 自动控制原理复习题2本部Word下载.docx
自动控制原理复习题2本部Word下载.docx
- 文档编号:14224275
- 上传时间:2022-10-20
- 格式:DOCX
- 页数:17
- 大小:344.78KB
自动控制原理复习题2本部Word下载.docx
《自动控制原理复习题2本部Word下载.docx》由会员分享,可在线阅读,更多相关《自动控制原理复习题2本部Word下载.docx(17页珍藏版)》请在冰豆网上搜索。
静态U=0
动态U0
工件增多(负载增大)
(负载减小)
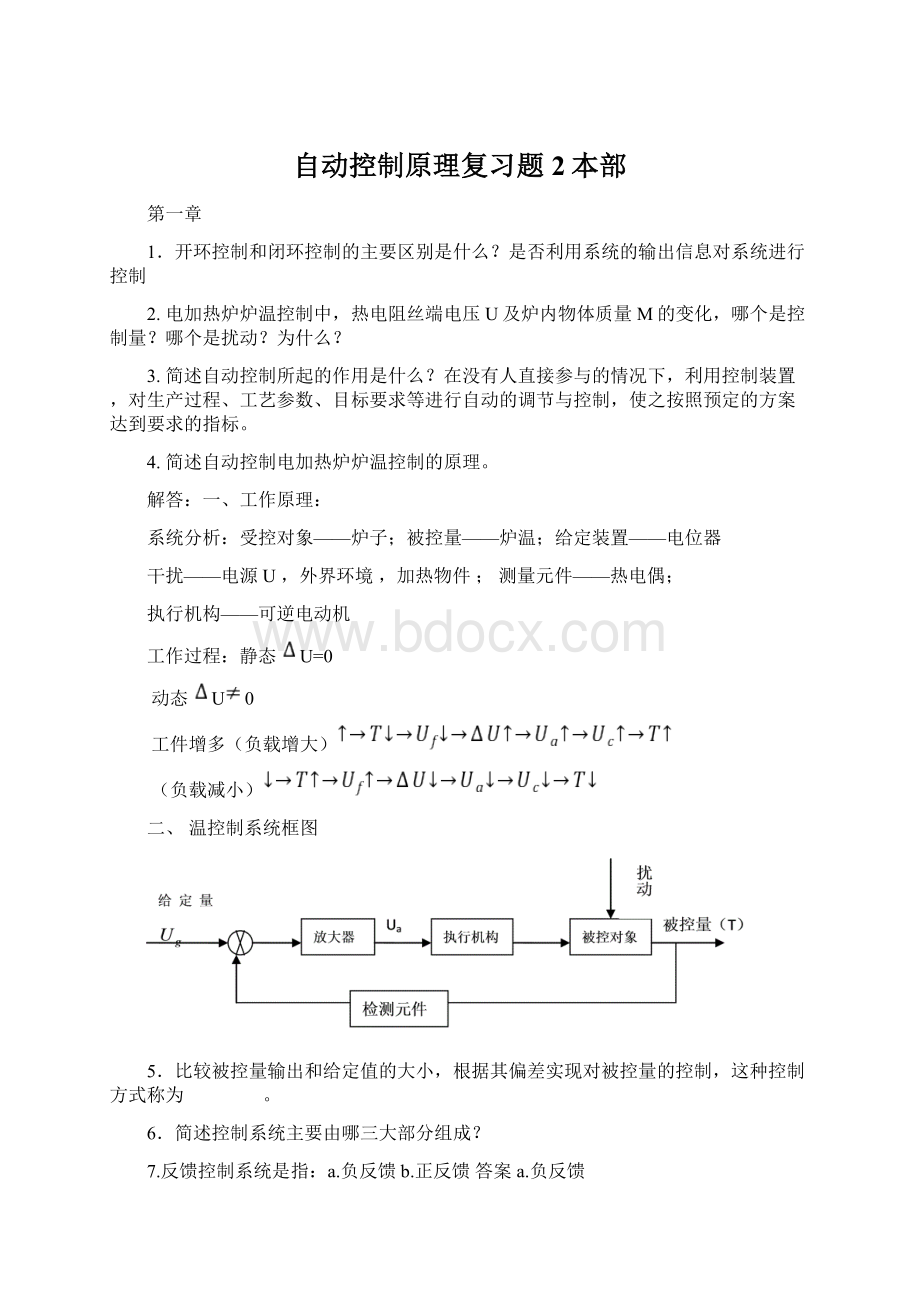
二、温控制系统框图
5.比较被控量输出和给定值的大小,根据其偏差实现对被控量的控制,这种控制方式称为 。
6.简述控制系统主要由哪三大部分组成?
7.反馈控制系统是指:
a.负反馈b.正反馈答案a.负反馈
8.反馈控制系统的特点是:
答案控制精度高、结构复杂
9.开环控制的特点是:
答案控制精度低、结构简单
10.闭环控制系统的基本环节有:
给定、比较、控制、对象、反馈
11.自控系统各环节的输出量分别为:
给定量、反馈量、偏差、控制量输出量。
第二章
1.自控系统的数学模型主要有以下三种:
微分方程、传递函数、频率特性
2.实际的物理系统都是:
a.非线性的b.线性的a.非线性的
3.传递函数等于输出像函数比输入像函数。
4.传递函数只与系统结构参数有关,与输出量、输入量无关。
5.惯性环节的惯性时间常数越大,系统快速性越差。
6.由laplace变换的微分定理,。
7.如图质量、弹簧、摩擦系统,k和r分别为弹簧系数和摩擦系数,u(t)为外力,试写出系统的传递函数表示。
8.机电控制系统中电压u(t),转速(t)分别为输入、输出量,各部分运动关系的laplace变换为:
式中为力矩,为感应电动势,为感应电流,J、f、L、R、b、d为非零常数,试画出总的系统方框图。
9.试列举二种子系统常用的连结方式,并画出示意图。
10.复杂方框图简化应注意哪些原则(至少列出四项)
11.将环节的输出信号作为环节的输入信号,则总的系统传递函数为。
12.二个环节和有相同输入,总的系统输出为二个环节输出的代数和,则总的系统传递函数为。
13.已知系统信号流图如左,试画出它的传递函数方框图。
14.线性系统的齐次性和叠加性是指什么?
15.线性系统的特点是信号具有性和性。
16.信号流图中,进入节点的信号有二个流出分支,则每个支路信号的大小是原信号的
。
17.什么是定常系统?
18.求下列微分方程的Laplace变换:
;
19.已知系统方框图如左,写出从U(s)到Y(s)的传递函数。
20.凡是具有叠加性和齐次性的系统称为。
21.已知系统框图如左,试画出它的信号流图。
22.传递函数阶次为n的分母多次式的根被称为系统的,共有个。
23.系统数学建模的主要步骤有哪四步?
24.如图L-R-C电路,输入电压为u(t),输出量为电容二端电压uc(t),试确定其传递函数uc(s)/u(s)。
25.什么是传递函数的零点,极点和传递系数?
26.最小相位系统是指系统的开环传递函数的零点和极点。
27求系统传递函数。
1.求电路网络传递函数
G(S)=1/(LCS*S+RCS+1)G(S)=LCS*S/(LCS*S+RCS+1)
G(S)=RCS/(LCS*S+RCS+1)G(S)=β(R1CS+1)/(CR1Sβ+1)
β=R2/(R1+R2)
-R2/[R1(R1CS+1)]-1/(R1CS)
28.化简方框图,求传递函数
29.实验测得系统幅频渐近线如下图,求对应的传递函数。
30.求采样系统的脉冲传递函数。
第三章时域分析
1.二阶系统阻尼系数>1,系统就不会出现过调。
2.最佳阻尼系数ξ=0.707。
3.小时间迟后环节可近似为惯性环节。
4.分析某一时间的误差可用:
a.终值定理b.拉氏反变换。
5.高阶系统暂态性能取决于离虚轴最近的闭环极点。
6.主导极点应满足:
a.离虚轴最近b.5倍距离内无其他零极点。
7.线性系统稳定,其闭环极点均应在〔S〕平面的左平面。
8.以G0(s)为开环的单位负反馈系统的误差传函Φ(S)=1/{1+G0(S)}
9.斯阵列表第一列中某项为零,其他各项均大于零,说明什么?
临界稳定
10设系统开环传递函数为,若要求单位负反馈系统的阶跃响应有16%的超调,则k应取何值?
(K=16)
11试简述二阶系统中,阻尼比对阶跃响应的影响。
阻尼比超小,超调量越大,调节时间增大。
12.已知系统结构如图,试确定使闭环稳定的开环增益k的范围。
解:
闭环特征方程为:
,得0〈K〈14/9
13.二阶闭环系统传递函数标准型为,其中称为系统的,
为。
14.二阶系统闭环标准形式为,试画出阻尼比为和二种情况下阶跃响应的示意图。
用什么名称称呼这二种情况?
15.二阶系统,输入信号为单位阶跃函数时,求输出信号的峰值时间和超调量.(0.79,9.5%)
16.说明Ⅰ型系统在单位阶跃作用下的稳态误差为0。
17.已知开环传递函数为,求其单位负反馈系统阶跃响应的超调量和调节时间。
(16.3%,1.5s)
18.简述什么是稳定平衡点,什么是不稳定平衡点?
19.已知系统特征方程为,用劳斯判据判别系统的稳定性。
20.单位反馈系统的闭环传递函数为在单位阶跃作用下的误差响应为,求系统的阻尼比和自然频率。
()
21.已知单位负反馈系统的开环传递函数为
1)判断使闭环系统稳定的k值范围
2)要使系统的阻尼比为,求相应的k值和这时的自然频率
3)求以上参数时闭环阶跃响应C(t)
22.系统的开环传递函数为,和分别为m阶和n阶多项式,试说明什么是O型系统,Ⅰ型系统,Ⅱ型系统?
23.系统结构图如下所示,已知的单位阶跃响应为
1)求()
2)当改为1/s+2,且时,求系统的稳态输出值()
3)指出系统输出动态响应的类型(过阻尼,欠阻尼,临界阻尼,无阻尼)
24.衰减振荡过程中,调节时间和是二个最常用的瞬态指标。
25.二阶系统,输入信号为单位阶跃函数时,求输出信号的峰值时间和超调量
26.如图位置随动系统,当为单位阶跃时,求输出的静态位置误差。
(0)
27.如图位置随动系统,当r(t)=t时,求c(t)的静态位置误差。
(1)
28.已知系统开环传递函数为P(s)=2/s(s+2),
1)试求在单位负反馈下参考输入为r(t)=1(t)的输出响应y(t)
2)求输出响应的阻尼比和自然频率
29.为使校正后系统超调量,调节时间秒(),试给出一种闭环主导极点的选择。
(-6+15.654j,-6-15.654j)
30.决定控制系统稳定误差的三个要素为输入信号类型、开环增益K和系统中含积分环节的个数。
31.试分析一阶惯性环节中k和T在阶跃响应中的作用。
32.下图分别为单位负反馈系统和它的单位阶跃曲线图
其中为放大系数,试确定系统参数和。
闭环传函为:
,由可确定出
33.统稳态误差分析
已知单位反馈系统开环传函如下,求输入量分别为1(t)、t·
1(t)、
34.系统暂态性能分析
1)已知单位反馈系统开环传函如下,
求系统的ξ、ωn及性能指标σ%、ts(5%)。
ξ=0.5、ωn=10、σ%=16.3%、ts(5%)=0.6(s)
2)系统闭环传函为:
ξ=0.707、ωn=2、σ%=4.3%、ts(5%)=2.1(s)
3)已知单位反馈系统开环传函如下,
绘Bode图,并估算性能指标σ%、ts(5%)。
σ%=3.3%、ts(5%)=0.26(s)
4)知单位反馈系统开环传函如下,
绘制根轨迹,并分析系统性能与K1的关系。
K1>0系统始终是稳定的
K1>K11后系统出现振荡,且K1越大,振荡越厉害。
35.系统稳定性分析。
1)系统特征方程如下:
2)统特征方程如下:
为使系统具有1个单位的稳定裕量,求K的取值范围。
35.一单位反馈系统的开环传递函函数为,求系统的单位阶跃响应及动态性能指标。
第四章根轨迹
1.设开环传递函数为,试求实轴上的根轨迹。
2.在开环系统中增加零点,可使根轨迹向左方移动。
3.在开环系统中增加极点,可使根轨迹向右方移动。
4.开环传递函数为,试求实轴上的根轨迹区间。
5.已知开环传递函数G(s)=kg/s(s+1)(s+2),概略作它的单位反馈系统根轨迹曲线。
要求说明根轨迹有几条渐近线,渐近线和实轴的交点坐标。
6.设系统开环传递函数为,求其根轨迹和虚轴的交点坐标。
7.开环传递函数的分母阶次为n,分子阶次为m(n≥m),则其根轨迹有条分支,和条渐近线。
8.单位负反馈系统的开环传递函数为,试确定根轨迹在实轴上的分离点和会合点的位置。
9.已知开环传递函数G(s)=kg/s(s+1)(s+2),概略作出它的单位负反馈系统的根轨迹曲线。
要求说明根轨迹和虚轴的交点坐标,以及相交时的增益kg。
10.已知开环传递函数为,试求根轨迹和虚轴的交点坐标
11.单位负反馈系统的开环传递函数为,试证明在根轨迹上,并求出相应kg值。
(kg=12)
第五章频域分析
1.复数的幅值是 ,幅角是。
2.复数的幅值是,幅角是。
3.系统的对数幅频特性和相频特性有一一对应关系,则它必是最小相位系统。
4.判别系统闭环稳定性时,开环传递函数有2个不稳定极点,Nyquist曲线包围点顺时针2周,则闭环系统有四个极点在右半平面。
5.0型系统Bode图幅频特性的低频段是一条斜率为的直线。
6.在作惯性环节的Bode图时,用折线近似幅频特性,在转折频率处的误差如何计算。
7.给定传递函数,概略画出它的极坐标图(由),要求判断曲线是否穿越实(虚)轴,若穿越,求穿越点的频率和相应的幅值。
8.开环系统的Nyquist曲线如右,则闭环系统
的右半平面极点数为。
(P=1为开环系统右半平面极点个数)。
9.延时环节的Nyquist图为什么是一个原点在园心的单位园?
10.传连函数的Nyquist曲线,=0的起始点位置为什么在相角-180°
的无穷远处,且在负实轴下方?
11.试分析增益K的变化对Bode图幅频特性和相频特性曲线形状的影响。
K增值大,对数幅频曲线的高度增高,相频曲线不变
12.已知单位负反馈控制系统的开环传递函数为
1)试求它的截止频率和相位裕量,该系统是否稳定?
2)若只用增益串联校正使系统的相位裕量为,问附加增益应为多大?
13.最小相位系统的幅频特性图如左,
1)求该系统的传递函数
2)概略地画出对应的相频特性图
14.简述系统的低、中、高频段频率特性分别和系统性能的关系。
低频段影响系统的稳态精度和稳定性;
中频段影响系统的动态性能和稳定性;
高频段决定系统的抗干扰能力。
15.Ⅱ型系统Bode图幅频特性的低频段是一条斜率为的直线。
16.单位负反馈系统的开环传递函数G(s)=10/s(1+0.5s)(s-1)
试用Nyquist稳定性判据判别闭环系统的稳定性,并确定闭环系统的相位裕量。
17.为什么在Bode图上不同串联环节的合成可以将各曲线的幅值和幅角分别叠加?
设


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自动控制 原理 复习题 本部
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 转基因粮食的危害资料摘编Word下载.docx
转基因粮食的危害资料摘编Word下载.docx
-
高中英语词组大全Word文档下载推荐.docx
-
卫计局年工作总结及新年工作计划Word格式.docx
-
贵州省煤矿安全管理人员安全资格证A考试概况Word格式.docx
-
系统集成项目招标文件Word文件下载.docx
-
消防设计技术审查的要点Word文档格式.docx
-
第三章 习题课 带电粒子在磁场或复合场中的运动Word格式.docx
-
湖南岳阳中考英语模拟卷含答案Word文档格式.docx
-
电子商务考试题总汇打印版打印打印Word下载.docx
-
选调生考试备考言语理解与表达真题Word文档格式.docx
-
高考物理实验题专练 专练15Word文档格式.docx
-
加装奥迪A4L蓝牙电话功能Word文档下载推荐.docx
-
学年下学期好教育高三月考仿真卷A卷 语文 学生版后附详解Word文档下载推荐.docx
-
净化生产车间工程一般施工技术施工方案Word文档格式.docx
-
内蒙古呼和浩特市第六中学学年高一政治下学期期末考试试题Word下载.docx
-
证券行业客户经理电话营销技巧与实例Word文档下载推荐.docx
-
叶芝 苇间风文档格式.docx
-
最新中美贸易摩擦的原因及解决对策1论文Word文件下载.docx
-
意义的近义词Word格式文档下载.docx
-
上海市中考英语试题S.docx
-
专题12观点论证类设问.docx
-
附加安心重疾条款.docx
-
设计变更管理办法修改意见稿FINAL汇编.docx
-
毕业赠言毕业致词精选多篇.docx
-
银行新员工代表发言稿精选多篇.docx
-
北京市朝阳区届高三第一学期期末语文试题Word版含答案.docx
-
HL线切割使用说明书模板.docx
-
车工实训周记.docx
-
USBHID键盘扫描码.docx
-
Apmpoqu4调研报告.docx
-
最熟悉的陌生人作文八篇.docx
-
被动语态综合讲解.docx
-
影视音乐欣赏Word文档格式.docx
-
上海市届九年级英语上学期期中试题人教新目标版文档格式.docx
-
职业规划书文档格式.docx
-
柴油发电机施工方案Word文档格式.docx
-
演唱会投资合同标准版Word文件下载.docx
-
音体美艺术理论考试试题讲解文档格式.docx
-
专题2物态变化Word文档下载推荐.docx
-
实验室生物安全管理制度Word格式文档下载.docx
-
小学教导处第六周教学常规督查简报Word格式.docx
-
新安全生产法答题附答案文档格式.docx
-
中考作文四大主题Word格式文档下载.docx
-
桩基工程合同文件Word格式.docx
-
承包商安全教育培训资料Word文件下载.docx
-
国家记忆观后感精选10篇Word格式.docx
-
夜上受降城闻笛教学设计优秀教案Word格式文档下载.docx
-
初一语文选择题100道+答案文档格式.docx
-
社区急诊及参考答案Word文档下载推荐.docx
-
新能源汽车租赁合同Word格式.docx
-
校园招聘会策划书活动方案Word文档下载推荐.docx
