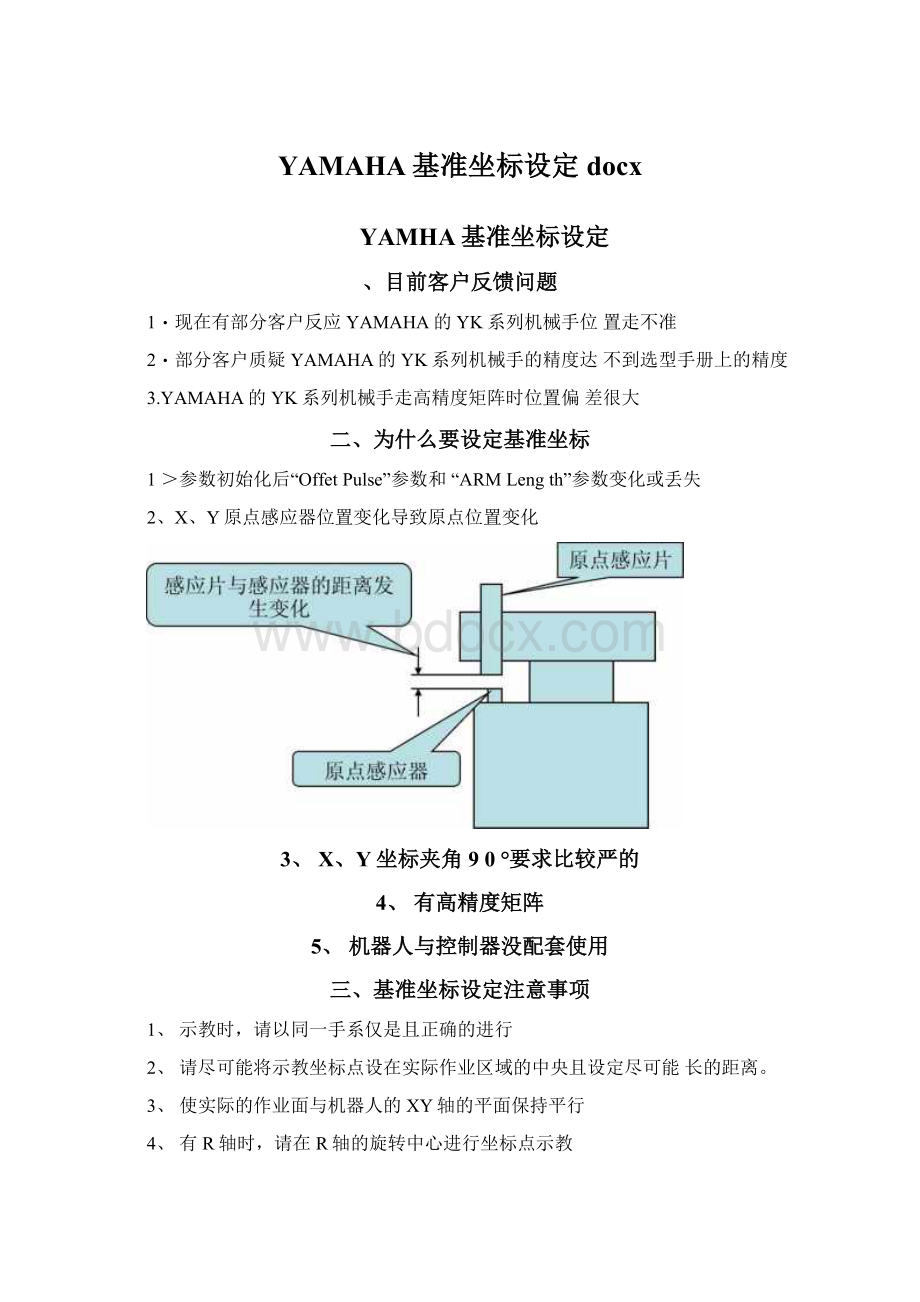
设定基准坐标时,靖注意以下注意事项。
1•示敎旳.请以同一手型(系)谨慎且正碗的进行©
2一请尽可能将示教坐标点设定在实际的作业区域的中央薛且设定尽可能长的眨懿
3.使实陥的作业面与机希人的XY轴作的平面保捕平行。
设怎注意事
4•有R轴时.谱在R轴的旋转中心进行坐林点示教空
5.基准坐赫设定值很大程度上影咆了正交坐标藉度,
图4-11-100基准坐标的设定
X的Ofhsel:
xjfoe
R幻GfhitL:
xJae
654I7-K7-OO
1)四点设定方法
「MANUAL>
COORDlJ模式下有效键与子菜单的内容.如下所示。
有敕键
華单
F1
4.POINTS
H屯个坐标点示敎方法识定1S准坐掾9
F2
3POINTS
U3个坐标点示教方法设定曲准坐标.
F3
SliMFLE
以简绘设定方法设定越准空标*
11-9J根据4个坐标点示教方法设定基准坐标
图4-11.102根据4个坐标点示教方法设定基准生拯
前提:
以P[1]为原点时的坐标信时.必须明确坐标OP[2Lp[3LPWo
要点
1.请林各示義坚粽点设定在可燈范IS内叢史的建處“
2.-边在50mm叹下时\可能无法设丸“
Step
rMANUAL>
COORDlJ模式下•按[F1]键(4P0INTS).根据4个坐标点示教进入垦准坐标的设定模式』
664JCUK7-CO
站pZ使用Jog犍(手动),将机器人前端移至示教坐标点P[1],并按呼决蚩亍
swp3在示教坐林点p⑵上执1^81602的操作。
厂说用JOG点动移动到
、P1号点后按下回车键'
使用JOG点动移动到
、P2号点后按下回车键一
以PCI]为原点时的示数坐标点PC2]的坐标収mm单位输入。
图4-11^104根抵4个坐标点示教方法设定基准坐皈
MANUA
x
MovearmtoPC
PE2]-100■0
PC3]-
PE4]-
EPOS]
>
C00RDI>
4P0IN
将光标移动到P2位
置,输入以P1为原
点时P2的坐标
0%[MGJ匸JJ
-zr
andpressENTERkey
•00
St^pS至貝S2p3、Step4的操作.決定示敎坐标点门[3]与P[4.]o
重复第三步和第四步
设定P3、P4
swpG普长与Offsetpulse值的确认信总在Guidelins上显示。
保存设定内容时.按[F4]^!
(YES)c不保存设定内容时.按[F引铠(NO)。
I图4-11-105根据4个坐标点示教方法设定基准坐标
无法计算时.显示错误信息。
设定完成后会根据提
示保存设定参数
COORDI>
4POINTS50%匚MGJCJ3
xyzr
Arm1eng"
th匸mmJ
Ml-199.96M2-199.98
Offsetpulse
Ml--12421M2-2001
MANUAL
SetOK?
YES
NO
664J2-K7-00
2)三点设法
11.9.2根据3个坐标点示教方法设定基准坐标
图4-1M06根据3个坐标点示我方法设定基准坐标
前提:
P[1]sPL2]%
P[2]为P[1]-P[3]的中点g
姜点
示老;
坐薛点5能范国内衆丸的砸离.
Step!
rMANUALaCOOROI」揆式T.[F2j<
3POINTS),根据3个坐标点示教进入基;
隹坐标的设定棧式°
图4-11-107根堀3个坐标点示教方法设定基准坐标
664J5-K7-00
在示教坐極点*[刃、PC3J上也执行"
的漫作&
重复步骤2
归口4根CF1](+X〉〜併4](-Y〉键决定从PC13〜P[3]的方向。
图4-11109抿扌居3个坐标点示教方法设定基准坐标
选择直线方向,如果从P1至UP3在X(或Y)方向并且从P1到P3为X(或Y)递增则选+X(+Y),递减则选・X(-Y)
50%匚MG1C
PUSH
Press.F・keytogetDirect:
1on
MANUAL百』述“鼻盘瓯走
匚POS1-
■9654
4©
567
+x
-X
+Y
便用[0]〜[9]、[•]悄输入P[1]
PL3]的长屋幷按@进°
(输入值在1000ClTo)
图4-11-110根拒3个坐标点示教方法设定基准坐标
输入P[1]到
P[3]的长度
COORDI>
3P0INTS50%匚MG3LJ3
Seiec七1$七P.七o3r)clP.«
ge•七DPreu"
tTon
十r>
+X
PCI]PC3]
◎中
En-terthe1engthofPC13・1=>
匸31]匸mm:
]
匚丄-1OOO]Eri七电广>
_
664J7-K17-00
金即6胃长与Of仙tpul鋪值的8IVJ1息在GuidHirw上显示。
无澈十算01显示鶴信息Q保昶定内容陆按[F4]毬(YES)。
不保昶定内酣,根[F5]毬(NO)。
根据提示保存
设定参数
3POINTS50%[MG][J]
Armlengthfmm]
Hl-199.96MA199.98
Offsetpulse
Hl--12421M2-2001
3)简单设定法
11.9.3根据简单设定方法设定基准坐标
图4-11112根扌居简笙设定方法设定基准坐标
654J9-K7-CI0
使X臂与Y骨以及R柚的起梓屮心冬可維虚问一直战上.
StGp1rMANUAL>
COORDlJ揆式下•按[F5](SIMPLE).根据简单坐标设定进入基准坐标设定摸式。
图4-11-115根抵简蛍设定方法设定基准坐标
SIMPLE
xyz——
P1easeMoveX&
Yarms£
七rwfgh七
beforepressEnt-erkey.
XArmYArm
LPOSJ
0-
24-349
―[—>
+x
-丄029
VEL+
50%EMG]C
进入冏单设
定画面
VEL-
664.KO-K7.aO
s如丄便用Jog§
?
(手动)•或用手(伺服呈关闭状态)移动机器人手背便X、¥
滋在同一直线上,并按金热此时.
•f
设置的+X轴方向如图4-1M12所示。
號叩3输入X臂的长度并按
图4」1-114根拥简单设定方法设定基准坐标
输入X的臂
长并按回车
SIMPLE50%[MG1CJ]
XyZr
Ent^rth亡1engthofXArm[mm]
I:
丄■丄000]Enter>
225.00
通过手动方法使X、
丫在同一直线上并
按回车
664K1-K7-00
664K2-K.7-O3
根据提示保
存设肚参数
y
StepS彗长与CH+xtpulse德的确认信电在Guideline上显示。
保存设定内容时.按[F4](YES)o不保存设定内穹时.按[F


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- YAMAHA 基准 坐标 设定 docx
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 (完整word版)信息论与编码期末考试题----学生复习用.doc
(完整word版)信息论与编码期末考试题----学生复习用.doc
-
(完整)六年级上册几何图形题.docx
-
(完整)储罐防腐施工方案.doc
-
(完整word版)公务员录用体检表.doc
-
(完整)八年级上册几何证明题专项练习.doc
-
(决策管理)投资决策委员会实施细则.doc
-
(完整)四年级上册口算、竖式计算、脱式计算.doc
-
(压轴题)初中物理八年级上册第一章《机械运动》检测(含答案解析)(2).doc
-
(完整)小学三年级心理健康教案.doc
-
(完整)初中文言文翻译技巧.doc
-
(名师整理)语文中考《骆驼祥子》名著导读优秀教案.docx
-
(完整word版)偏旁部首名称大全.doc
-
(人教PEP)五年级英语竞赛试题及答案.doc
-
(完整)山东省普通高中学生综合素质评价信息管理系统操作手册学生用户手册.doc
-
(完整word版)体育课教案模板.doc
-
(住宅楼方案)房屋建筑学课程设计说明书.doc
-
(完整word版)《分数的意义》优秀教学设计(公开课).doc
-
(完整word版)安全生产标准化实施方案.doc
-
(完整)初中生人物形象分析常用词汇.doc
-
(完整版)借用公司资质协议.doc
-
(完整word版)仙剑奇侠传三图文攻略(最详细版).doc
-
(完整word版)历年陕西省专升本英语真题(答案解析超全).doc
-
(完整)四年级四则混合运算训练题100道.doc
-
(完整word版)学校团总支部换届选举方案.doc
-
(完整word版)安全标准化绩效评定计划.doc
-
(完整)分布式光伏发电项目施工组织设计.doc
-
(完整版)埋地塑料管结构环刚度计算.doc
-
(完整版)国家农业产业强镇示范建设实施方案.doc
-
(完整版)八年级数学上几何典型试题及答案.doc
-
(完整版)六年级音乐下册人音版理论知识梳理.doc
-
(完整版)囚徒健身图文教程和计划表(完美打印版).doc
 (完整版)固定资产盘点表.xls
(完整版)固定资产盘点表.xls
-
高考真题语文全国卷Ⅱ含答案Word文档下载推荐.docx
-
高考政治一轮复习专题16我国的人民代表大会制度押题专练Word格式文档下载.docx
-
顶管工程施工组织设计Word下载.docx
-
教育学习文章一只小鸟 教学设计Word格式.docx
-
东财《成本会计X》综合作业Word文档下载推荐.docx
-
建筑监理评估二类高层建筑楼竣工验收质量评估报告Word文档格式.docx
-
罕见明代顶级佛画《天龙八部》不输画圣吴道子Word下载.docx
-
胶卷投资项目商业计划书Word文档格式.docx
-
护士职业资格证《专业实务》综合练习试题C卷 含答案Word文件下载.docx
-
健身房聘用合同Word格式.docx
-
会计实务为逃税签阴阳合同留祸根被稽查受补税罚款双担责Word文件下载.docx
-
高三历史教案 文艺复兴宗教改革与启蒙运动教案Word文档格式.docx
-
和平版小学综合实践活动六年级上册教案 全册Word文件下载.docx
-
江苏高考英语二轮培优新方案课件背熟热点话题考前10天第2天晨背热点话题二教育与学习文档格式.docx
-
儿童组第一阶段广州乒乓球协会Word下载.docx
-
二年级第一学期数学知识点归纳整理文档格式.docx
-
技术标一外墙保温系统文档格式.docx
-
二年级数学上册9的乘法口诀教学反思Word下载.docx
-
基于遗传算法的流水车间调度问题精品毕业设计完整版Word文档格式.docx
